Potrebbero piacerti anche
- Midterm Exam Gor Grade 11Documento2 pagineMidterm Exam Gor Grade 11Algelle AbrantesNessuna valutazione finora
- Sat Vocabulary Lesson and Practice Lesson 5Documento3 pagineSat Vocabulary Lesson and Practice Lesson 5api-430952728Nessuna valutazione finora
- GCSE AstronomyDocumento30 pagineGCSE Astronomyharris123mc100% (1)
- Bilateral Load Following in A Restructured Power System With Local ControllersDocumento6 pagineBilateral Load Following in A Restructured Power System With Local ControllersRajeshJosephAbrahamEdasseriathuNessuna valutazione finora
- Load Frequency Control of Interconnected Restructured Power System Along With DFIG and Coordinated Operation of TCPS-SMESDocumento6 pagineLoad Frequency Control of Interconnected Restructured Power System Along With DFIG and Coordinated Operation of TCPS-SMESCristina MendozaNessuna valutazione finora
- Load Frequency Control For Multiple-Area Power Systems: Proceedings of The American Control Conference July 2009Documento7 pagineLoad Frequency Control For Multiple-Area Power Systems: Proceedings of The American Control Conference July 2009KhethanNessuna valutazione finora
- AGC Modelado Simulación IndiaDocumento11 pagineAGC Modelado Simulación IndiacastrojpNessuna valutazione finora
- Load Frequency Control of An Isolated Micro GridDocumento11 pagineLoad Frequency Control of An Isolated Micro GridnhatvpNessuna valutazione finora
- Load Following in A Deregulated Power System With Thyristor Controlled Series CompensatorDocumento10 pagineLoad Following in A Deregulated Power System With Thyristor Controlled Series Compensatorraa2010Nessuna valutazione finora
- 1 s2.0 S2212017316305199 MainDocumento10 pagine1 s2.0 S2212017316305199 MainNebiyu TenayeNessuna valutazione finora
- Frequency Stabilization Using Fuzzy Logic Based Controller For Multi-Area Power System in Deregulated EnvironmentDocumento10 pagineFrequency Stabilization Using Fuzzy Logic Based Controller For Multi-Area Power System in Deregulated Environmentyogi_sikarNessuna valutazione finora
- Sample Research PaperDocumento12 pagineSample Research PaperPrakash ChorageNessuna valutazione finora
- Scaling Factor Tuning of Fuzzy Logic Controller For Load Frequency Control Using Particle Swarm Optimization Technique - IndiaDocumento10 pagineScaling Factor Tuning of Fuzzy Logic Controller For Load Frequency Control Using Particle Swarm Optimization Technique - IndiagaviotasilvestreNessuna valutazione finora
- 1 s2.0 S0142061517330727 MainDocumento12 pagine1 s2.0 S0142061517330727 MainIrfanAhmedNessuna valutazione finora
- LFC v8 msc2013 Final PDFDocumento7 pagineLFC v8 msc2013 Final PDFdimas sandiNessuna valutazione finora
- Model Predictive Based Load Frequency Control Design in The Presence of DFIG Wind TurbineDocumento5 pagineModel Predictive Based Load Frequency Control Design in The Presence of DFIG Wind TurbineILBERIPUCINessuna valutazione finora
- 1 s2.0 S1110016818301972 MainDocumento12 pagine1 s2.0 S1110016818301972 MainKaleeswari SaraswathiNessuna valutazione finora
- 535 11910 1 PB PDFDocumento12 pagine535 11910 1 PB PDFAnonymous fHEEc2lx6Nessuna valutazione finora
- Multi Verse Optimized Fractional Order PDPI Controller For Load Frequency ControlDocumento15 pagineMulti Verse Optimized Fractional Order PDPI Controller For Load Frequency Controlsrinivasa rathnamNessuna valutazione finora
- Load Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerDocumento4 pagineLoad Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerSudhir KumarNessuna valutazione finora
- Load Frequency Control in Three Area Power System Using Fuzzy Logic ControllerDocumento6 pagineLoad Frequency Control in Three Area Power System Using Fuzzy Logic ControllerEditor IJTSRDNessuna valutazione finora
- Stability Analysis and Controller Design of DC Microgrids With Constant Power LoadDocumento8 pagineStability Analysis and Controller Design of DC Microgrids With Constant Power Loadpavan gangwarNessuna valutazione finora
- 01 06Documento6 pagine01 06Vikas PatelNessuna valutazione finora
- R 4-45 PDFDocumento4 pagineR 4-45 PDFAhmed WestministerNessuna valutazione finora
- Load Frequency Control in Single Area System Using Model Predictive Control and Linear Quadratic Gaussian TechniquesDocumento4 pagineLoad Frequency Control in Single Area System Using Model Predictive Control and Linear Quadratic Gaussian TechniquesAkshay RohanNessuna valutazione finora
- Congestion Management in Deregulated Power System Using Different Control TechniqueDocumento8 pagineCongestion Management in Deregulated Power System Using Different Control TechniqueIJRASETPublicationsNessuna valutazione finora
- Hardware in The Loop Simulation of Direct Synthesis Based Two Degree of Freedom PID Control of DC-DC Boost Converter Using Real Time Digital Simulation in FPGADocumento5 pagineHardware in The Loop Simulation of Direct Synthesis Based Two Degree of Freedom PID Control of DC-DC Boost Converter Using Real Time Digital Simulation in FPGADr Tarakanath KobakuNessuna valutazione finora
- 4N6 Ijeset603Documento11 pagine4N6 Ijeset603rajput1402Nessuna valutazione finora
- LFC Dereg BMDocumento10 pagineLFC Dereg BMgtchsekharNessuna valutazione finora
- E3sconf SeFet2019 01012Documento4 pagineE3sconf SeFet2019 01012dolaNessuna valutazione finora
- E3sconf SeFet2019 01012 PDFDocumento4 pagineE3sconf SeFet2019 01012 PDFdolaNessuna valutazione finora
- Chapter 1Documento46 pagineChapter 1Asish NandaNessuna valutazione finora
- Load-Frequency Regulation Under0-06Documento9 pagineLoad-Frequency Regulation Under0-06kodandaram100% (1)
- Fuzzy Logic For Single AreaDocumento11 pagineFuzzy Logic For Single Areaabata yohannesNessuna valutazione finora
- A Practical Integration of Automatic Generation Control and Demand ResponseDocumento6 pagineA Practical Integration of Automatic Generation Control and Demand ResponseDaniel JesusiNessuna valutazione finora
- AGC Deregulación NigeriaDocumento6 pagineAGC Deregulación NigeriacastrojpNessuna valutazione finora
- Fuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012Documento5 pagineFuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012bhargavkoriya837Nessuna valutazione finora
- 1 s2.0 S0378779622008823 MainDocumento17 pagine1 s2.0 S0378779622008823 MainSouhila Rached ZINENessuna valutazione finora
- Kim 2011Documento13 pagineKim 2011Eman TarekNessuna valutazione finora
- A New Literature Review of Automatic Generation Control in Deregulated Environment PDFDocumento7 pagineA New Literature Review of Automatic Generation Control in Deregulated Environment PDFrameshsmeNessuna valutazione finora
- Optimal Design of Automatic Generation Control Based On Simulated Annealing in Interconnected Two-Area Power System Using Hybrid PIDDocumento15 pagineOptimal Design of Automatic Generation Control Based On Simulated Annealing in Interconnected Two-Area Power System Using Hybrid PIDASHWEENA A/P SUNDARNessuna valutazione finora
- Adaptive MPC Current Control-4Documento8 pagineAdaptive MPC Current Control-4sainadh saiNessuna valutazione finora
- Community Microgrid: Control Structure, Design, and StabilityDocumento9 pagineCommunity Microgrid: Control Structure, Design, and Stabilitycongduy0908Nessuna valutazione finora
- Design of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemDocumento9 pagineDesign of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemAmberMeerabNessuna valutazione finora
- 1 s2.0 S0142061521002726 MainDocumento29 pagine1 s2.0 S0142061521002726 MainIrfanAhmedNessuna valutazione finora
- Decentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlDocumento10 pagineDecentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlNirav ChauhanNessuna valutazione finora
- Automatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesDocumento11 pagineAutomatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesFernando RamosNessuna valutazione finora
- Implementation of Network Reconfiguration Technique For Loss Minimization On A Standard 16 Bus Distribution SystemDocumento4 pagineImplementation of Network Reconfiguration Technique For Loss Minimization On A Standard 16 Bus Distribution SystemMarulasiddappa H BNessuna valutazione finora
- Model Predictive Control of Plug-In Hybrid Electric Vehicles For Frequency Regulation in A Smart GridDocumento10 pagineModel Predictive Control of Plug-In Hybrid Electric Vehicles For Frequency Regulation in A Smart Gridmahmoud helalNessuna valutazione finora
- Hierarchical Frequency Control Scheme For Islanded Multi-Microgrids OperationDocumento6 pagineHierarchical Frequency Control Scheme For Islanded Multi-Microgrids OperationJitender KaushalNessuna valutazione finora
- Energy Based Battery Management System For Microgrids Using Fuzzy Logic ControllerDocumento5 pagineEnergy Based Battery Management System For Microgrids Using Fuzzy Logic ControllerInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- A Neuro Fuzzy Sliding Mode Controller For Load Frequency Problem in Deregulated Environment For Multi Area Power SystemDocumento6 pagineA Neuro Fuzzy Sliding Mode Controller For Load Frequency Problem in Deregulated Environment For Multi Area Power SystemAMIT SHARMANessuna valutazione finora
- Improved Particle Swarm Optimization Based Load Frequency Control in A Single Area Power SystemDocumento4 pagineImproved Particle Swarm Optimization Based Load Frequency Control in A Single Area Power SystemMekonnen ShewaregaNessuna valutazione finora
- Model Free DFIGDocumento12 pagineModel Free DFIG程崇律Nessuna valutazione finora
- Real-Time Nonlinear Model Predictive Control For MicrogriDocumento7 pagineReal-Time Nonlinear Model Predictive Control For MicrogriVinicius CurcioNessuna valutazione finora
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandDocumento8 pagineElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariNessuna valutazione finora
- Electric Power Systems Research: SciencedirectDocumento10 pagineElectric Power Systems Research: SciencedirectHamsa DeepikaNessuna valutazione finora
- Research Inventy: International Journal of Engineering and ScienceDocumento7 pagineResearch Inventy: International Journal of Engineering and ScienceinventyNessuna valutazione finora
- Final ReportDocumento5 pagineFinal Reportpriyanshum230825eeNessuna valutazione finora
- Improved Sequential Quadratic Programming Approach For Optimal Distribution Generation Sizing in Distribution NetworksDocumento7 pagineImproved Sequential Quadratic Programming Approach For Optimal Distribution Generation Sizing in Distribution NetworksBibhudatta PatnaikNessuna valutazione finora
- FuzzyDocumento6 pagineFuzzyManuel GuijarroNessuna valutazione finora
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDa EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNessuna valutazione finora
- Evolutionary Algorithms for Mobile Ad Hoc NetworksDa EverandEvolutionary Algorithms for Mobile Ad Hoc NetworksNessuna valutazione finora
- 19 BJAS 1kn 2014Documento6 pagine19 BJAS 1kn 2014aruljothiNessuna valutazione finora
- Social Forestry: Chapter - IiiDocumento26 pagineSocial Forestry: Chapter - IiiaruljothiNessuna valutazione finora
- EE6301 DLC Question Bank Rejinpaul 2Documento8 pagineEE6301 DLC Question Bank Rejinpaul 2aruljothiNessuna valutazione finora
- Ee6301 DLC Question Bank RejinpaulDocumento8 pagineEe6301 DLC Question Bank RejinpaularuljothiNessuna valutazione finora
- Shandong Baoshida Cable Co, LTD.: Technical ParameterDocumento3 pagineShandong Baoshida Cable Co, LTD.: Technical ParameterkmiqdNessuna valutazione finora
- Goliath 90 v129 eDocumento129 pagineGoliath 90 v129 eerkanNessuna valutazione finora
- Considerations For Impeller Trimming - Empowering Pumps and EquipmentDocumento8 pagineConsiderations For Impeller Trimming - Empowering Pumps and Equipment김기준Nessuna valutazione finora
- Murata High Voltage CeramicDocumento38 pagineMurata High Voltage CeramictycristinaNessuna valutazione finora
- 18 Ray Optics Revision Notes QuizrrDocumento108 pagine18 Ray Optics Revision Notes Quizrraafaf.sdfddfaNessuna valutazione finora
- Cecilia-Puff-Tee-Final-OUSM-Designs-12 MESES A TALLA 8Documento19 pagineCecilia-Puff-Tee-Final-OUSM-Designs-12 MESES A TALLA 8Jose SanchezNessuna valutazione finora
- Keiilf: Training ManualDocumento53 pagineKeiilf: Training ManualGary GouveiaNessuna valutazione finora
- SDHI18 - Komparativna Analiza Primene Vodostana I Sinhronih Regulatora TurbinaDocumento13 pagineSDHI18 - Komparativna Analiza Primene Vodostana I Sinhronih Regulatora TurbinaAleksandar PetkovicNessuna valutazione finora
- Douluo Dalu Volume 05 - Star Dou Forest PDFDocumento141 pagineDouluo Dalu Volume 05 - Star Dou Forest PDFRay Joseph LealNessuna valutazione finora
- 1762 Ob8 PDFDocumento16 pagine1762 Ob8 PDFRodríguez EdwardNessuna valutazione finora
- Electricity NotesDocumento35 pagineElectricity Notesapi-277818647Nessuna valutazione finora
- 123 09-Printable Menu VORDocumento2 pagine123 09-Printable Menu VORArmstrong TowerNessuna valutazione finora
- Ad149 Manual RDocumento69 pagineAd149 Manual RCharityNessuna valutazione finora
- Fully Automatic Coffee Machine - Slimissimo - IB - SCOTT UK - 2019Documento20 pagineFully Automatic Coffee Machine - Slimissimo - IB - SCOTT UK - 2019lazareviciNessuna valutazione finora
- SCM (Subway Project Report)Documento13 pagineSCM (Subway Project Report)Beast aNessuna valutazione finora
- Poly 103Documento20 paginePoly 103Sharifah Zulaikha BenYahyaNessuna valutazione finora
- AssessmentDocumento9 pagineAssessmentJuan Miguel Sapad AlpañoNessuna valutazione finora
- Unit 3Documento12 pagineUnit 3Erik PurnandoNessuna valutazione finora
- Biomedical Engineering Handbook Revised 5 2015Documento37 pagineBiomedical Engineering Handbook Revised 5 2015Teja GuttiNessuna valutazione finora
- Proefschrift T. Steenstra - tcm24-268767Documento181 pagineProefschrift T. Steenstra - tcm24-268767SLAMET PAMBUDINessuna valutazione finora
- Anxiety Disorders - Causes, Types, Symptoms, & TreatmentsDocumento5 pagineAnxiety Disorders - Causes, Types, Symptoms, & Treatmentsrehaan662Nessuna valutazione finora
- Amnaya Sutra (English)Documento458 pagineAmnaya Sutra (English)Assam Bhakti SagarNessuna valutazione finora
- Sales 20: Years Advertising Expense (Millions) X Sales (Thousands) yDocumento8 pagineSales 20: Years Advertising Expense (Millions) X Sales (Thousands) ybangNessuna valutazione finora
- AoS Soulbound - Pregens - Skyrigger Malgra DainssonDocumento2 pagineAoS Soulbound - Pregens - Skyrigger Malgra DainssonAdrien DeschampsNessuna valutazione finora
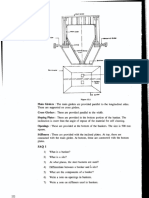
- Main Girders: CrossDocumento3 pagineMain Girders: Crossmn4webNessuna valutazione finora
- Provision of EPCI Services For EPCIC Sidayu Wellhead Platforms and Pipelines Sidayu Field DevelopmentDocumento7 pagineProvision of EPCI Services For EPCIC Sidayu Wellhead Platforms and Pipelines Sidayu Field Developmentriandi100% (1)
- TreesDocumento69 pagineTreesADITYA GEHLAWATNessuna valutazione finora