Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- 07 DonoghueIJID2017Documento6 pagine07 DonoghueIJID2017denisfr79Nessuna valutazione finora
- 06 Screening Mutations in Drug-Resistant MycobacteriuDocumento7 pagine06 Screening Mutations in Drug-Resistant Mycobacteriudenisfr79Nessuna valutazione finora
- 09 Piis1473309912702773Documento10 pagine09 Piis1473309912702773denisfr79Nessuna valutazione finora
- 10 A Comprehensive Map of Mycobacterium TuberculosisDocumento14 pagine10 A Comprehensive Map of Mycobacterium Tuberculosisdenisfr79Nessuna valutazione finora
- 02 Emergence of Additional Drug Resistance During TreDocumento10 pagine02 Emergence of Additional Drug Resistance During Tredenisfr79Nessuna valutazione finora
- 08 - Genome Res.-2012-Casali-735-45Documento12 pagine08 - Genome Res.-2012-Casali-735-45denisfr79Nessuna valutazione finora
- SD MSA-0011 (Ext) Ex-S Gundam (Recolored VerDocumento1 paginaSD MSA-0011 (Ext) Ex-S Gundam (Recolored Verdenisfr79Nessuna valutazione finora
- 03 S0213005X1170012XDocumento6 pagine03 S0213005X1170012Xdenisfr79Nessuna valutazione finora
- 01 Genome-Wide Analysis of Mycobacterium TuberculosisDocumento16 pagine01 Genome-Wide Analysis of Mycobacterium Tuberculosisdenisfr79Nessuna valutazione finora
- 05 - mmbr.00062 18 s0003Documento26 pagine05 - mmbr.00062 18 s0003denisfr79Nessuna valutazione finora
- 04 CDC 32538 DS1Documento18 pagine04 CDC 32538 DS1denisfr79Nessuna valutazione finora
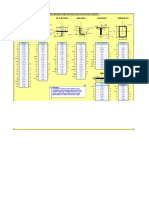
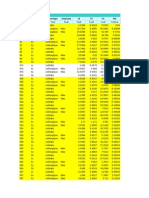
- AISC Properties ViewerDocumento3 pagineAISC Properties ViewertambokNessuna valutazione finora
- Torre Transferencia 2Documento395 pagineTorre Transferencia 2denisfr79Nessuna valutazione finora
- Detailed SD RX-78-2 Gundam VerDocumento2 pagineDetailed SD RX-78-2 Gundam Verdenisfr79Nessuna valutazione finora
- Capacity SpectrumDocumento27 pagineCapacity Spectrumdenisfr79100% (1)
- Torre Transferencia 1Documento362 pagineTorre Transferencia 1denisfr79Nessuna valutazione finora
- Tailings DamDocumento200 pagineTailings DamJainor Cabrera HuamanNessuna valutazione finora
- Foundation Analysis and DesignDocumento32 pagineFoundation Analysis and DesignvbisketiNessuna valutazione finora
- Tubo Astm A53 PDFDocumento2 pagineTubo Astm A53 PDFMelissa MccoyNessuna valutazione finora
- Re Acci OnesDocumento13 pagineRe Acci Onesdenisfr79Nessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Laxen 1984Documento24 pagineLaxen 1984jhoseferNessuna valutazione finora
- Tata SteelDocumento32 pagineTata Steelpatrik710Nessuna valutazione finora
- Chapter-4 Profile of Sample UnitsDocumento36 pagineChapter-4 Profile of Sample UnitsMarco RegunayanNessuna valutazione finora
- Copper Process EngineeringDocumento36 pagineCopper Process EngineeringJeromeNessuna valutazione finora
- Beneficiation Plants and Pelletizing Plants For Utilizing Low Grade Iron OreDocumento8 pagineBeneficiation Plants and Pelletizing Plants For Utilizing Low Grade Iron Oreattiori fabriceNessuna valutazione finora
- 5K5SSWHDocumento8 pagine5K5SSWHGustavo GagliardoNessuna valutazione finora
- 157 Rail Grinder Operation Manual PDFDocumento34 pagine157 Rail Grinder Operation Manual PDFWiyono De JavaNessuna valutazione finora
- Taetigkeitsbericht PDFDocumento168 pagineTaetigkeitsbericht PDFamk2009100% (1)
- Linear and Nonlinear Particle Breakage Processes inDocumento11 pagineLinear and Nonlinear Particle Breakage Processes inFrancisco CampbellNessuna valutazione finora
- CEREC Premium 4.5 Bur Chart 06.28.2016 PDFDocumento1 paginaCEREC Premium 4.5 Bur Chart 06.28.2016 PDFSnezhana StefanovskaNessuna valutazione finora
- DEM Modelling of Liner Evolution and Its Influence On Grinding Rate in Ball MillsDocumento11 pagineDEM Modelling of Liner Evolution and Its Influence On Grinding Rate in Ball MillsAlex vilcaNessuna valutazione finora
- Toka Tindung Ore Reserve Estimate 30 June 2016Documento46 pagineToka Tindung Ore Reserve Estimate 30 June 2016Zulkifly Rumba A SingkuNessuna valutazione finora
- The Effect of Particle Breakage Mechanisms During Regrinding On The Subsequent Cleaner Flotation 2014 Minerals EngineeringDocumento8 pagineThe Effect of Particle Breakage Mechanisms During Regrinding On The Subsequent Cleaner Flotation 2014 Minerals EngineeringW ZuoNessuna valutazione finora
- Types and Characteristics of Common Grinding Circuit Flow SheetsDocumento9 pagineTypes and Characteristics of Common Grinding Circuit Flow SheetsJoseluis Campean SedanoNessuna valutazione finora
- Catalog of Crusher and Grinding MillDocumento24 pagineCatalog of Crusher and Grinding Millsaleem2412100% (1)
- Sirwana Jemal UpdatedDocumento32 pagineSirwana Jemal UpdatedWOndewosen AbelNessuna valutazione finora
- Vibrating Screen Experimental ManualDocumento16 pagineVibrating Screen Experimental ManualShoaib Pathan50% (2)
- Autogenous Mill Application: Case StudyDocumento16 pagineAutogenous Mill Application: Case StudyRodger OlynNessuna valutazione finora
- SAG Mill Liner StudyDocumento109 pagineSAG Mill Liner StudyAclariont100% (1)
- Employee AbsenteeismDocumento86 pagineEmployee AbsenteeismT S Kumar Kumar100% (1)
- Performance Evaluation of Vertical Roller Mill in Cement Grinding: Case Study ESCH Cement PlantDocumento8 paginePerformance Evaluation of Vertical Roller Mill in Cement Grinding: Case Study ESCH Cement PlantSohail AhmedNessuna valutazione finora
- Std-31.vda 16 TableDocumento33 pagineStd-31.vda 16 TableSeda ErsoyNessuna valutazione finora
- Energy Analysis of A Wheat Processing Plant in Nigeria: January 2014Documento7 pagineEnergy Analysis of A Wheat Processing Plant in Nigeria: January 2014Mădălina ȘtefanNessuna valutazione finora
- 6.1. Principles of Size ReductionDocumento2 pagine6.1. Principles of Size ReductionXxxNessuna valutazione finora
- Milling HandoutDocumento6 pagineMilling HandoutRica de los SantosNessuna valutazione finora
- Fluidized Bed Jet MillDocumento5 pagineFluidized Bed Jet Milln73686861Nessuna valutazione finora
- Manuf Lec Finals PDFDocumento35 pagineManuf Lec Finals PDFRaizane Sky PalecNessuna valutazione finora
- Temple Mine Survey (2007)Documento86 pagineTemple Mine Survey (2007)Welsh Mines Preservation TrustNessuna valutazione finora
- Lime Systems - Brochure PDFDocumento32 pagineLime Systems - Brochure PDFRomeu Branco Simões0% (1)
- AITIKAUTOMATIONDocumento7 pagineAITIKAUTOMATIONCherezade Karine Saud SotoNessuna valutazione finora