Potrebbero piacerti anche
- IEEE-TOM - Journal ArticleDocumento4 pagineIEEE-TOM - Journal ArticleedumacerenNessuna valutazione finora
- Optimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFDocumento6 pagineOptimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFrakeshee2007Nessuna valutazione finora
- Dynamic Design and Simulation Analysis of Permanent Magnet Motor in Different Scenario of Fed AlimentationDocumento7 pagineDynamic Design and Simulation Analysis of Permanent Magnet Motor in Different Scenario of Fed AlimentationjobNessuna valutazione finora
- Ref 9 PDFDocumento10 pagineRef 9 PDFAli H. NumanNessuna valutazione finora
- Analysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingDocumento4 pagineAnalysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingmohammadNessuna valutazione finora
- Wrobel2003 Article ANewApproachToReductionOfTheCoDocumento11 pagineWrobel2003 Article ANewApproachToReductionOfTheCoJohn XaviNessuna valutazione finora
- Analysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. KarkarDocumento4 pagineAnalysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. Karkarngnr_gull1952Nessuna valutazione finora
- Sistemas de Motor - ModelizacionDocumento8 pagineSistemas de Motor - ModelizacionJosue Rivera YaresiNessuna valutazione finora
- Paper - Naufal Hamdan Rivani - 18015030 PDFDocumento6 paginePaper - Naufal Hamdan Rivani - 18015030 PDFNaufal Hamdan RivaniNessuna valutazione finora
- Design Procedure of A Permanent MagnetDocumento4 pagineDesign Procedure of A Permanent MagnetJignesh LoharNessuna valutazione finora
- Ks PaperDocumento5 pagineKs PaperSatyam SwarupNessuna valutazione finora
- Computer Aided Design and FE Analysis of A PM BLDG Hub MotorDocumento6 pagineComputer Aided Design and FE Analysis of A PM BLDG Hub MotorDebarati DamNessuna valutazione finora
- Permanent Magnet DC Criteria: Motors Design and Operation AdvantagesDocumento7 paginePermanent Magnet DC Criteria: Motors Design and Operation Advantagesdjole07Nessuna valutazione finora
- A Permanent Magnet Synchronous Motor Traction Applications Electric VehiclesDocumento7 pagineA Permanent Magnet Synchronous Motor Traction Applications Electric VehiclesJavad Rahmany FardNessuna valutazione finora
- Design of A Small Scale Wind Generator For Low Wind Speed AreasDocumento15 pagineDesign of A Small Scale Wind Generator For Low Wind Speed Areasأحمد إبراهيم شواربNessuna valutazione finora
- A Review of The Design Issues and Techniques For Radial-Flux Brush Surface and Internal Rare Earth PM MotorsDocumento17 pagineA Review of The Design Issues and Techniques For Radial-Flux Brush Surface and Internal Rare Earth PM MotorsأسامةبوعزيزNessuna valutazione finora
- Unknown 2Documento10 pagineUnknown 2churchilkingstonNessuna valutazione finora
- Analysis of The Impact of Magnetic Materials On Cogging Torque in Brushless DC MotorDocumento10 pagineAnalysis of The Impact of Magnetic Materials On Cogging Torque in Brushless DC MotorkkarthiksNessuna valutazione finora
- Design of 250 W AC Series MotorDocumento3 pagineDesign of 250 W AC Series MotorMiguel ArzamendiaNessuna valutazione finora
- Unbalanced Magnetic ForcesDocumento10 pagineUnbalanced Magnetic Forcesrakeshee2007Nessuna valutazione finora
- Design and Modelling of BLDC Motor For ADocumento7 pagineDesign and Modelling of BLDC Motor For AShubhzsNessuna valutazione finora
- An Analytical Approach For A High Speed and High Efficiency Induction Motor Considering Magnetic and Mechanical ProblemsDocumento4 pagineAn Analytical Approach For A High Speed and High Efficiency Induction Motor Considering Magnetic and Mechanical ProblemsRodielly IsaiasNessuna valutazione finora
- Optimal Design and Control of Axial-Flux Brushless DC Wheel Motor For Electrical VehiclesDocumento10 pagineOptimal Design and Control of Axial-Flux Brushless DC Wheel Motor For Electrical Vehiclesfre12345Nessuna valutazione finora
- Ho2010 Result of RotorDocumento4 pagineHo2010 Result of RotorIraqi stormNessuna valutazione finora
- Analysis and Design Optimization of An Improved AxDocumento9 pagineAnalysis and Design Optimization of An Improved AxSubrat DasNessuna valutazione finora
- Rare-Earth Free Motor With Field Poles Excited by Space HarmonicsDocumento6 pagineRare-Earth Free Motor With Field Poles Excited by Space HarmonicsHuong ThaoNessuna valutazione finora
- A Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine With High-Torque PerformanceDocumento4 pagineA Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine With High-Torque Performancejunaid ikramNessuna valutazione finora
- journalsresaim,+IJRESM V3 I8 85Documento4 paginejournalsresaim,+IJRESM V3 I8 85Andreagale GoNessuna valutazione finora
- 10 - UkaniszynDocumento11 pagine10 - UkaniszynLavanya ChandranNessuna valutazione finora
- FEM RotorDocumento5 pagineFEM RotorMirceaNessuna valutazione finora
- FEM Based Design and Performance Analysis of 2-Poles Universal MotorDocumento15 pagineFEM Based Design and Performance Analysis of 2-Poles Universal MotorBalaji DDNessuna valutazione finora
- A Comparison of Torque Capabilities of Axial Flux and Radial Flux Type of Brushless DC BLDC Drives For Wide Speed Range ApplicationsDocumento6 pagineA Comparison of Torque Capabilities of Axial Flux and Radial Flux Type of Brushless DC BLDC Drives For Wide Speed Range ApplicationssosiNessuna valutazione finora
- An Analysis of Bearingless AC MotorsDocumento8 pagineAn Analysis of Bearingless AC Motorsalstn7906Nessuna valutazione finora
- Design and Performance Analysis of Brushless DC Motor Using ANSYS MaxwellDocumento4 pagineDesign and Performance Analysis of Brushless DC Motor Using ANSYS MaxwellShubhzsNessuna valutazione finora
- Torque Quality and Comparison of InternaDocumento10 pagineTorque Quality and Comparison of InternaSamuel M.Nessuna valutazione finora
- 10 1 1 1034 5168 PDFDocumento6 pagine10 1 1 1034 5168 PDFRosa Elvira Montalvo MartínezNessuna valutazione finora
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocumento5 pagineSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNessuna valutazione finora
- Duncan1983 PDFDocumento7 pagineDuncan1983 PDFGiri TharanNessuna valutazione finora
- Tutorial On The Design of Hole-Slot-Type Cavity Magnetron Using CST Particle StudioDocumento9 pagineTutorial On The Design of Hole-Slot-Type Cavity Magnetron Using CST Particle Studiojax almarNessuna valutazione finora
- JOAPE - Volume 2 - Issue 2 - Pages 121-128Documento8 pagineJOAPE - Volume 2 - Issue 2 - Pages 121-128uma.bhuvanNessuna valutazione finora
- Performance Comparision of Internal and External Rotor Structured Wind Generators Mounted From Same Permanent Magnets On Same GeometryDocumento6 paginePerformance Comparision of Internal and External Rotor Structured Wind Generators Mounted From Same Permanent Magnets On Same GeometryHaider AddewanyNessuna valutazione finora
- Design of 3-Phase BLDC Motor For Electric Vehicle Application by Using Finite Element SimulationDocumento6 pagineDesign of 3-Phase BLDC Motor For Electric Vehicle Application by Using Finite Element Simulationsatyam swarup dubeyNessuna valutazione finora
- Development of Axial Flux HTS Induction Motors: International Meeting of Electrical Engineering Research ENIINVIE-2012Documento10 pagineDevelopment of Axial Flux HTS Induction Motors: International Meeting of Electrical Engineering Research ENIINVIE-2012Nilton Ramos EstebanNessuna valutazione finora
- Qi2020 Article DesignAndResearchOfDeepSlotUniDocumento13 pagineQi2020 Article DesignAndResearchOfDeepSlotUniArunNessuna valutazione finora
- Investigation of A Combined Electro Magnetic Structure of Bearingless Motor and Magnetic GearDocumento7 pagineInvestigation of A Combined Electro Magnetic Structure of Bearingless Motor and Magnetic GearnevesunipampaNessuna valutazione finora
- Design Procedure For Switched-Reluctance Motors: of ofDocumento6 pagineDesign Procedure For Switched-Reluctance Motors: of ofSuman SahaNessuna valutazione finora
- Zaratushtra, 816-FinalDocumento9 pagineZaratushtra, 816-FinalCao Đức HuyNessuna valutazione finora
- Design of A Miniature Axial-Flux Spindle Motor With Rhomboidal PCB WindingDocumento3 pagineDesign of A Miniature Axial-Flux Spindle Motor With Rhomboidal PCB WindingnevesunipampaNessuna valutazione finora
- In A On Boules La Ree, Use ADocumento3 pagineIn A On Boules La Ree, Use AjalilemadiNessuna valutazione finora
- Analysis and Calculation of The Electromagnetic Field in Permanent Magnet Synchronous Motor Based On ANSYSDocumento4 pagineAnalysis and Calculation of The Electromagnetic Field in Permanent Magnet Synchronous Motor Based On ANSYSSuman SahaNessuna valutazione finora
- Axial PErmanent MAgnetDocumento6 pagineAxial PErmanent MAgnetSatyam Swarup100% (1)
- The Monospiral Motorised Cable Reel in Crane AppliDocumento16 pagineThe Monospiral Motorised Cable Reel in Crane AppliTushar KachhadiyaNessuna valutazione finora
- The Proceedings of The Institution of Electrical Engineers: December 1962Documento9 pagineThe Proceedings of The Institution of Electrical Engineers: December 1962DEEPTHI NAIRNessuna valutazione finora
- Effect Armature Reaction The Magnet Motor: of and On Performance of Radial-Flux Permanent BrushlessDocumento5 pagineEffect Armature Reaction The Magnet Motor: of and On Performance of Radial-Flux Permanent BrushlessSuman SahaNessuna valutazione finora
- Utomo 2021 IOP Conf. Ser. Mater. Sci. Eng. 1034 012053Documento11 pagineUtomo 2021 IOP Conf. Ser. Mater. Sci. Eng. 1034 012053Jaga Karsa BFNessuna valutazione finora
- Design and Analysis of Moving Magnet Synchronous Surface Motor With Linear Halbach ArrayDocumento11 pagineDesign and Analysis of Moving Magnet Synchronous Surface Motor With Linear Halbach ArraysubruaNessuna valutazione finora
- FE Analysis and Computer-Aided Design of A Sandwiched Axial-Flux Permanent Magnet Brushless DC MotorDocumento3 pagineFE Analysis and Computer-Aided Design of A Sandwiched Axial-Flux Permanent Magnet Brushless DC MotorkkarthiksNessuna valutazione finora
- Achieving A Constant Power Speed Range For Drives: R. SlemonDocumento5 pagineAchieving A Constant Power Speed Range For Drives: R. SlemonSatyam SwarupNessuna valutazione finora
- Designing Air-Cored Axial Flux Permanent Magnet GeDocumento6 pagineDesigning Air-Cored Axial Flux Permanent Magnet GeSaleem AbbasNessuna valutazione finora
- Differential Forms on Electromagnetic NetworksDa EverandDifferential Forms on Electromagnetic NetworksValutazione: 4 su 5 stelle4/5 (1)
- Bab III.2.1. Generator Sinkron (Lanjutan)Documento28 pagineBab III.2.1. Generator Sinkron (Lanjutan)Hariz AudirahmawanNessuna valutazione finora
- Boss CS-2 Compression Sustainer Pedal Schematic Diagram: Electronics Schematic Diagrams Guitar EffectsDocumento4 pagineBoss CS-2 Compression Sustainer Pedal Schematic Diagram: Electronics Schematic Diagrams Guitar Effectsgangla1987Nessuna valutazione finora
- Overhead Conductor TypesDocumento5 pagineOverhead Conductor TypesHumayun AhsanNessuna valutazione finora
- Mix 4045Documento1 paginaMix 4045Mohamed El-AyouttiNessuna valutazione finora
- Chapter 9 Valves & Thermionic EmissionDocumento16 pagineChapter 9 Valves & Thermionic EmissionVan Nguyen Huu VanNessuna valutazione finora
- GCM en ArabeDocumento32 pagineGCM en ArabeDjamel BoukredimiNessuna valutazione finora
- Adjustable Precision Zener Shunt Regulator: (Top View) 1 2 3 4 V GND V GND (Top View)Documento9 pagineAdjustable Precision Zener Shunt Regulator: (Top View) 1 2 3 4 V GND V GND (Top View)noahkrpgNessuna valutazione finora
- KC 301198 1171686 PDFDocumento2 pagineKC 301198 1171686 PDFDiego Felipe Gavilán RetamalesNessuna valutazione finora
- Slua 143Documento15 pagineSlua 143Tonia KataNessuna valutazione finora
- SLD.v3 With Two Rec - at 225AT 006Documento1 paginaSLD.v3 With Two Rec - at 225AT 006bashirNessuna valutazione finora
- Wide-Lite Aktra GP Floodlight Bulletin 1996Documento4 pagineWide-Lite Aktra GP Floodlight Bulletin 1996Alan MastersNessuna valutazione finora
- OnSemi The TL431 in The Control of Switching Power Supplies PDFDocumento63 pagineOnSemi The TL431 in The Control of Switching Power Supplies PDFFernando BotteronNessuna valutazione finora
- Lab 1: Introduction To Trainer: Identifying Discrete Logic Gates, IC's, Pin ConfigurationsDocumento9 pagineLab 1: Introduction To Trainer: Identifying Discrete Logic Gates, IC's, Pin ConfigurationsPirzada SwatiNessuna valutazione finora
- Electronic Switches Test Report IEC 60669 - 2 - 1Documento61 pagineElectronic Switches Test Report IEC 60669 - 2 - 1Aritra DasguptaNessuna valutazione finora
- Biddle AC and AC/DC High-Pot TestersDocumento3 pagineBiddle AC and AC/DC High-Pot TestersMario Arturo RendonNessuna valutazione finora
- Harmonic Calculator WEG-1 00Documento35 pagineHarmonic Calculator WEG-1 00Diego SouzaNessuna valutazione finora
- Manual On Pre-Commissioning and Periodical Testing of Ehv Equipment-2Documento214 pagineManual On Pre-Commissioning and Periodical Testing of Ehv Equipment-2azad100% (1)
- Tabla de Amperajes Fusibles HH 24 KVDocumento1 paginaTabla de Amperajes Fusibles HH 24 KVBastian OspinaNessuna valutazione finora
- E-1 Laguda - 2 Storey Residential BuildingDocumento1 paginaE-1 Laguda - 2 Storey Residential Buildingmichael jan de celisNessuna valutazione finora
- DistributionSystem SinglePhaseTransformerDocumento5 pagineDistributionSystem SinglePhaseTransformerReparrNessuna valutazione finora
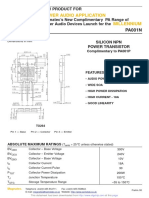
- Power Audio Application Millennium: New Product ForDocumento3 paginePower Audio Application Millennium: New Product Forjose antonio iglesias infantesNessuna valutazione finora
- Imesa - SECONDARY CABINS WITH INSULATED IMS IN SF6 APPROVED ENEL TYPE DY 800-1Documento4 pagineImesa - SECONDARY CABINS WITH INSULATED IMS IN SF6 APPROVED ENEL TYPE DY 800-1Lionel MocciaNessuna valutazione finora
- IEEE - Ground Fault ProtectionDocumento44 pagineIEEE - Ground Fault ProtectiontafmudNessuna valutazione finora
- Aircraft Electrical SystemsDocumento96 pagineAircraft Electrical SystemsMasadji SuwitoNessuna valutazione finora
- Randall Amplifiers Preliminary NAMM 2013 CatalogueDocumento9 pagineRandall Amplifiers Preliminary NAMM 2013 CatalogueSound Technology LtdNessuna valutazione finora
- Chapter 3. Alternator: 1. DescriptionDocumento21 pagineChapter 3. Alternator: 1. DescriptionGabriel QuijadaNessuna valutazione finora
- Data Sheet 630kva 33kv Cu F 90 Ip23Documento2 pagineData Sheet 630kva 33kv Cu F 90 Ip23Anshuman PandeyNessuna valutazione finora
- Assignment-4question and Solution PDFDocumento10 pagineAssignment-4question and Solution PDFUmang yadav0% (1)
- Metal Encloced SwitchgearDocumento12 pagineMetal Encloced SwitchgearjuevesNessuna valutazione finora
- Advance Harmonic FilterDocumento4 pagineAdvance Harmonic FilterMichael SetiawanNessuna valutazione finora