Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Valor Esperado de Una v. A.
Caricato da
pavaevDescrizione originale:
Titolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Valor Esperado de Una v. A.
Caricato da
pavaevCopyright:
Formati disponibili
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
CAPÍTULO 4
Valor Esperado de una Variable Aleatoria
Contenido del Capítulo
4.1) INTRODUCCIÓN.
4.2) VALOR ESPERADO.
4.2.1) Definición.
4.2.2) Propiedades.
4.2.3) Ejemplos.
4.3) VARIANZA Y DESVIACIÓN ESTÁNDAR.
4.2.1) Definiciones.
4.2.2) Propiedades.
4.2.3) Ejemplos.
4.4) VALOR ESPERADO CONDICIONAL.
4.5) MOMENTOS DE UNA VARIABLE ALEATORIA.
4.6) FUNCIÓN GENERADORA DE MOMENTOS.
4.7) FUNCIÓN CARACTERÍSTICA.
4.8) FUNCIÓN GENERADORA DE PROBABILIDADES.
4.9) INECUACIÓN DE CHEVYSHEV.
4.10) PROBLEMAS PROPUESTOS.
Rafael Díaz Página 4-1 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
4.1) INTRODUCCIÓN.
Las funciones de distribución y de densidad de una variable aleatoria permiten el
cálculo de probabilidades asociadas a eventos descritos en términos de intervalos de
números reales. Estas funciones encierran otras informaciones de mucho interés
para entender aún más el significado de la relación establecida entre el espacio
muestral del experimento y la correspondiente variable aleatoria y, en definitiva,
explicar el carácter estocástico de los experimentos aleatorios.
La base de estas nuevas informaciones es el concepto de valor esperado.
4.2) VALOR ESPERADO.
Cuando se realiza un experimento determinista el resultado del experimento es
único en contraposición con un experimento aleatorio en el cual existen un intervalo
de valores, según la variable aleatoria definida, donde es posible que ocurra
cualquier resultado. En ocasiones, por simplicidad, se aproxima la forma de explicar
un experimento aleatorio en términos de un experimento determinista pero con la
dificultad de no tener argumentos suficientes para escoger el resultado único que se
asociaría al experimento determinista. El conocimiento del concepto de valor
esperado ayuda a eliminar la dificultad planteada.
4.2.1) Definición.
Definición 4.1: El valor esperado de una variable aleatoria es su valor medio.
♦♦
Notas: - El valor esperado de una variable aleatoria se denotará por E(X).
Se colocará entre paréntesis el nombre de la variable aleatoria al
que se le está calculando el valor esperado.
- El valor esperado es un número. Ese número pertenece al
conjunto cuyos extremos son el mínimo valor y el máximo valor
que toma la variable aleatoria.
- El valor esperado de una variable aleatoria se calcula utilizando
la Ecuación 4.1.
- En el caso particular de una variable aleatoria discreta la
Ecuación 4.1 se simplifica como lo indica la Ecuación 4.2.
- La Ecuación 4.2 indica que el valor esperado de una variable
discreta es el promedio ponderado de sus valores.
∞
E( X ) = ∫ xf
−∞
X ( x)dx (ec. 4.1)
∞ ∞
n n
E( X ) = ∫ xf X ( x)dx = ∫ x ∑ P{ X = x i }δ ( x − x i ) dx = ∑ xi P{ X = xi } (ec. 4.2)
−∞ − ∞ i =1 i =1
Rafael Díaz Página 4-2 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
La estructura de la Ecuación 4.1 se presenta en otros contextos, como por ejemplo
en Mecánica, donde la función de densidad de probabilidades tiene el sentido de la
distribución de la masa a lo largo de un eje y el valor esperado se corresponde con el
centro de esa masa.
En el contexto de la teoría de probabilidades una variable aleatoria estará definida
en un cierto intervalo cuyo “centro” es su valor esperado. En este sentido, se podría
decir que el experimento aleatorio está definido alrededor del valor esperado y la
ponderación de cada uno de los posibles resultados viene dada en términos del valor
de la función de densidad correspondiente en cada punto. El concepto del valor
esperado permite aglutinar en un número los aportes ponderados de cada uno de los
posibles resultados del experimento.
Ejemplo 4.1: Sea el experimento de lanzar una moneda para el cual se define la
variable aleatoria Y dada por {Y : S → R / Y ( sello) = 0, Y (cara) = 1} . La asignación
de probabilidades, en general, será P{Y = 1} = p, P{Y = 0} = 1 – p. Hallar el valor
esperado de Y.
Según la Ecuación 4.2 se tiene que E(Y) = 0xP{Y = 0}+1xP{Y = 1} = p.
Note que el resultado no coincide con ninguno de los valores que puede tomar la
variable Y, pero es un valor en el intervalo (0,1).
♦♦
Ejemplo 4.2: Sea una variable aleatoria T cuya función de densidad de
probabilidades viene dada por el resultado del Ejemplo 3.15. Hallar el valor
esperado de T.
Del Ejemplo 3.15 se concluyó que
0, si t < 0
d 1
f T (t ) = FT (t ) = , si 0 ≤ t ≤ Tmax
dt Tmax
0, si t > Tmax
Según la Ecuación 4.1 se tiene que
∞ Tmax Tmax
t t2 Tmax
E (T ) = ∫ tf T (t )dt = ∫ dt = = .
−∞ 0
Tmax 2Tmax 0
2
Note que el resultado es un valor en el intervalo (0, Tmax).
♦♦
Rafael Díaz Página 4-3 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Definición 4.2: El valor esperado de una función g(x) de la variable aleatoria X
es el valor medio de g(x).
♦♦
Notas: - El valor esperado de una función g(x) de la variable aleatoria X
se denotará por E(g(X)). Se colocará entre paréntesis el nombre
de la función a la que se le está calculando el valor esperado.
- El valor esperado de una función es un número. Ese número
pertenece al conjunto cuyos extremos son el mínimo valor y el
máximo valor que toma esa función de la variable aleatoria.
- El valor esperado de una función g(x) de la variable aleatoria X
se calcula utilizando la Ecuación 4.3.
∞
E ( g ( X )) = ∫ g ( x) f
−∞
X ( x)dx (ec. 4.3)
4.2.2) Propiedades.
Las propiedades del valor esperado se desprenden de su definición como una
integral y de las características particulares que tenga la función de densidad de
probabilidades.
Propiedad 4.2.2.1: El valor esperado de una variable aleatoria cuya función de
densidad sea una función par vale cero.
Si la función de densidad es una función par se debe cumplir que fX(x) = fX(-x),
luego, a partir de la Ecuación 4.1 se puede escribir
∞ 0 ∞
E( X ) = ∫ xf X ( x)dx =
−∞ −∞
∫ xf X ( x)dx + ∫ xf X ( x)dx
0
si se realiza el cambio de variable x = - x en la primera integral queda
0 ∞
E ( X ) = ∫ (− x ) f X (− x)(− dx ) + ∫ xf X ( x)dx
∞ 0
utilizando ahora la propiedad de función par de f X (x)
∞ ∞
E ( X ) = − ∫ xf X ( x)dx + ∫ xf X ( x)dx = 0
0 0
♦♦
Rafael Díaz Página 4-4 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Propiedad 4.2.2.2: El valor esperado de una variable aleatoria cuya función de
densidad es simétrica respecto a un valor m es igual a ese valor.
Si la función de densidad es simétrica respecto a un valor m se debe cumplir que
fX(m+x) = fX(m-x), luego, a partir de la Ecuación 4.1 se puede escribir
∞ m ∞
E( X ) = ∫ xf X ( x)dx =
−∞ −∞
∫ xf X ( x)dx + ∫ xf X ( x)dx
m
si se realiza el cambio de variable x = m - x en la primera integral y
x = m + x en la segunda integral queda
0 ∞
E ( X ) = ∫ (m − x ) f X (m − x)(− dx ) + ∫ (m + x ) f X (m + x)dx
∞ 0
utilizando ahora la propiedad de simetría de f X (x) y separando en varias integrales
∞ ∞ ∞
E( X ) = ∫ mf
−∞
X ( x)dx − ∫ xf X (m + x)dx + ∫ xf X (m + x)dx = m
0 0
♦♦
Propiedad 4.2.2.3: El valor esperado de una constante a es igual a esa constante.
Sea la función g(x) = a, luego, a partir de la Ecuación 4.3 se puede escribir
∞ ∞
E (a) = ∫ af X ( x)dx = a ∫ f X ( x)dx = a
−∞ −∞
♦♦
Propiedad 4.2.2.4: El valor esperado de la función g(x) = bx donde b es una
constante es igual a esa constante por el valor esperado de X.
Sea la función g(x) = bx, luego, a partir de la Ecuación 4.3 se puede escribir
∞ ∞
E (bX ) = ∫ bxf X ( x)dx = b ∫ xf X ( x)dx = bE ( X )
−∞ −∞
♦♦
Rafael Díaz Página 4-5 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Propiedad 4.2.2.5: El valor esperado de la función g(x) = a + bx, donde a y b son
constantes, es igual a (a + bE(X)).
Sea la función g(x) = a + bx, luego, a partir de la Ecuación 4.3 y de las Propiedades
4.2.2.3 y 4.2.2.4, se puede escribir
∞ ∞ ∞
E (a + bX ) = ∫ (a + bx ) f
−∞
X ( x)dx = a ∫ f X ( x)dx + b ∫ xf X ( x)dx = a + bE ( X )
−∞ −∞
♦♦
Propiedad 4.2.2.6: El valor esperado de una variable aleatoria definida en un
intervalo (a,b) puede expresarse en términos de la función de distribución
b
acumulativa de probabilidades como b − ∫ FX ( x)dx .
a
A partir de la Ecuación 4.1 e integrando por partes, se puede escribir
b b b
E ( X ) = ∫ xf X ( x)dx = xFX ( x) a − ∫ FX ( x)dx = bFX (b) − aFX (a ) − ∫ FX ( x)dx
b
a a a
si X está definida en (a,b) entonces FX (b) = 1 y FX (a ) = 0, luego
b
E ( X ) = b − ∫ FX ( x)dx
a
♦♦
4.2.3) Ejemplos.
Ejemplo 4.3: Considere la variable aleatoria Z cuya función de densidad de
probabilidades se calculó en el Ejemplo 3.14. Hallar el valor esperado de Z.
6
1
Del resultado obtenido en el Ejemplo 3.14 se tiene que f Z ( z ) = ∑ δ ( z − i ) , luego
i =1 6
6
1 1 6 1 n(n + 1)
E ( Z ) = ∑ i = ∑ i = = 3.5
i =1 6 6 i =1 6 2 n =6
Note que el resultado no coincide con ninguno de los valores que puede tomar la
variable Z, pero es un valor en el intervalo (1,6).
♦♦
Rafael Díaz Página 4-6 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Ejemplo 4.4: Considere la variable aleatoria Y cuya función de densidad de
probabilidades se calculó en el Ejemplo 3.16. Hallar el valor esperado de Y.
Del resultado obtenido en el Ejemplo 3.16 se tiene que
0, si y < 0
f Y ( y ) = −λy
λe , si y ≥ 0
entonces, el valor esperado será
∞ ∞
1
E (Y ) = ∫ yλe − λy
dy = λ ∫ ye −λy dy =
0 0
λ
♦♦
Ejemplo 4.5: Considere la variable aleatoria Y cuya función de densidad de
probabilidades se calculó en el Ejemplo 3.17. Hallar el valor esperado de Y.
Del resultado obtenido en el Ejemplo 3.17 se tiene que
0, si y < 0
λe −λy , si 0 ≤ y < T
f Y ( y) = − λT
pe δ (t − T ), si y = T
µ (1 − p )e −λT − µ ( y −T ) , si y > T
lo cual hace ver que Y es una variable aleatoria mixta y el cálculo de su valor
esperado combina las características que se han destacado por separado en las
Ecuaciones 4.1 y 4.2. El valor esperado será
∞ T− ∞
∫ yf ∫ yλe ∫ yµ (1 − p)e
− λy − λT − µ ( y −T )
E (Y ) = Y ( y )dy = dy + TP{Y = T } + dy
−∞ 0 T+
1 1 1
E (Y ) = − e −λT + T + pTe −λT + (1 − p )e −λT + T
λ λ µ
1 1 1− p
E (Y ) = − e −λT −
λ λ µ
♦♦
Rafael Díaz Página 4-7 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Ejemplo 4.6: Considere la variable aleatoria X cuya función de densidad de
probabilidades se muestra en el Ejemplo 3.18. Hallar el valor esperado de X.
En el Ejemplo 3.18 se tiene que
x
, si 0 ≤ x ≤ 4
f X ( x) = 8
0, en otros casos
El valor esperado será
4 4
x x3 43 8
E ( X ) = ∫ x dx = = =
0
8 24 0
24 3
De forma alterna, se puede utilizar la Propiedad 4.2.2.6 ya que la variable aleatoria
cumple con los postulados de esa propiedad y la función de distribución se calculó
en el Ejemplo 3.18 consiguiendo
0, si x ≤ 0
2
x
FX ( x) = , si 0 ≤ x ≤ 4
16
1, si x > 4
Entonces, el valor esperado será
4
b
4
x2 x3 43 8
E ( X ) = b − ∫ FX ( x)dx = 4 − ∫ dx = 4 − = 4− =
a 0
16 48 0
48 3
♦♦
Rafael Díaz Página 4-8 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
4.3) VARIANZA Y DESVIACIÓN ESTÁNDAR.
En la sección anterior se analizó la definición de valor esperado tanto desde el punto
de vista matemático como desde el punto de vista del fenómeno aleatorio
involucrado. Este valor permite ubicar rápidamente la región donde está definida la
variable como aquella región que se encuentra alrededor del valor esperado. Pero no
proporciona información acerca del tamaño de esa región. Una medida de la
dispersión o de la concentración de la variable alrededor de su valor esperado lo
proporciona la varianza.
4.3.1) Definiciones.
Definición 4.3: La varianza de una variable aleatoria es el valor esperado de las
distancias de la variable a su valor esperado, medidas en forma cuadrática.
♦♦
Notas: - La varianza de la variable aleatoria X se denotará por V(X). Se
colocará entre paréntesis el nombre de la variable a la que se le
está calculando la varianza.
- La varianza es un número. Ese número pertenece al conjunto de
los reales positivos.
- La unidad de medida de la varianza es igual a la unidad de
medida de la variable elevada al cuadrado. Como ejemplo, si la
variable se mide en metros su varianza se mide en metros al
cuadrado.
- Mientras menor sea el valor de la varianza, más cerca estarán los
valores de la variable de su valor esperado.
- Mientras mayor sea el valor de la varianza, más alejados estarán
los valores de la variable de su valor esperado..
- La varianza de la variable aleatoria X se calcula utilizando la
Ecuación 4.4.
[
V ( X ) = E ( X − E ( X ))
2
] (ec. 4.4)
Definición 4.4: La desviación estándar de una variable aleatoria es la raíz
cuadrada positiva de su varianza.
♦♦
Notas: - La desviación estándar de la variable aleatoria X se denotará por
σX. Se colocará como subíndice el nombre de la variable
aleatoria a la que se le está calculando la desviación estándar.
- La desviación estándar es un número real positivo.
- La unidad de medida de la desviación estándar es igual a la
unidad de medida de la variable. Como ejemplo, si la variable se
mide en metros su desviación estándar se mide en metros. Este
hecho garantiza la posibilidad de poder realizar operaciones de
Rafael Díaz Página 4-9 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
suma y resta entre el valor esperado y la desviación estándar que
tendrán un significado importante en la teoría de probabilidades.
- La propiedad de medir la dispersión (o la concentración) de la
variable alrededor del valor esperado que tiene la varianza, se
traslada a la desviación estándar.
- La desviación estándar de la variable aleatoria X se calcula
utilizando la Ecuación 4.5.
σ X = + V (X ) (ec. 4.5)
4.3.2) Propiedades.
Las propiedades de la varianza y de la desviación estándar se desprenden de sus
definiciones en términos del concepto de valor esperado y de las características
particulares que tenga la función de densidad de probabilidades.
Propiedad 4.3.2.1: La varianza de una variable X se puede calcular como la
diferencia entre el valor esperado de X2 y el valor esperado de X elevado al
cuadrado.
A partir de la Ecuación 4.4 se puede escribir
[ ] [
V ( X ) = E ( X − E ( X ) ) = E X 2 − 2 XE ( X ) + (E ( X ) )
2 2
]
( )
V ( X ) = E X 2 − E [2 XE ( X )] + E (E ( X ) ) [ 2
]
aplicando las propiedades 4.2.2.3, 4.2.2 .4 y 4.2.2.5 se tiene
( ) ( )
V ( X ) = E X 2 − 2 E ( X ) E ( X ) + (E ( X ) ) = E X 2 − (E ( X ) )
2 2
♦♦
Propiedad 4.3.2.2: La varianza de una constante a es cero.
A partir de la Ecuación 4.4 se puede escribir
[ ] [ ]
V (a ) = E (a − E (a ) ) = E (a − a ) = E (0) = 0
2 2
♦♦
Propiedad 4.3.2.3: La varianza de la función g(x) = bx donde b es una constante es
igual a b2 por la varianza de X.
A partir de la Ecuación 4.4 se puede escribir
Rafael Díaz Página 4-10 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
[ ] [
V (bX ) = E (bX − E (bX ) ) = E (bX − bE ( X ) ) =
2
] 2
E [b ( X − E ( X ) ) ] = b E [( X − E ( X ) ) ]
2 2 2 2
luego
V (bX ) = b 2V ( X )
♦♦
Propiedad 4.3.2.4: La varianza de la función g(x) = a + bx donde a y b son
constantes es igual a b2 por la varianza de X.
A partir de la Ecuación 4.4 y de las Propiedades 4.3.2.2 y 4.3.2.3 se puede escribir
[ ] [
V (a + bX ) = E ((a + bX ) − E (a + bX ) ) = E (a + bX ) − (E (a + bX ))
2 2
] 2
[ ]
E a 2 + 2abX + b 2 X 2 − (a + bE ( X )) =
2
( )
a 2 + 2abE ( X ) + b 2 E ( X 2 ) − a 2 + 2abE ( X ) + b 2 (E ( X ) ) = b 2 E ( X 2 ) − b 2 (E ( X ) )
2 2
luego
V (a + bX ) = b 2V ( X )
♦♦
4.3.3) Ejemplos.
Ejemplo 4.7: Considere la variable aleatoria Z cuya función de densidad de
6
1
probabilidades está dada por f Z ( z ) = ∑ δ ( z − i ) . Hallar la varianza y la
i =1 6
desviación estándar de Z.
7
Del resultado obtenido en el Ejemplo 4.3 se tiene que E ( Z ) = , luego
2
[ ] [ ]
2
7
V ( Z ) = E (Z − E ( Z ) ) = E (Z − 3.5) = E ( Z 2 ) − =
2 2
2
6 6
49 1 49 35
∑
i =1
i 2 P{Z = i} − = ∑i2 −
4 6 i =1
=
4 12
la desviación estándar será
35
σZ = ≅ 1.708
12
♦♦
Rafael Díaz Página 4-11 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Ejemplo 4.8: Sea una variable aleatoria T cuya función de densidad de
probabilidades viene dada por el resultado del Ejemplo 3.15. Hallar la varianza y la
desviación estándar de T.
Del Ejemplo 3.15 se concluyó que
0, si t < 0
d 1
f T (t ) = FT (t ) = , si 0 ≤ t ≤ Tmax
dt T
max
0, si t > Tmax
Tmax
y del Ejemplo 4.2 se concluyó que E (T ) = , entonces a partir de la Ecuación
2
4.4 y de la Propiedad 4.3.2.1 se puede escribir
Tmax Tmax
t2 2
Tmax 1 t3 2
Tmax
) − (E (T ) ) ∫
2
V (T ) = E (T 2
= dt − = −
0
Tmax 4 Tmax 3 0 4
2
Tmax T2 T2
V (T ) = − max = max
3 4 12
y la desviación estándar será
2
Tmax T
σT = = max
12 2 3
♦♦
Ejemplo 4.9: Sea una variable aleatoria X cuya función de densidad de
x2
1 −2
probabilidades viene dada por f X ( x) = e , para todo valor de x real. Hallar
2π
el valor esperado, la varianza y la desviación estándar de X.
A partir de la Propiedad 4.2.2.1 se tiene que E(X) = 0, ya que la función de densidad
es par. Luego, de la Ecuación 4.4 y de la Propiedad 4.3.2.1 se puede escribir
∞ x2 ∞ x2
x2 − 2 1 −
V ( X ) = E( X ) = ∫ e dx = ∫x
2 2
e 2
dx
−∞ 2π 2π −∞
integrando por partes
x2
∞
∞ x2 ∞ x2
1 −
2
− 1 −
− xe + ∫ e dx = ∫ e 2 dx = 1
2
2π −∞ −∞ 2π −∞
y la desviación estándar también será igual a uno
♦♦
Rafael Díaz Página 4-12 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Ejemplo 4.10:Sea una variable aleatoria Y cuya función de densidad de
2
1 y−µ
1 −
probabilidades viene dada por f Y ( y ) = e 2 σ , para todo valor de y real; µ
σ 2π
es una constante real y σ es una constante real positiva. Hallar el valor esperado, la
varianza y la desviación estándar de Y.
A partir de la Propiedad 4.2.2.2 se tiene que E(Y) = µ, ya que la función de
densidad es simétrica respecto al valor µ. Luego, de la Ecuación 4.4 se puede
escribir
2
V (Y ) = E ((Y − E (Y ) ) ) =
∞
( y − µ )2 e − 12 yσ− µ dy
∫
2
−∞ σ 2π
y−µ
haciendo un cambio de variable x = , la integral anterior queda
σ
∞ x2
σ2 −
V (Y ) =
2π ∫e
−∞
2
dx = σ 2
y la desviación estándar será
σY = σ
♦♦
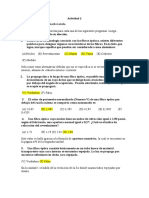
Ejemplo 4.11:Considere la variable aleatoria Y del Ejemplo 4.10 cuya función de
2
1 y−µ
1 −
densidad de probabilidades viene dada por f Y ( y ) = e 2 σ , para todo valor
σ 2π
2
de y real; donde µ es su valor esperado y σ es su varianza. Realizar la gráfica de
esta función de densidad para un valor fijo de σ y distintos valores de µ. Repita la
gráfica pero considerando un valor fijo de µ y distintos valores de σ.
Las Figuras 4.1 y 4.2 muestran las gráficas solicitadas. La Figura 4.1 hace ver que el
conocimiento del valor esperado permite ubicar la función de densidad alrededor de
ese valor; el sentido de la flecha indica el sentido en que aumenta el valor de µ. Por
otro lado, la Figura 4.2 permite observar el significado de la varianza: a mayor valor
de la varianza, mayor dispersión de la variable alrededor de su valor esperado, o
también a menor valor de la varianza mayor es la concentración de la variable
alrededor de su valor esperado; el sentido de la flecha indica el sentido en que
aumenta el valor de σ.
Rafael Díaz Página 4-13 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
♦♦
-5 -4 -3 -2 -1 0 1 2 3 4 5
Figura 4.1: fY(y) del Ejemplo 4.11 para distintos valores de µ.
-6 -4 -2 0 2 4 6
Figura 4.2: fY(y) del Ejemplo 4.11 para distintos valores de σ.
Rafael Díaz Página 4-14 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
4.4) VALOR ESPERADO CONDICIONAL.
Definición 4.5: El valor esperado condicional de una variable aleatoria es el
valor esperado considerando que la función de densidad de probabilidades es la
condicional.
♦♦
Notas: - El valor esperado condicional de una variable aleatoria se
denotará por E(X/A). Se colocará entre paréntesis el nombre de
la variable aleatoria a la que se le está calculando el valor
esperado y el evento A que condiciona su ocurrencia.
- El valor esperado condicional es un número. Ese número
pertenece al conjunto cuyos extremos son el mínimo valor y el
máximo valor que toma la variable aleatoria una vez que su
dominio ha sido restringido por el evento A.
- El valor esperado condicional de una variable aleatoria se
calcula utilizando la Ecuación 4.6.
∞
E ( X / A) = ∫ xf
−∞
X ( x / A)dx (ec. 4.6)
Definición 4.6: La varianza condicional de una variable aleatoria es la varianza
considerando que la función de densidad de probabilidades es la condicional.
♦♦
Notas: - La varianza condicional de la variable aleatoria X se denotará
por V(X/A). Se colocará entre paréntesis el nombre de la
variable a la que se le está calculando la varianza y el evento A
que condiciona su ocurrencia.
- La varianza condicional de la variable aleatoria X se calcula
utilizando la Ecuación 4.7.
( )
V ( X / A) = E X 2 / A − [E ( X / A)]
2
(ec. 4.7)
Rafael Díaz Página 4-15 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Definición 4.7: El valor esperado de una variable aleatoria se puede calcular
como una combinación lineal de los valores esperados condicionales siempre que
los eventos condicionantes conformen una partición del espacio muestral.
♦♦
Notas: - Esta definición se basa en el concepto de una partición del
espacio muestral (Definición 2.1.13 del Apéndice 2.1), en la
Definición 2.23 y en la Definición 3.12.
- El valor esperado de una variable aleatoria, a partir de los
valores esperados condicionales, se calcula utilizando la
Ecuación 4.8.
n
E ( X ) = ∑ E ( X / Ai )P{ Ai } (ec. 4.8)
i =1
Ejemplo 4.12:Considere la variable aleatoria T del Ejemplo 3.15 cuya función de
densidad de probabilidades viene dada por
0, si t < 0
1
f T (t ) = , si 0 ≤ t ≤ Tmax
Tmax
0, si t > Tmax
Hallar el valor esperado condicionado por el evento A = {Tmax/4 < T < Tmax/2}
Del resultado del Ejemplo 3.25 se puede escribir
Tmax
0, si t ≤
4
1 Tmax T
f T (t / A) = , si ≤ t ≤ max
pTmax 4 2
Tmax
0, si t >
2
Tmax
2
1
Donde p = ∫
Tmax Tmax
dt = 0.25 , entonces, a partir de la Ecuación 4.6 se tiene que
4
Tmax Tmax
2 2
4t 2t 2 3
E (T / A) = ∫ dt = = Tmax
Tmax Tmax Tmax Tmax 8
4 4
♦♦
Rafael Díaz Página 4-16 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Ejemplo 4.13:Sea una variable aleatoria X cuya función de densidad de
x2
1 −2
probabilidades viene dada por f X ( x) = e , para todo valor de x real. Hallar
2π
el valor esperado condicional y la varianza condicional cuando el evento
condicionante es B = {X > 0}.
Del resultado del Ejemplo 3.23 se puede escribir
0, si x ≤ 0
f X ( x / B) = 1
2
x
-
e 2 , si x > 0
p 2π
∞ x2
1 −2
Donde p = ∫ e dx = 0.5 , entonces, a partir de la Ecuación 4.6 se tiene que
0 2π
∞ x2
2x − 2 2
E(X / B) = ∫ e dx =
0 2π π
Para el cálculo de la varianza condicional se recurre a la Ecuación 4.7
∞ x2
( 2
)
V ( X / B ) = E X / B − [E ( X / B )] = ∫
2 2 2 −2
π
2
x e dx − = 1 −
π
2
π
0
♦♦
Rafael Díaz Página 4-17 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
4.5) MOMENTOS DE UNA VARIABLE ALEATORIA.
Existen varias definiciones asociadas al concepto de momento que tienen algún
sentido para ciertas aplicaciones de probabilidades. Estas definiciones se presentan a
continuación.
Definición 4.8: El momento n-ésimo de una variable aleatoria es el valor
esperado de la función g(x) = xn, con n ∈ N.
♦♦
Notas: - El momento n-ésimo de la variable aleatoria X se denotará por
mn.
- El momento cero de una variable aleatoria es igual a uno.
- El primer momento de una variable aleatoria es su valor
esperado.
- Si la función de densidad de una variable aleatoria es una
función par entonces el segundo momento coincide con la
varianza.
- El momento n-ésimo de una variable aleatoria se calcula
utilizando la Ecuación 4.9.
- En general, a partir de la Propiedad 4.3.2.1, la varianza de una
variable aleatoria, en términos de los momentos, se calcula
utilizando la Ecuación 4.10.
∞
mn = E X n =( ) ∫x n
f X ( x)dx (ec. 4.9)
−∞
V ( X ) = m2 − m12 (ec. 4.10)
Definición 4.9: El momento central n-ésimo con respecto al valor esperado de
una variable aleatoria es el valor esperado de la función g(x) = (X-E(X))n, para
valores de n en los números naturales.
♦♦
Notas: - El momento central n-ésimo con respecto al valor esperado de la
variable aleatoria X se denotará por µn.
- µ0 es igual a uno.
- µ1 es igual a cero.
- µ2 es igual a la varianza.
- El momento central n-ésimo con respecto al valor esperado de
una variable aleatoria se calcula utilizando la Ecuación 4.11.
( ) ∫ (x − E ( X ) )
∞
µ n = E ( X − E ( X )) =
n n
f X ( x)dx (ec. 4.11)
−∞
Rafael Díaz Página 4-18 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Definición 4.10: El momento factorial n-ésimo de una variable aleatoria es el
n
valor esperado de la función g(x) = ∏ (x − i + 1) , para valores de n en los números
i =1
naturales.
♦♦
Notas: - El momento factorial n-ésimo de la variable aleatoria X se
denotará por cn.
- c1 es igual al primer momento.
- c2 es igual al segundo momento menos el primer momento.
- El momento factorial n-ésimo de una variable aleatoria se
calcula utilizando la Ecuación 4.12.
∞
n n
c n = E ∏ ( X − i + 1) = ∫ ∏ ( X − i + 1) f X ( x)dx (ec. 4.12)
i =1 −∞ i =1
Ejemplo 4.14:Establezca una relación entre los momentos y los momentos
centrales.
A partir de la Ecuación 4.9 se puede escribir
( ) ( n n
) n−k
mn = E X n = E ( X − E ( X ) + E ( X ) ) = E ∑ ( X − E ( X ) ) (E ( X ) )
n k
k =0 k
n
( ) n
n n
mn = ∑ (E ( X ) ) E ( X − E ( X ) ) = ∑ (E ( X ) ) µ k
n−k k n−k
k =0 k k =0 k
n n
mn = ∑ m1n − k µ k
k =0 k
A partir de la Ecuación 4.11 se puede escribir
( )
n n n−k n
( )
n
µ n = E ( X − E ( X ) ) = E ∑ ( X ) (− E ( X ) ) = ∑ E X k (E ( X ) ) (− 1)
n k n−k n−k
k
k =0 k
k =0
n
n
µ n = ∑ (− 1) mk m1
n−k n−k
k =0 k
♦♦
Rafael Díaz Página 4-19 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
4.6) FUNCIÓN GENERADORA DE MOMENTOS.
En esta sección y en las dos siguientes se van a presentar unos valores esperados de
la variable aleatoria que tienen la propiedad de no ser números sino que quedan
expresados como funciones de una variable determinista.
Definición 4.11: La función generadora de momentos de una variable aleatoria es
el valor esperado de la función g(x) = etx, donde t es un parámetro real.
♦♦
Notas: - La función generadora de momentos de la variable aleatoria X
se denotará por mX(t). Se colocará como subíndice el nombre de
la variable aleatoria y entre paréntesis la variable determinista
real t.
- La función generadora de momentos de una variable aleatoria se
calcula utilizando la Ecuación 4.13.
- La Ecuación 4.13 es la Transformada Bilateral de Laplace de la
función de densidad de probabilidades, evaluada en s = -t.
∞
( ) ∫e
m X (t ) = E e tX = tx
f X ( x)dx (ec. 4.13)
−∞
Definición 4.12: La función generadora de momentos de una variable aleatoria,
como su nombre lo indica, permite conocer los momentos de esa variable.
♦♦
Notas: - Los momentos de una variable aleatoria, en términos de su
función generadora de momentos se calculan utilizando la
Ecuación 4.14.
dn
mn = m X (t ) (ec. 4.14)
dt n t =0
Ejemplo 4.14:Deducir la Ecuación 4.14.
A partir de la Ecuación 4.13 se puede escribir
( ) ∞ (tx )k ∞ E t k x k
m X (t ) = E e tX = E ∑ =∑
∞
( tk) ∞
( )tk
k ! k = 0 k! = ∑ k !
E x k
= ∑ k !
mk
k = 0 k = 0 k = 0
desarrollando algunos términos de la serie
t2 t3
m X (t ) = m0 + tm1 + m2 + m3 + ....
2! 3!
Rafael Díaz Página 4-20 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
al evaluar en t = 0 queda m X ( 0 ) = m0 = 1, al tomar la primera derivada respecto a t
d 3t 2
m X (t ) = m1 + tm2 + m3 + ....
dt 3!
d
evaluando esta derivada en t = 0 queda m X (t ) = m1
dt t =0
generalizando el resultado se obtiene
dn
m X (t ) = mn
dt n t =0
♦♦
Ejemplo 4.15:La variable aleatoria Y tiene una función de densidad de
0, si y < 0
probabilidades dada por f Y ( y ) = −λy . Hallar su función generadora
λe , si y ≥ 0
de momentos y, a partir de ella, el valor esperado y la varianza de Y.
A partir de la Ecuación 4.13 se puede escribir
∞ e − y (λ −t ) ∞
( )
mY (t ) = E e = ∫ e λe dy = λ
tY ty − λy = λ para valores de t < λ
0
− (λ − t )
0
λ − t
para conocer el valor esperado y la varianza de Y se recurre a la Ecuación 4.14
d λ λ 1
m1 = E (Y ) = = =
dt λ − t t =0 (λ − t )2 t =0 λ
d λ 2λ 2
m2 = E (Y 2 ) = =
dt (λ − t )2
(λ − t )3 = λ2
t =0 t =0
2 1 1
V (Y ) = m 2 − m12 = 2 − 2 = 2
λ λ λ
♦♦
Ejemplo 4.16:La variable aleatoria X tiene una función de densidad de
n
n
probabilidades dada por f X ( x) = ∑ p k (1 − p ) n −k δ ( x − k ) . Hallar su función
k =0 k
generadora de momentos y, a partir de ella, el valor esperado y la varianza de X.
A partir de la Ecuación 4.13 se puede escribir
Rafael Díaz Página 4-21 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
n k n
( ) ( )
n n
m X (t ) = E (e ) = ∑ p (1 − p) e = ∑ pe t (1 − p) n − k = pe t + 1 − p
n − k tk k n
tX
k =0 k k =0 k
para conocer el valor esperado y la varianza de X se recurre a la Ecuación 4.14
d
m1 = E(X) =
dt
[(
pe t + 1 − p ) ]
n
t =0
( [(
= npe t pe t + 1 − p )
n −1
]) t =0
= np
d
[ [(
m2 = E ( X 2 ) = npe t pe t + 1 − p
dt
)n −1
] = np + n(n − 1) p 2
t =0
V ( X ) = m2 − m = np + n(n − 1) p − n 2 p 2 = np (1 − p )
2
1
2
♦♦
Ejemplo 4.17:La variable aleatoria Z tiene una función de densidad de
1
, si a < z < b
probabilidades dada por f Z ( z ) = b − a . Hallar su función
0, en otros casos
generadora de momentos y, a partir de ella, el valor esperado y la varianza de Z.
A partir de la Ecuación 4.13 se puede escribir
1 e tz e tb − e ta
b b
m Z (t ) = E e = ∫ e( )
tZ 1
b−a
dz = tz
=
b − a t a (b − a )t
a
para conocer el valor esperado y la varianza de Z se recurre a la Ecuación 4.14
d e tb − e ta
e bt (bt − 1) − e at (at − 1)
m1 = E ( Z ) = =
dt (b − a )t
t =0 (b − a )t 2 t =0
al evaluar en t = 0 se consigue una indeterminación por lo que
se debe considerar el límite cuando t tiende a cero, tal que
e bt (bt − 1) − e at (at − 1) a + b
m1 = E ( Z ) = lim =
t →0 (b − a )t 2 2
d e bt (bt − 1) − e at (at − 1) b3 − a 3
m2 = E ( Z 2 ) =
=
dt (b − a )t 2 t =0 3(b − a )
2
b3 − a 3 a + b (b − a ) 2
V ( Z ) = m2 − m = 2
1 − =
3(b − a ) 2 12
♦♦
Rafael Díaz Página 4-22 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
4.7) FUNCIÓN CARACTERÍSTICA.
Definición 4.13: La función característica de una variable aleatoria es el valor
esperado de la función compleja g(x) = ejwx, donde w es un parámetro real.
♦♦
Notas: - La función característica de la variable aleatoria X se denotará
por ΦX(w). Se colocará como subíndice el nombre de la variable
aleatoria y entre paréntesis la variable determinista real w.
- La función característica es una función compleja.
- La función característica de una variable aleatoria se calcula
utilizando la Ecuación 4.15.
- La Ecuación 4.15 es la Transformada de Fourier de la función
de densidad de probabilidades, evaluada en -w.
∞
Φ X ( w) = E e ( jwX
)= ∫e jwx
f X ( x)dx (ec. 4.15)
−∞
Definición 4.14: La función característica de una variable aleatoria permite conocer
los momentos de esa variable.
♦♦
Notas: - Los momentos de una variable aleatoria, en términos de su
función característica se calculan utilizando la Ecuación 4.16.
1 dn
mn = Φ X ( w) (ec. 4.16)
jn dw n
w =0
Ejemplo 4.18:La variable aleatoria X tiene una función de densidad de
2
1 x−µ
1 −
probabilidades dada por f X ( x) = e 2 σ , para todo valor de x real. Hallar
σ 2π
su función característica y, a partir de ella, el valor esperado y la varianza de X.
A partir de la Ecuación 4.15 se puede escribir
Rafael Díaz Página 4-23 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
2
∞ 1 x−µ
( )= ∫e 1 −
σ
Φ X ( w) = E e jwX jwx
e 2 dx
−∞ σ 2π
x−µ
para resolver esta integral se recurre al cambio de variable y =
σ
1 − 2 ( y 2 −2 jwσy )
∞ 1 ∞ 1
jw ( µ +σy ) 1 − 2 y2
Φ X ( w) = ∫e
−∞ 2π
e dy = e jwµ ∫
− ∞ 2π
e dy
completando cuadrados en el exponente del integrando queda
1 − 2 ( y 2 − 2 jwσy + ( jwσ ) 2 −( jwσ ) 2 )
∞ 1 w 2σ 2
jwµ −
Φ X ( w) = e ∫ jwµ
e dy = e 2
−∞ 2π
para conocer el valor esperado y la varianza de X se recurre a la Ecuación 4.16
1 d jwµ − 2 1
w 2σ 2 w 2σ 2
jwµ −
2
m1 = E ( X ) = e = ( jµ − w σ ) e 2
=µ
j dw j
w=0 w=0
1 d
w 2σ 2
m2 = E ( X ) = 2
2
( jµ − wσ ) e
2
jwµ −
2 =σ 2 + µ2
j dw
w=0
V ( X ) = m2 − m12 = σ 2 + µ 2 − µ 2 = σ 2
♦♦
Ejemplo 4.19:La variable aleatoria R tiene una función de densidad de
∞
m k −m
probabilidades dada por f R (r ) = ∑ e δ (r − k ) . Hallar su función característica
k = 0 k!
y, a partir de ella, el valor esperado y la varianza de R.
A partir de la Ecuación 4.15 se puede escribir
∞
( )= ∫e
∞ ∞
m k −m m k − m jwk
Φ R ( w) = E e jwR jwr
∑
k = 0 k!
e δ (r − k )dr = ∑
k = 0 k!
e e
−∞
Φ R ( w) = e − m ∑
∞
(me ) jw k
jw
= e − m e me = e m ( e
jw
−1)
k! k =0
para conocer el valor esperado y la varianza de R se recurre a la Ecuación 4.16
m1 = E ( R) =
j dw
e (
1 d m ( e jw −1)
1
) jw
= (mje jw )e m ( e −1)
j
=m ( )
w=0
w= 0
1 d
m2 = E ( R 2 ) = 2 mje jw (e jw − 1) ( = m(1 + m) )
j dw w=0
V ( R) = m2 − m1 = m(1 + m) − m 2 = m
2
♦♦
Rafael Díaz Página 4-24 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
4.8) FUNCIÓN GENERADORA DE PROBABILIDADES.
Definición 4.15: La función generadora de probabilidades de una variable
aleatoria es el valor esperado de la función g(x) = zx, donde z es complejo.
♦♦
Notas: - La función generadora de probabilidades de la variable aleatoria
X se denotará por ΗX(z). Se colocará como subíndice el nombre
de la variable aleatoria y entre paréntesis la variable determinista
compleja z.
- La función generadora de probabilidades se define
exclusivamente para variables aleatorias discretas.
- La función generadora de probabilidades de una variable
aleatoria se calcula utilizando la Ecuación 4.17.
- La Ecuación 4.17 es la Transformada Z de la función de
densidad de probabilidades, evaluada en z en lugar de z-1.
∞
( ) ∫ z ∑ P{ X = k}δ ( x − k )dx = ∑ z
∞ ∞
Η X ( z) = E z X = x k
P{ X = k} (ec. 4.17)
−∞ k =0 k =0
Definición 4.16: La función generadora de probabilidades de una variable aleatoria,
como su nombre lo indica, permite conocer las probabilidades de eventos del tipo
{X = k} de esa variable.
♦♦
Notas: - Las probabilidades de eventos del tipo {X = k} de una variable
aleatoria, en términos de su función generadora de
probabilidades se calculan utilizando la Ecuación 4.18.
1 d k
P{ X = k} = Η X ( z) (ec. 4.18)
k! dz k
z =0
Rafael Díaz Página 4-25 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Ejemplo 4.20:Deducir la Ecuación 4.18.
A partir de la Ecuación 4.17 se puede escribir
∞
Η X ( z ) = ∑ z k P{ X = k} = P{ X = 0} + zP{ X = 1} + z 2 P{ X = 2} + ... + z k P{ X = k} + ...
k =0
evaluando esta expresión en z = 0 se obtiene
Η X (0) = P{ X = 0}
al tomar la primera derivada de Η X ( z )
d
Η X ( z ) = P{ X = 1} + 2 zP{ X = 2} + ... + kz k −1 P{ X = k} + ...
dz
evaluando esta expresión en z = 0 se obtiene
d
Η X ( z) = P{ X = 1}
dz z =0
al tomar la segunda derivada de Η X ( z )
d2
2
Η X ( z ) = 2 P{ X = 2} + ... + k (k − 1) z k − 2 P{ X = k} + ...
dz
evaluando esta expresión en z = 0 se obtiene
d2 1 d2
Η X ( z ) = 2 P{ X = 2} ⇒ P{ X = 2} = Η X ( z)
dz 2 z =0
2 dz 2
z =0
generalizando el proceso, al tomar la k - ésima derivada de Η X ( z )
dk
Η X ( z ) = k (k − 1)(k − 2)...2 x1P{ X = k} + ...
dz k
evaluando esta expresión en z = 0 se obtiene
dk 1 dk
Η X ( z ) = k ! P{ X = k } ⇒ P{ X = k } = Η X ( z)
dz k z =0
k ! dz k
z =0
♦♦
Definición 4.17: La función generadora de probabilidades de una variable aleatoria,
como su nombre lo indica, permite conocer los momentos factoriales de esa
variable.
♦♦
Notas: - Los momentos factoriales de una variable aleatoria, en términos
de su función generadora de probabilidades se calculan
utilizando la Ecuación 4.19.
dn
cn = Η X ( z) (ec. 4.19)
dz n z =1
Rafael Díaz Página 4-26 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Ejemplo 4.21:Deducir la Ecuación 4.19.
A partir de la Ecuación 4.17 se puede escribir
∞
Η X ( z ) = ∑ z k P{ X = k}
k =0
evaluando esta expresión en z = 1 se obtiene
Η X (1) = 1
al tomar la primera derivada de Η X ( z )
d d ∞ ∞
Η X ( z ) = ∑ z k P{ X = k} = ∑ kz k −1 P{ X = k}
dz dz k =0 k =0
evaluando esta expresión en z = 1 se obtiene
∞
d
Η X ( z ) = ∑ kP{ X = k} = c1 = m1 = E ( X )
dz z =1 k =0
al tomar la segunda derivada de Η X ( z )
d2 d ∞ k −1 ∞
dz 2
Η X ( z ) = ∑
dz k =0
kz P{ X = k } = ∑ k (k − 1) z k −2 P{ X = k}
k =0
evaluando esta expresión en z = 1 se obtiene
∞ ∞ ∞
d2
dz 2
Η X ( z ) = ∑
k = 0
k ( k − 1) P{ X = k } = ∑
k = 0
k 2
P{ X = k } − ∑
k = 0
kP{ X = k} = c 2 = m2 − m1
z =1
generalizando el proceso, al tomar la n - ésima derivada de Η X ( z )
∞
dn
dz n
Η X ( z ) = ∑
k =0
k (k − 1)(k − 2)...(k − n + 1) z k − n P{ X = k}
evaluando esta expresión en z = 1 se obtiene
∞
dn
dz n
Η X ( z ) = ∑
k = 0
k (k − 1)(k − 2)...(k − n + 1) P{ X = k} = c n
z =1
♦♦
Ejemplo 4.22:La variable aleatoria X tiene una función de densidad de
n
n
probabilidades dada por f X ( x) = ∑ p k (1 − p ) n −k δ ( x − k ) . Hallar su función
k =0 k
generadora de probabilidades y, a partir de ella, el valor esperado y la varianza de X.
A partir de la Ecuación 4.17 se puede escribir
Rafael Díaz Página 4-27 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
n n
n
Η X ( z ) = ∑ z P{ X = k} = ∑ z k p k (1 − p ) n −k
k
k =0 k =0 k
n
n
Η X ( z ) = ∑ ( pz ) (1 − p ) n −k = ( pz + 1 − p )
k n
k =0 k
para conocer el valor esperado de X hay que tomar la primera derivada de Η X ( z )
d
dz
Η X ( z) =
d
dz
( )
( pz + 1 − p )n = np( pz + 1 − p )n−1
evaluando esta expresión en z = 1 se obtiene
c1 = m1 = E ( X ) = np
tomando la segunda derivada de Η X ( z )
( )
2
d d
np ( pz + 1 − p ) = n(n − 1) p 2 ( pz + 1 − p )
n −1 n−2
2
Η X ( z) =
dz dz
evaluando esta expresión en z = 1 se obtiene
c 2 = n(n − 1) p 2 = m2 − m1
m2 = c 2 + m1 = n(n − 1) p 2 + np
la varianza de X será
V ( X ) = m2 − m12 = n(n − 1) p 2 + np − n 2 p 2 = np (1 − p )
♦♦
Rafael Díaz Página 4-28 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
4.9) INECUACIÓN DE CHEVYSHEV.
La definición de variable aleatoria y de las funciones de distribución y de densidad
refleja el comportamiento del experimento aleatorio que se está analizando. Se ha
verificado en diversas oportunidades que la forma de las funciones de distribución y
de densidad debe seguir un cierto patrón que obliga a que no todo tipo de función
puede ser considerada para este tipo de representación. En este orden de ideas, el
conocimiento del valor esperado y la varianza proporciona información adicional
acerca de la forma de estas funciones y, en consecuencia, de las probabilidades
asignadas a diversos tipos de eventos. Este tipo de información llega hasta el
extremo de indicar topes en el valor de la probabilidad de ocurrencia de ciertos
eventos para cualquier tipo de variable aleatoria.
La inecuación de Chevyschev permite conocer un límite al valor que puede tener la
probabilidad de un cierto tipo de evento independientemente de la forma de su
función de densidad de probabilidades.
Definición 4.18: Sea una variable aleatoria X de la cual sólo conocemos su valor
esperado E(X) y su varianza V(X). Sea un evento del tipo {|X-E(X)| ≤ kσX},
entonces la probabilidad de ocurrencia de este evento tiene un valor mínimo que es
una función del valor real positivo k y no depende de la forma de la función de
densidad de probabilidades de X.
♦♦
Notas: - El valor mínimo de la probabilidad del evento mencionado se
calcula utilizando el lado derecho de la Ecuación 4.20.
- La expresión 4.20 se conoce como la inecuación de Chevyschev.
1
P{| X − E ( X ) |≤ kσ X } ≥ 1 − (ec. 4.20)
k2
Rafael Díaz Página 4-29 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
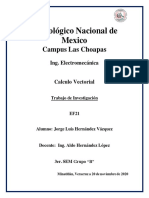
Ejemplo 4.24:Demostrar la inecuación de Chevyschev.
A partir de la Definición 4.3 se puede escribir
∞
[
V ( X ) = E ( X − E ( X )) = 2
] ∫ ( x − E ( X )) 2
f X ( x)dx
−∞
a partir de la Figura 4.3 la integral anterior se puede escribir como
E ( X ) − kσ X E ( X ) + kσ X ∞
V (X ) = ∫ ( x − E ( X )) f X ( x)dx + ∫ ( x − E ( X )) f X ( x)dx + ∫ ( x − E ( X ))
2 2 2
f X ( x)dx
−∞ E ( X ) − kσ X E ( X ) + kσ X
E ( X ) + kσ X
∫ ( x − E ( X )) f X ( x)dx ≥ 0 se puede escribir
2
en vista de que
E ( X ) − kσ X
E ( X ) − kσ X ∞
V(X) ≥ ∫ ( x − E ( X )) f X ( x)dx + ∫ ( x − E ( X )) f X ( x)dx ≥
2 2
−∞ E ( X ) + kσ X
E ( X ) − kσ X
∞ E ( X ) + kσ X
1 −
−∫∞ X ∫ ∫
2
k V (X ) f ( x ) dx + f ( x ) dx = k 2
V ( X ) f ( x ) dx
X
X
E ( X ) + kσ X E ( X ) −kσ X
la integral en el paréntesis es la probabilidad deseada, luego
V ( X ) ≥ k 2V ( X )(1 − P{|X-E(X)| ≤ kσ X })
de aqui se despeja la probabilidad deseada, obteniendo
1
P{|X-E(X)| ≤ kσ X } ≥ 1 - 2
k
♦♦
fX(x)
E(X)-kσX E(X) E(X)+kσX
Figura 4.3: Intervalos para evaluar la varianza del Ejemplo 4.24
Rafael Díaz Página 4-30 20/10/03
Introducción a la Probabilidad, los Procesos Estocásticos y la Estadística en Ingeniería
Ejemplo 4.25:Hallar la probabilidad de ocurrencia del evento {|X-E(X)| ≤ 2σX}
para distintas variables aleatorias y comparar con el valor mínimo que se obtiene al
utilizar la inecuación de Chevyschev.
Según la inecuación de Chevyschev (para k = 2), el valor mínimo de la probabilidad
del evento bajo estudio es 3/4.
Se van a considerar tres variables cuyas funciones de densidad, valores esperados y
varianzas se muestran en la Tabla 4.1.
Función de Densidad Valor Esperado Varianza P{|X-E(X)| ≤ 2σX }
0, si t < 0
1
f T (t ) = , si 0 ≤ t ≤ Tmax
Tmax 2
Tmax 1
Tmax 2 12
0, si t > Tmax
0, si y < 0 1 1
f Y ( y ) = −λy
λe , si y ≥ 0 λ λ2 0.95
2
1 x−µ
1 −
f X ( x) = e 2 σ
µ σ2 0.9545
σ 2π
Tabla 4.1: Comparación de probabilidades del Ejemplo 4.25
♦♦
4.10) PROBLEMAS PROPUESTOS.
Rafael Díaz Página 4-31 20/10/03
Potrebbero piacerti anche
- Ejercicios Resueltos de Estadística: Tema 4: ProbabilidadesDocumento52 pagineEjercicios Resueltos de Estadística: Tema 4: Probabilidadeseamtzg70% (224)
- 6 Sigma Training ManualDocumento572 pagine6 Sigma Training ManualRoberto Rosas CervantesNessuna valutazione finora
- Método de Transporte en Investigación de OperacionesDocumento11 pagineMétodo de Transporte en Investigación de OperacionesLizbeth MojicaNessuna valutazione finora
- 4.1 Economia y Diversidad Economica y 4.2 Sistemas de ProduccionDocumento15 pagine4.1 Economia y Diversidad Economica y 4.2 Sistemas de Produccionleonardo valenzuela lopezNessuna valutazione finora
- Señales AleatoriasDocumento46 pagineSeñales AleatoriasEduardo Gauss GaloisNessuna valutazione finora
- Hoja 04 Ejercicios de Probabilidad y EstadísticaDocumento14 pagineHoja 04 Ejercicios de Probabilidad y EstadísticaIsaac GarcíaNessuna valutazione finora
- 2.2 Transformadores Monofásicos Y TrifásicosDocumento12 pagine2.2 Transformadores Monofásicos Y TrifásicosJoanna Linette InfiniteeNessuna valutazione finora
- Generacion de Numeros AleatoriosDocumento27 pagineGeneracion de Numeros Aleatoriosjuan arevaloNessuna valutazione finora
- Circuitos Resistivos SimplesDocumento28 pagineCircuitos Resistivos SimplesNarly BastoNessuna valutazione finora
- Edoc - Pub - 328991217 Cap 10 Secc 10 5 Area y Longitud de Arco PDFDocumento25 pagineEdoc - Pub - 328991217 Cap 10 Secc 10 5 Area y Longitud de Arco PDFJonnyJaimesSilvaNessuna valutazione finora
- Guia Lab 12Documento11 pagineGuia Lab 12John Baltazar HonorioNessuna valutazione finora
- Sistema CarreteroDocumento3 pagineSistema CarreterozuryNessuna valutazione finora
- Unidad 3 Electricidad y ElectronicaDocumento8 pagineUnidad 3 Electricidad y ElectronicaJose Luis Castillo SanchezNessuna valutazione finora
- Distribuciones Fundamentales para El MuestreoDocumento2 pagineDistribuciones Fundamentales para El MuestreoJavis Ayala0% (1)
- Integrales Itereadas PDFDocumento9 pagineIntegrales Itereadas PDFC3BNessuna valutazione finora
- Variables Aleatorias ContinuasDocumento9 pagineVariables Aleatorias ContinuasjulianNessuna valutazione finora
- DS For WindowsDocumento19 pagineDS For WindowsMersy SCNessuna valutazione finora
- Tarea 8 de Bioestadística (QBP) 2020Documento6 pagineTarea 8 de Bioestadística (QBP) 2020BrenDa Man Cera MolNessuna valutazione finora
- EXAMEN Calculo Vectorial Unidad 4Documento1 paginaEXAMEN Calculo Vectorial Unidad 4Cristian ChavezNessuna valutazione finora
- Práctica 3 AEquipo 2 I4 ADocumento12 paginePráctica 3 AEquipo 2 I4 AAntonio Corzo RamNessuna valutazione finora
- ÁlgebraDocumento9 pagineÁlgebraXóchitl Mar P. H.Nessuna valutazione finora
- Clases Predifinidas Por .Net C#Documento3 pagineClases Predifinidas Por .Net C#EnriqueGarciaNessuna valutazione finora
- 1.3 Proceso para Elaboración Del Plan Agregado.Documento2 pagine1.3 Proceso para Elaboración Del Plan Agregado.Mahoni OrtegaNessuna valutazione finora
- Practica 01 LOO 2020-2 - Mary RuelasDocumento18 paginePractica 01 LOO 2020-2 - Mary RuelasGonzalo Segundo0% (1)
- Estadistica DescriptivaDocumento10 pagineEstadistica DescriptivaHector Armando Hernandez Dominguez0% (1)
- Futuro de La Industria NacionalDocumento16 pagineFuturo de La Industria NacionalmikeNessuna valutazione finora
- 4.2 Algoritmo de TransporteDocumento3 pagine4.2 Algoritmo de TransporteCristofer Feria0% (1)
- Concepto y Problemas de La TecnoéticaDocumento2 pagineConcepto y Problemas de La TecnoéticaBaruc Kaleb Navarro Garcia100% (2)
- Cuestionario de Unidad 1Documento6 pagineCuestionario de Unidad 1K-rloz Nava DavisNessuna valutazione finora
- INTRODUCCIÓN SimulaDocumento12 pagineINTRODUCCIÓN SimulaRosa Imelda García ChiNessuna valutazione finora
- Unidad 2Documento48 pagineUnidad 2Luis ArenasNessuna valutazione finora
- Unidad 2 Taller DeinvDocumento32 pagineUnidad 2 Taller DeinvMiguel HernandezNessuna valutazione finora
- Historia de La Investigación de OperacionesDocumento7 pagineHistoria de La Investigación de OperacionesElisa Meléndez0% (1)
- Unidad 3 Introducción A La ÓpticaDocumento11 pagineUnidad 3 Introducción A La ÓpticaIsai HernandezNessuna valutazione finora
- 2 Integracion Con Condiciones InicialesDocumento6 pagine2 Integracion Con Condiciones InicialesMiguel VelizNessuna valutazione finora
- Investigacion Documental IO 2Documento9 pagineInvestigacion Documental IO 2Jesus Alejandro Santiago GuillenNessuna valutazione finora
- Reporte Sobre Los Servicios Medio Ambientales Identificados en Las Comunidades Cercanas.Documento5 pagineReporte Sobre Los Servicios Medio Ambientales Identificados en Las Comunidades Cercanas.Cristian De La CruzNessuna valutazione finora
- 2.3 Propiedades Térmicas de Los MaterialesDocumento2 pagine2.3 Propiedades Térmicas de Los MaterialesAlondra GallardoNessuna valutazione finora
- 2.2 Flujo de Energía (I)Documento4 pagine2.2 Flujo de Energía (I)mtro.sgilNessuna valutazione finora
- Algoritmo AldepDocumento7 pagineAlgoritmo AldepmocitellyNessuna valutazione finora
- Investigación de Tipos de Parametrización (Concepto, Definiciones) PDFDocumento11 pagineInvestigación de Tipos de Parametrización (Concepto, Definiciones) PDFpedro garciaNessuna valutazione finora
- Equipo 4 (3.7, 3.8, 3.9, 3.10)Documento38 pagineEquipo 4 (3.7, 3.8, 3.9, 3.10)Bryan MoralesNessuna valutazione finora
- Teoria Triángulos Oblicuángulos1Documento3 pagineTeoria Triángulos Oblicuángulos1jorlui27412650% (2)
- Investigación Operativa II Cadenas de Markov en WinQSB 20 de Octubre Del 2017Documento4 pagineInvestigación Operativa II Cadenas de Markov en WinQSB 20 de Octubre Del 2017Juan Fernando Patricio RoldanNessuna valutazione finora
- ACTIVIDADES UNIDAD DOS-PeraltaDocumento4 pagineACTIVIDADES UNIDAD DOS-PeraltaShadey Lineth Peralta Cordova100% (1)
- El Principal Objetivo Del Pseudocódigo Es El de Representar La Solución A Un Algoritmo de La Forma Más Detallada PosibleDocumento2 pagineEl Principal Objetivo Del Pseudocódigo Es El de Representar La Solución A Un Algoritmo de La Forma Más Detallada PosibleKeinner GómezNessuna valutazione finora
- Antecedentes Historicos de La Administracion de OperacionesDocumento3 pagineAntecedentes Historicos de La Administracion de Operacionesmarilu alvarezNessuna valutazione finora
- Aplicaciones de La Ley de Ohm.Documento2 pagineAplicaciones de La Ley de Ohm.Cristian Ariel FrancoNessuna valutazione finora
- Diaz D 10-13 Diagrama Bimanual Actual JabonDocumento1 paginaDiaz D 10-13 Diagrama Bimanual Actual JabonliNessuna valutazione finora
- Actividad 2Documento2 pagineActividad 2Yeltsin Iván Camacho LamNessuna valutazione finora
- Metodo M, Dos Fases y DualDocumento23 pagineMetodo M, Dos Fases y DualAlezandro CbNessuna valutazione finora
- Medición Aproximada de Figuras AmorfasDocumento2 pagineMedición Aproximada de Figuras AmorfasLimberth VidalNessuna valutazione finora
- Cuadro de Investigacion Pura y AplicadaDocumento2 pagineCuadro de Investigacion Pura y AplicadaSaNji Antonio AlvarezNessuna valutazione finora
- Separata toleranciasProfAltunaDocumento7 pagineSeparata toleranciasProfAltunajulitomonkdaNessuna valutazione finora
- Uso de Gradiente Ef21Documento23 pagineUso de Gradiente Ef21Jorge Luis Hernandez VNessuna valutazione finora
- Unidad 2 Optimización de RedesDocumento38 pagineUnidad 2 Optimización de RedesJuan Antonio Mendez RubioNessuna valutazione finora
- 2.7 Bosquejo Del Método: 2.7.1 Determinación Del Universo y Obtención de La MuestraDocumento5 pagine2.7 Bosquejo Del Método: 2.7.1 Determinación Del Universo y Obtención de La MuestraBrandon HernandezNessuna valutazione finora
- Ensayo Algebra Lineal Unidad 5Documento11 pagineEnsayo Algebra Lineal Unidad 5Luis Alberto Graciano SimentalNessuna valutazione finora
- Ensayo 5 y 6 de Metodos NumericosDocumento19 pagineEnsayo 5 y 6 de Metodos Numericoseleazar albiterNessuna valutazione finora
- Las Oportunidades de Desarrollo Regional A Partir de Los Servicios Ambientales o Los RecursosDocumento5 pagineLas Oportunidades de Desarrollo Regional A Partir de Los Servicios Ambientales o Los Recursosjairo guerraNessuna valutazione finora
- Método Monte Carlo v1.0 P55.ipynb - ColaboratoryDocumento16 pagineMétodo Monte Carlo v1.0 P55.ipynb - ColaboratoryJonathan Linch GonzalezNessuna valutazione finora
- CDF CondicionalDocumento31 pagineCDF CondicionalJavier TutilloNessuna valutazione finora
- Aspectos Generales de La EstadísticaDocumento116 pagineAspectos Generales de La EstadísticaJonatan RamirezNessuna valutazione finora
- Cuaderno Estadística IIDocumento114 pagineCuaderno Estadística IIPabloVelezNessuna valutazione finora
- Auto Eva 3Documento19 pagineAuto Eva 3akarenfmNessuna valutazione finora
- Distribución BinomialDocumento2 pagineDistribución BinomialArturo GonzalezNessuna valutazione finora
- Inferencia EstadisticaDocumento122 pagineInferencia EstadisticaLuis SalazarNessuna valutazione finora
- Steven Nahmias - PERTDocumento10 pagineSteven Nahmias - PERTSebastian VenegasNessuna valutazione finora
- Modelado Estadistico 2023 2024Documento269 pagineModelado Estadistico 2023 2024edneibetbkNessuna valutazione finora
- Actividad10 EstadísticaDocumento17 pagineActividad10 EstadísticaJuliana Velásquez CastañoNessuna valutazione finora
- Ecuaciones Diferenciales Estocásticas y Casos de Aplicación en Finanzas PDFDocumento104 pagineEcuaciones Diferenciales Estocásticas y Casos de Aplicación en Finanzas PDFAlejandro MaloNessuna valutazione finora
- Matemáticas ActuarialesDocumento25 pagineMatemáticas ActuarialesAxel Vargas100% (2)
- Probabilidad Código 100402Documento3 pagineProbabilidad Código 100402Oscar Carreño100% (1)
- 5116 TLDocumento67 pagine5116 TLMartin GarciaNessuna valutazione finora
- Tabla de Distribución BinomialDocumento4 pagineTabla de Distribución BinomialAlexa AuquillaNessuna valutazione finora
- Introduccion HidroestadisticaDocumento15 pagineIntroduccion HidroestadisticaE Yhosmil CYNessuna valutazione finora
- Distribuciones Discretas EstadisticaDocumento15 pagineDistribuciones Discretas EstadisticaMiriamNessuna valutazione finora
- Trabajo Probabilidad en La EconomíaDocumento7 pagineTrabajo Probabilidad en La EconomíajesusNessuna valutazione finora
- Probabilidad NormalDocumento38 pagineProbabilidad NormalJuan Jesus Soria Quijaite100% (1)
- Significado Intuitivo de La ProbailidadDocumento16 pagineSignificado Intuitivo de La ProbailidadLUIS HERNAN JIMENEZ RONDONNessuna valutazione finora
- Funcion de Distribucion Conjunta de VacDocumento6 pagineFuncion de Distribucion Conjunta de VacJosé Alberto Paquiyauri OchoaNessuna valutazione finora
- Tarea 1.9 y Tarea 1.10Documento2 pagineTarea 1.9 y Tarea 1.10Evanz Gutierrez QuispeNessuna valutazione finora
- Godino y Batanero 2009 PDFDocumento24 pagineGodino y Batanero 2009 PDFCésarAugustoSantanaNessuna valutazione finora
- Tema 5Documento80 pagineTema 5Karis EllietNessuna valutazione finora
- Bioestadística y DiseñoDocumento3 pagineBioestadística y DiseñoBrenda Agustina CamposNessuna valutazione finora
- Distribuciones DisDocumento6 pagineDistribuciones Dislya2709 SiNessuna valutazione finora
- MarkowitzDocumento5 pagineMarkowitzPoope Moore RapNessuna valutazione finora
- Curso Estadistica IClase 3Documento31 pagineCurso Estadistica IClase 3Alfonso MontillaNessuna valutazione finora
- Mpes U2 A2 Lapb C3Documento15 pagineMpes U2 A2 Lapb C3Laura Pontón Becerril100% (5)