Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Matlab Part3Documento17 pagineMatlab Part3Liu WenNessuna valutazione finora
- 3D Culture of Osteoblast-Like Cells by Unidirectional or Oscillatory Flow For Bone Tissue EngineeringDocumento9 pagine3D Culture of Osteoblast-Like Cells by Unidirectional or Oscillatory Flow For Bone Tissue EngineeringLiu WenNessuna valutazione finora
- TR41.9!00!02 010 PSDMeasurementPrezDocumento14 pagineTR41.9!00!02 010 PSDMeasurementPrezLiu WenNessuna valutazione finora
- 2015 SPIEOIXV LaserGating DemirDocumento12 pagine2015 SPIEOIXV LaserGating DemirLiu WenNessuna valutazione finora
- CH8 SolutionsDocumento10 pagineCH8 SolutionsLiu WenNessuna valutazione finora
- Homework 1 Solutions. Ch.2 Updated 2/5/2013Documento8 pagineHomework 1 Solutions. Ch.2 Updated 2/5/2013Liu WenNessuna valutazione finora
- Innovus Implementation System DsDocumento4 pagineInnovus Implementation System DsLiu WenNessuna valutazione finora
- Lecture 3 Electrical CircuitsDocumento32 pagineLecture 3 Electrical CircuitsLiu WenNessuna valutazione finora
- Petrone ThesisDocumento96 paginePetrone ThesisCarlos CarriNessuna valutazione finora
- Lab 3Documento4 pagineLab 3Liu WenNessuna valutazione finora
- Routing Algorithms Routing Algorithms - II: Reading Assignment Reading AssignmentDocumento26 pagineRouting Algorithms Routing Algorithms - II: Reading Assignment Reading AssignmentLiu WenNessuna valutazione finora
- DFT, DFY, and DFR Which One(s) Do You Worry About?Documento1 paginaDFT, DFY, and DFR Which One(s) Do You Worry About?Liu WenNessuna valutazione finora
- Problem Solving Exercises 2: Mate/ Ee 129: Homework Spring 2000Documento2 pagineProblem Solving Exercises 2: Mate/ Ee 129: Homework Spring 2000Liu WenNessuna valutazione finora
- Iscug 2013 Hls TutorialDocumento96 pagineIscug 2013 Hls TutorialLiu WenNessuna valutazione finora
- Small Signal 3110Documento12 pagineSmall Signal 3110Liu WenNessuna valutazione finora
- AN N-F F - O E: EW OLD LIP Flop With Utput NableDocumento9 pagineAN N-F F - O E: EW OLD LIP Flop With Utput NableLiu WenNessuna valutazione finora
- Models Im System Csi MDocumento28 pagineModels Im System Csi MLiu WenNessuna valutazione finora
- Modeling and Analysis of Differential VcosDocumento20 pagineModeling and Analysis of Differential VcosLiu WenNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- 1-B - SC - SyllabusDocumento10 pagine1-B - SC - SyllabusBhargava PrasadNessuna valutazione finora
- MPI - Lab ManualDocumento31 pagineMPI - Lab ManualSagar AhirNessuna valutazione finora
- Computer Architecture Assignment 1Documento4 pagineComputer Architecture Assignment 1Emilia KullutweNessuna valutazione finora
- Macro Macro Processor PDFDocumento53 pagineMacro Macro Processor PDFMariyam ArsiwalaNessuna valutazione finora
- L16 Multicycle MIPSDocumento38 pagineL16 Multicycle MIPSkumarguptav91Nessuna valutazione finora
- HCIA-Intelligent Computing V1.0 Training MaterialDocumento316 pagineHCIA-Intelligent Computing V1.0 Training MaterialarsiemarNessuna valutazione finora
- Computer Organization: Virtual MemoryDocumento26 pagineComputer Organization: Virtual Memorychuks felix michaelNessuna valutazione finora
- Wa0011.Documento21 pagineWa0011.mrprofessor7362Nessuna valutazione finora
- BRSTM 8Documento16 pagineBRSTM 8contactscribdNessuna valutazione finora
- CS802A Lec-2 PDFDocumento28 pagineCS802A Lec-2 PDFAnonymous aEBzOzAcX7Nessuna valutazione finora
- Mini Max Mode in 8086Documento9 pagineMini Max Mode in 8086aliraqisaad478Nessuna valutazione finora
- Lesson Plan - COADocumento4 pagineLesson Plan - COAmvdurgadeviNessuna valutazione finora
- Basic Structure of Computers & Machine Instructions and ProgramsDocumento47 pagineBasic Structure of Computers & Machine Instructions and ProgramsRohan RNessuna valutazione finora
- Allwinner R16 User Manual V1.2Documento529 pagineAllwinner R16 User Manual V1.2Edgar MartinezNessuna valutazione finora
- Unit 2 NotesDocumento44 pagineUnit 2 NotesARPAN KUMAR BHANDARINessuna valutazione finora
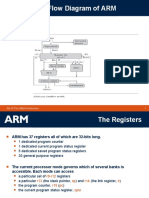
- Data Flow Diagram of ARM: 1 39v10 The ARM ArchitectureDocumento7 pagineData Flow Diagram of ARM: 1 39v10 The ARM ArchitectureMohnishNessuna valutazione finora
- OS390 Assemble ProgrammingDocumento377 pagineOS390 Assemble ProgrammingSreenivas RaoNessuna valutazione finora
- Name: - Tengku Muhammad Firdaus - ID: Section: - 01 - Date: - 16/11/2021 - Quiz 1Documento2 pagineName: - Tengku Muhammad Firdaus - ID: Section: - 01 - Date: - 16/11/2021 - Quiz 1TENGKU FIRDAUSNessuna valutazione finora
- Microprocessor and Interfacing: Course Contents (Uec Scheme)Documento7 pagineMicroprocessor and Interfacing: Course Contents (Uec Scheme)Arpit SinghNessuna valutazione finora
- Computer Hardware DesignDocumento49 pagineComputer Hardware DesignMohd AnasNessuna valutazione finora
- The Complete Collection of Instructions That Are Understood by A CPU Is Called Instruction Set. - It Has Its Own Formats and ElementsDocumento17 pagineThe Complete Collection of Instructions That Are Understood by A CPU Is Called Instruction Set. - It Has Its Own Formats and ElementsGebrie BeleteNessuna valutazione finora
- What Is Computer ArchitectureDocumento2 pagineWhat Is Computer ArchitectureVideos BankNessuna valutazione finora
- Timer/ Counters: Engr. Dr. Christopher U. Ngene, Dept. of Communication and Computer Engineering, ATBU, EmailDocumento50 pagineTimer/ Counters: Engr. Dr. Christopher U. Ngene, Dept. of Communication and Computer Engineering, ATBU, EmailLawal Ahmed ShehuNessuna valutazione finora
- Mcasyllabuswef 1920Documento160 pagineMcasyllabuswef 1920Burugolla RaviNessuna valutazione finora
- Computer Architecture and Organization: Dr. Mohd Hanafi Ahmad HijaziDocumento47 pagineComputer Architecture and Organization: Dr. Mohd Hanafi Ahmad HijaziMae XNessuna valutazione finora
- DELTA IA-PLC As Manual de ProgramacionDocumento1.332 pagineDELTA IA-PLC As Manual de ProgramacionFranciscoBarichivichNessuna valutazione finora
- Coma Answers PDFDocumento12 pagineComa Answers PDFKrishilNessuna valutazione finora
- HH Series HMI & PLCDocumento16 pagineHH Series HMI & PLCDeliver rNessuna valutazione finora
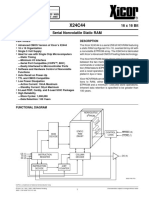
- X24C44 256 Bit 16 X 16 Bit: Features DescriptionDocumento16 pagineX24C44 256 Bit 16 X 16 Bit: Features DescriptionMarinaBogaoNessuna valutazione finora
- Dell Optiplex G1-GX1 Service ManualDocumento178 pagineDell Optiplex G1-GX1 Service ManualOleg_Zaytsev_8027Nessuna valutazione finora