Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Programming Cat® Electronic Truck EngineDocumento258 pagineProgramming Cat® Electronic Truck EngineDuy Kha95% (108)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Diagramas Electricos, MK3 1.8 Mono-Motronic, ABS y AMM PDFDocumento20 pagineDiagramas Electricos, MK3 1.8 Mono-Motronic, ABS y AMM PDFElio MalvaresNessuna valutazione finora
- Towable Passenger Stairs Operating InstructionsDocumento22 pagineTowable Passenger Stairs Operating InstructionsFatekhunFarisNessuna valutazione finora
- Dodge Grand Caravan Es 1993 Wiring Diagrams SCHDocumento14 pagineDodge Grand Caravan Es 1993 Wiring Diagrams SCHJoseJulioFuentesAlfaro100% (2)
- Shop Manual HD785-5 CEBD013800Documento1.152 pagineShop Manual HD785-5 CEBD013800Ignacio Pérez100% (7)
- VDHS 4 Roll Squat DiveDocumento43 pagineVDHS 4 Roll Squat DiveVeraniJNessuna valutazione finora
- TRANSLATIONDocumento1 paginaTRANSLATIONAntonie AndreiNessuna valutazione finora
- Anexa Complet DaroxDocumento1 paginaAnexa Complet DaroxAntonie AndreiNessuna valutazione finora
- WJMM1VSK004278745: Enclosure No.3 To Sale Contract Anexa Nr. 2 A Contractului de VanzareDocumento1 paginaWJMM1VSK004278745: Enclosure No.3 To Sale Contract Anexa Nr. 2 A Contractului de VanzareAntonie AndreiNessuna valutazione finora
- Anexa Nr. 2 A Contractului: Fuel Tank: 2 Rezervoare Combustibil: 2 RezervoareDocumento2 pagineAnexa Nr. 2 A Contractului: Fuel Tank: 2 Rezervoare Combustibil: 2 RezervoareAntonie AndreiNessuna valutazione finora
- Fisa T460Documento1 paginaFisa T460Antonie AndreiNessuna valutazione finora
- Fisa T460Documento1 paginaFisa T460Antonie AndreiNessuna valutazione finora
- Price Cip Bucursti Pret Cip Bucuresti 30.000 +tvaDocumento1 paginaPrice Cip Bucursti Pret Cip Bucuresti 30.000 +tvaAntonie AndreiNessuna valutazione finora
- John Deere 350G LC Excavator Operation, Maintenance & Diagnostic Test Service Manual TM12173Documento31 pagineJohn Deere 350G LC Excavator Operation, Maintenance & Diagnostic Test Service Manual TM12173Equipment ManualsNessuna valutazione finora
- OewdDocumento372 pagineOewdsyamsuri samNessuna valutazione finora
- Bus Stop Layout DesignDocumento2 pagineBus Stop Layout DesignABHINANDAN K100% (1)
- 2017 Formula Bharat Business Logic CaseDocumento1 pagina2017 Formula Bharat Business Logic CaseArvind MNessuna valutazione finora
- Full Line Brochure ENdoosanDocumento2 pagineFull Line Brochure ENdoosanGustavoNessuna valutazione finora
- KINGS COLLEGE OF ENGINEERING HIGHWAY ENGINEERING UNIT-IDocumento24 pagineKINGS COLLEGE OF ENGINEERING HIGHWAY ENGINEERING UNIT-ISuresh Raju100% (1)
- Table 1. Diagnostic Trouble Codes Associated With Engine PerformanceDocumento12 pagineTable 1. Diagnostic Trouble Codes Associated With Engine PerformanceRobson belchiorNessuna valutazione finora
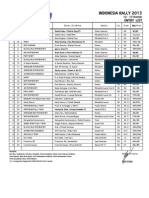
- Entry List Indonesia Rally 2013Documento1 paginaEntry List Indonesia Rally 2013HENDRY MAHMUD (SULSEL)Nessuna valutazione finora
- Analysis of a Hybrid Turbocharger for Improving IC Engine PerformanceDocumento9 pagineAnalysis of a Hybrid Turbocharger for Improving IC Engine PerformancezahidNessuna valutazione finora
- Subaru 2.5L-FPO - 158Documento1 paginaSubaru 2.5L-FPO - 158Edgar PhonoNessuna valutazione finora
- 2008 - Brochure - List - 12.01.22Documento7 pagine2008 - Brochure - List - 12.01.22fadzilismailNessuna valutazione finora
- Plano Thomas Numatico169484ADocumento3 paginePlano Thomas Numatico169484ADaniel Alex SánchezNessuna valutazione finora
- Non EngineDocumento1 paginaNon EngineLodyNessuna valutazione finora
- Maine DOT Moose AccidentsDocumento1 paginaMaine DOT Moose AccidentsNEWS CENTER MaineNessuna valutazione finora
- Presentation On AIR POWERED VEHICLEDocumento26 paginePresentation On AIR POWERED VEHICLEVishal SrivastavaNessuna valutazione finora
- SprintDocumento191 pagineSprintNelsonSanchez100% (1)
- Unit 04 VocabcardsDocumento7 pagineUnit 04 VocabcardsEdgar Peralta100% (1)
- Workshop Manual: BPW Trailer Axles With Drum BrakesDocumento69 pagineWorkshop Manual: BPW Trailer Axles With Drum BrakesAnton Van NiekerkNessuna valutazione finora
- CDE Components Commercial Diesel and Electrical Catalogue (Documento71 pagineCDE Components Commercial Diesel and Electrical Catalogue (Ray SullivanNessuna valutazione finora
- Diagrama MX 1Documento1 paginaDiagrama MX 1alejandro sanchezNessuna valutazione finora
- Aejsa Format ROZITABINTIMAINIRGS35890 (CONFERENCEPAPER) PDFDocumento11 pagineAejsa Format ROZITABINTIMAINIRGS35890 (CONFERENCEPAPER) PDFRozita MainirNessuna valutazione finora
- DBK VOR interference and arrival routesDocumento12 pagineDBK VOR interference and arrival routesArtem RassokhaNessuna valutazione finora
- Codage TutorialDocumento12 pagineCodage TutorialhallNessuna valutazione finora
- 2012 Kawasaki Ninja 250r 3Documento189 pagine2012 Kawasaki Ninja 250r 3Adolfo BarriosNessuna valutazione finora