Potrebbero piacerti anche
- ENTREVISTA - The Economy As A Complex Nonlinear SystemDocumento5 pagineENTREVISTA - The Economy As A Complex Nonlinear SystemDiego HenriqueNessuna valutazione finora
- Does The Existence of A Lax Pair Imply IntegrabilityDocumento5 pagineDoes The Existence of A Lax Pair Imply IntegrabilityDiego HenriqueNessuna valutazione finora
- A Simple and Unified Approach To Identify Integrable Nonlinear Oscillators and SystemsDocumento46 pagineA Simple and Unified Approach To Identify Integrable Nonlinear Oscillators and SystemsDiego HenriqueNessuna valutazione finora
- An Exact Mapping Between The Variational Renormalization Group and Deep LearningDocumento8 pagineAn Exact Mapping Between The Variational Renormalization Group and Deep LearningDiego HenriqueNessuna valutazione finora
- What Is A Chaotic AttractorDocumento8 pagineWhat Is A Chaotic AttractorDiego HenriqueNessuna valutazione finora
- Complex Lie Symmetries For Variational Problems - Complex ODE To Real PDEDocumento11 pagineComplex Lie Symmetries For Variational Problems - Complex ODE To Real PDEDiego HenriqueNessuna valutazione finora
- Constructive Factorization of LPDO in Two VariablesDocumento16 pagineConstructive Factorization of LPDO in Two VariablesDiego HenriqueNessuna valutazione finora
- Firstintegral 20180410Documento14 pagineFirstintegral 20180410Diego HenriqueNessuna valutazione finora
- Complex Lie Symmetries For Scalar Second-Order Ordinary Differential Equations - Complex ODE To Real PDEDocumento11 pagineComplex Lie Symmetries For Scalar Second-Order Ordinary Differential Equations - Complex ODE To Real PDEDiego HenriqueNessuna valutazione finora
- Creating Beamer Presentations in Scienti C Workplace and Scienti C WordDocumento46 pagineCreating Beamer Presentations in Scienti C Workplace and Scienti C WordDiego HenriqueNessuna valutazione finora
- Open Problems in Mathematics PDFDocumento547 pagineOpen Problems in Mathematics PDFDiego Henrique100% (4)
- GL (2, R) Geometry of ODE'sDocumento37 pagineGL (2, R) Geometry of ODE'sDiego HenriqueNessuna valutazione finora
- Weiss Approach To A Pair of Coupled Nonliear Reaction Diffusion EquationsDocumento7 pagineWeiss Approach To A Pair of Coupled Nonliear Reaction Diffusion EquationsDiego HenriqueNessuna valutazione finora
- Analytic Soliton Solutions of Cubic-Quintic Ginzburg-Landau Equation With Variable Nonlinearity and Spectral Filtering in Fiber LasersDocumento11 pagineAnalytic Soliton Solutions of Cubic-Quintic Ginzburg-Landau Equation With Variable Nonlinearity and Spectral Filtering in Fiber LasersDiego HenriqueNessuna valutazione finora
- Does The Existence of A Lax Pair Imply IntegrabilityDocumento5 pagineDoes The Existence of A Lax Pair Imply IntegrabilityDiego HenriqueNessuna valutazione finora
- OTTO - The Variational Formulation of The Fokker-Planck EquationDocumento17 pagineOTTO - The Variational Formulation of The Fokker-Planck EquationDiego HenriqueNessuna valutazione finora
- Constructive Factorization of LPDO in Two VariablesDocumento16 pagineConstructive Factorization of LPDO in Two VariablesDiego HenriqueNessuna valutazione finora
- A Simple and Unified Approach To Identify Integrable Nonlinear Oscillators and SystemsDocumento46 pagineA Simple and Unified Approach To Identify Integrable Nonlinear Oscillators and SystemsDiego HenriqueNessuna valutazione finora
- Complex Networks: T E P J BDocumento16 pagineComplex Networks: T E P J BDiego HenriqueNessuna valutazione finora
- Geometry Differential EquationsDocumento3 pagineGeometry Differential EquationsDiego HenriqueNessuna valutazione finora
- NASH - The Bargaining ProblemDocumento9 pagineNASH - The Bargaining ProblemDiego HenriqueNessuna valutazione finora
- Weiss Approach To A Pair of Coupled Nonliear Reaction Diffusion EquationsDocumento7 pagineWeiss Approach To A Pair of Coupled Nonliear Reaction Diffusion EquationsDiego HenriqueNessuna valutazione finora
- Geometrization of 3-Manifolds Via The Ricci Flow: Michael T. AndersonDocumento10 pagineGeometrization of 3-Manifolds Via The Ricci Flow: Michael T. AndersonDiego HenriqueNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- M10 - Partial Replacement of Fine Aggregate Using Polystyrene in Lightweight CHB-CE-503Documento19 pagineM10 - Partial Replacement of Fine Aggregate Using Polystyrene in Lightweight CHB-CE-503Michelle LeeNessuna valutazione finora
- Medication - Safety - v4 Last Update 2015Documento81 pagineMedication - Safety - v4 Last Update 2015Retno PalupiNessuna valutazione finora
- Hydraulic Power Steering System Design PDFDocumento16 pagineHydraulic Power Steering System Design PDFAdrianBirsan100% (1)
- Exile 3 Hint BookDocumento21 pagineExile 3 Hint BookLaura RoseNessuna valutazione finora
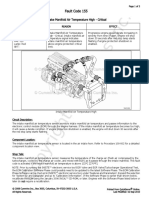
- Fault Code 155: Intake Manifold Air Temperature High - CriticalDocumento3 pagineFault Code 155: Intake Manifold Air Temperature High - Criticalhamilton miranda100% (1)
- HHG4M - Lifespan Development Textbook Lesson 4Documento88 pagineHHG4M - Lifespan Development Textbook Lesson 4Lubomira SucheckiNessuna valutazione finora
- Dimensions and Relations of The Dentogingival Junction in Humans. Gargiulo 1961Documento7 pagineDimensions and Relations of The Dentogingival Junction in Humans. Gargiulo 1961Linda Garcia PNessuna valutazione finora
- 89HPES24T3G2 Hardware Design Guide: NotesDocumento10 pagine89HPES24T3G2 Hardware Design Guide: NotesDavidNessuna valutazione finora
- AAA Variable Spring Hangers CatalogDocumento31 pagineAAA Variable Spring Hangers CatalogNopparut0% (1)
- 20 N 60 C 3Documento13 pagine20 N 60 C 3rashidmirzaNessuna valutazione finora
- M. Valerio Assignment 6.1Documento1 paginaM. Valerio Assignment 6.1Mark Kristian ValerioNessuna valutazione finora
- Reconsilation of Major Materials Steel SDA Lattice Ribs Rockbolts Admixture Etc.Documento99 pagineReconsilation of Major Materials Steel SDA Lattice Ribs Rockbolts Admixture Etc.Rajat SharmaNessuna valutazione finora
- Proceedings of National Conference on Landslides held in LudhianaDocumento8 pagineProceedings of National Conference on Landslides held in LudhianaAniket PawarNessuna valutazione finora
- 2009 ESC Guidelines On EndocarditisDocumento45 pagine2009 ESC Guidelines On EndocarditisDaondy Friarsa SoehartoNessuna valutazione finora
- Booster Pump Service ManualDocumento11 pagineBooster Pump Service ManualSGI AUTOMOTIVE PVT LTDNessuna valutazione finora
- Grammarism Ed Ing Adjectives Test 4 1189424Documento2 pagineGrammarism Ed Ing Adjectives Test 4 1189424Royal Stars Drama AcademyNessuna valutazione finora
- Ped 201 Toddler Observation LabDocumento6 paginePed 201 Toddler Observation Labapi-477856901Nessuna valutazione finora
- LTE Speech Traffic Dimenshioning For VoipDocumento6 pagineLTE Speech Traffic Dimenshioning For VoipRahul GuptaNessuna valutazione finora
- Global Warming Is The Term Used To Describe A Gradual Increase in The Average Temperature of The EarthDocumento6 pagineGlobal Warming Is The Term Used To Describe A Gradual Increase in The Average Temperature of The EarthSaswataBhattacharyaNessuna valutazione finora
- Monsterology Activity KitDocumento2 pagineMonsterology Activity KitCandlewick PressNessuna valutazione finora
- L4004N - 0920 - Nilfisk - Robotic-brochure-Liberty SC60Documento12 pagineL4004N - 0920 - Nilfisk - Robotic-brochure-Liberty SC60Lucianderson Marques FerreiraNessuna valutazione finora
- Eplob Eplob/A Epmob Epmob/A: PhotocellsDocumento2 pagineEplob Eplob/A Epmob Epmob/A: PhotocellsSupuran RichardoNessuna valutazione finora
- January 2010 QP - Unit 1 Edexcel Physics A-LevelDocumento23 pagineJanuary 2010 QP - Unit 1 Edexcel Physics A-Levelpraveen alwisNessuna valutazione finora
- Shariff NDocumento4 pagineShariff NKruu ChinnuNessuna valutazione finora
- The Karnataka Maternity Benefit (Amendment) Rules 2019Documento30 pagineThe Karnataka Maternity Benefit (Amendment) Rules 2019Manisha SNessuna valutazione finora
- 3.1-T.C.Dies PDFDocumento6 pagine3.1-T.C.Dies PDFYahyaMoummouNessuna valutazione finora
- Life Below WaterDocumento10 pagineLife Below Watertrisha sobito0% (1)
- Margot's Cafe MenuDocumento1 paginaMargot's Cafe Menumichael_burns_24Nessuna valutazione finora
- Gravimetric Analysis Lab ReportDocumento5 pagineGravimetric Analysis Lab Reportclaire_miller_16100% (1)
- Overview of Pathophysiology of Hypoxemia and HypoxiaDocumento15 pagineOverview of Pathophysiology of Hypoxemia and HypoxiaMARY ANN CAGATANNessuna valutazione finora