Potrebbero piacerti anche
- Taller de Calculo II. SolucionDocumento23 pagineTaller de Calculo II. SolucionMateo Ortega PalenciaNessuna valutazione finora
- Capítulo IDocumento45 pagineCapítulo IIng Ignacio Rojo GastelumNessuna valutazione finora
- Vector DesplazamientoDocumento7 pagineVector DesplazamientoFer Nanda VelascoNessuna valutazione finora
- Transformacion Lineal 1Documento12 pagineTransformacion Lineal 1ERNESTO OCHOANessuna valutazione finora
- 1.6. - Calculo de Flujo Uniforme en Canales - Hidráulica de Canales - 6A - Edgar Álvarez MartínezDocumento9 pagine1.6. - Calculo de Flujo Uniforme en Canales - Hidráulica de Canales - 6A - Edgar Álvarez MartínezEdgar ÁlvarezNessuna valutazione finora
- 3.4 Diferencias y Ventajas ComparativasDocumento5 pagine3.4 Diferencias y Ventajas ComparativasMayo Diaz NicolasaNessuna valutazione finora
- Momento de Inercia de Un ÁreaDocumento14 pagineMomento de Inercia de Un ÁreaFreddy Vargas50% (2)
- 1.6.-Ejercicios Momentos de Inercia Secciones Ingeniería.Documento6 pagine1.6.-Ejercicios Momentos de Inercia Secciones Ingeniería.Grupo ByrNessuna valutazione finora
- EDP Alpicado en CIVILDocumento23 pagineEDP Alpicado en CIVILHERMINIO JAVIER LAURANessuna valutazione finora
- 1 Definición y Origen de Los Números ComplejosDocumento6 pagine1 Definición y Origen de Los Números ComplejosNashe OsoNessuna valutazione finora
- Métodos NuméricosDocumento2 pagineMétodos NuméricosSalvador CruzNessuna valutazione finora
- Tecnológico Nacional de México Instituto Tecnológico de TapachulaDocumento21 pagineTecnológico Nacional de México Instituto Tecnológico de Tapachulayetter moralesNessuna valutazione finora
- Método de JacobiDocumento11 pagineMétodo de JacobiJuan Carlos Serrano MedranoNessuna valutazione finora
- Operaciones Con TensoresDocumento7 pagineOperaciones Con TensoresRODRÍGUEZ ARCIGA DIEGONessuna valutazione finora
- TEMA 4. FLUJO GRADUALMENTE VARIADO (v.04.02.20) ADocumento14 pagineTEMA 4. FLUJO GRADUALMENTE VARIADO (v.04.02.20) Ajosue saldaña bautistaNessuna valutazione finora
- Gases Ideales y Sus LeyesDocumento9 pagineGases Ideales y Sus LeyesRAUL FERREYRA GARCIANessuna valutazione finora
- 4.3 Determinacion de Rumbos y FechadosDocumento5 pagine4.3 Determinacion de Rumbos y FechadosEduardoNessuna valutazione finora
- Concepto y Tipología de ModelosDocumento3 pagineConcepto y Tipología de ModelosGloria YamNessuna valutazione finora
- Estática. Método de SeccionesDocumento14 pagineEstática. Método de SeccionesJesus Guadalupe Garcia MendozaNessuna valutazione finora
- 01 - Sistema de Fuerzas - EstáticaDocumento2 pagine01 - Sistema de Fuerzas - EstáticaKennet Edyson Mamani ZeaNessuna valutazione finora
- 2.1 Control Estadistico Resistencia ConcretoDocumento12 pagine2.1 Control Estadistico Resistencia ConcretoWillian Lovon CondeNessuna valutazione finora
- G3C - 5.2 Núcleo e Imagen de Una Transformación Lineal.Documento13 pagineG3C - 5.2 Núcleo e Imagen de Una Transformación Lineal.Daniel CisnerosNessuna valutazione finora
- pc1 Meca Compendio ListoDocumento21 paginepc1 Meca Compendio ListoGONZALO ARTURO BENITES PAREDESNessuna valutazione finora
- Movimiento CurvilineoDocumento6 pagineMovimiento CurvilineoDarwin M. Pazo EcheNessuna valutazione finora
- Interpolacion LagrangeDocumento26 pagineInterpolacion LagrangeDatmara EspañaNessuna valutazione finora
- 1.17.-Ejercicios Momentos de Inercia Secciones Ingeniería.Documento2 pagine1.17.-Ejercicios Momentos de Inercia Secciones Ingeniería.Grupo ByrNessuna valutazione finora
- Metodos de Obtener Las Areas Apartir de Productos CruzadosDocumento3 pagineMetodos de Obtener Las Areas Apartir de Productos CruzadosKarina CortezNessuna valutazione finora
- BarrasDocumento4 pagineBarrasEdwin Unlimi TedNessuna valutazione finora
- Integrales MúltiplesDocumento3 pagineIntegrales MúltiplesAlejandro PerdomoNessuna valutazione finora
- Conservacion y Transporte de Muestras de Suelos12Documento3 pagineConservacion y Transporte de Muestras de Suelos12Max Peralta ChuchonNessuna valutazione finora
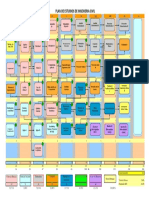
- Flujograma CivilDocumento1 paginaFlujograma CivilMichael BonillaNessuna valutazione finora
- Ejercicios en Ingenieria CivilDocumento26 pagineEjercicios en Ingenieria CivilOlivers ÁngelNessuna valutazione finora
- Cuadro Comparativo de Las Ecuaciones DiferencialesDocumento2 pagineCuadro Comparativo de Las Ecuaciones DiferencialesPablo Eduardo Díaz HernándezNessuna valutazione finora
- Hardware Software Ing CivilDocumento26 pagineHardware Software Ing CivilBenjamin Mendoza BagliettoNessuna valutazione finora
- Unidad II Metodos de SondeosDocumento16 pagineUnidad II Metodos de SondeosDgsuspe BenNessuna valutazione finora
- Reporte de Práctica # 1Documento3 pagineReporte de Práctica # 1Victor CalvilloNessuna valutazione finora
- Dinámica Unidad 2.1 Cinética de PartículasDocumento11 pagineDinámica Unidad 2.1 Cinética de PartículasIwjshsNessuna valutazione finora
- Intemperismo, Erosión y SueloDocumento14 pagineIntemperismo, Erosión y Suelogustavo adolfo ramos mendezNessuna valutazione finora
- Métodos NuméricosDocumento7 pagineMétodos NuméricosMassiel Macías MoralesNessuna valutazione finora
- Simetría: Sección 10.3 Coordenadas PolaresDocumento1 paginaSimetría: Sección 10.3 Coordenadas PolaresJavier LeónNessuna valutazione finora
- Sistemas de Fuerzas Equivalentes TEORIADocumento29 pagineSistemas de Fuerzas Equivalentes TEORIARosales Villegas AdairNessuna valutazione finora
- Interpretación Geométrica de Los Sistema de Ecuaciones LinealesDocumento13 pagineInterpretación Geométrica de Los Sistema de Ecuaciones LinealesHipolito Olejnizak0% (1)
- Derivada Direccional y GradienteDocumento2 pagineDerivada Direccional y GradienteMarisa CarattoliNessuna valutazione finora
- Sistemas de Ecuaciones Diferenciales LinealesDocumento10 pagineSistemas de Ecuaciones Diferenciales LinealesangelNessuna valutazione finora
- Desarrollo Sustentable Unidad 4 PACHECO KANTUN ULISES ING CIVIL 3BDocumento57 pagineDesarrollo Sustentable Unidad 4 PACHECO KANTUN ULISES ING CIVIL 3Bulises pachecoNessuna valutazione finora
- Unidad 2 - FMMCDocumento16 pagineUnidad 2 - FMMCAlvaro HernandezNessuna valutazione finora
- Marco de Aplicación de La Teoría CuánticaDocumento159 pagineMarco de Aplicación de La Teoría Cuánticamary ramirezNessuna valutazione finora
- Toma de Muestra InalteradaDocumento6 pagineToma de Muestra InalteradaOscar Armando Mamani NinaNessuna valutazione finora
- CIVIL Probabilidad y Estadistica PDFDocumento10 pagineCIVIL Probabilidad y Estadistica PDFSergioNessuna valutazione finora
- Energia de DeformacionDocumento18 pagineEnergia de Deformacionkarla barrigaNessuna valutazione finora
- Notación Indicial y Operaciones de TensoresDocumento21 pagineNotación Indicial y Operaciones de TensoresEduardo Morales EspondaNessuna valutazione finora
- Integracion de Los Sistemas de TransporteDocumento50 pagineIntegracion de Los Sistemas de TransporteRodolfo Omar Hernandez EscobarNessuna valutazione finora
- Geología Unidad 2Documento29 pagineGeología Unidad 2lopezNessuna valutazione finora
- Rotacion en Torno A Un Punto FijoDocumento24 pagineRotacion en Torno A Un Punto FijoYasmani VitulasNessuna valutazione finora
- Investigación - Movimiento CurvilineoDocumento7 pagineInvestigación - Movimiento CurvilineoJOSUE HUERTANessuna valutazione finora
- Estática InerciaDocumento14 pagineEstática InerciaRicardoNessuna valutazione finora
- Doc.20 - Programa de Montos Mensuales de Ejecución de Los TrabajosDocumento3 pagineDoc.20 - Programa de Montos Mensuales de Ejecución de Los Trabajosirineo miranda moreno100% (1)
- Radio de Giro de Una Área, Teorema de Steiner, Momento de Áreas CompuestasDocumento11 pagineRadio de Giro de Una Área, Teorema de Steiner, Momento de Áreas CompuestasSaussure Fer CcoriNessuna valutazione finora
- Vectores PropiosDocumento5 pagineVectores Propiosjuan de diosNessuna valutazione finora
- Tarea Algebra Lineal 20autovaloresautovectoresdiagonalizacionDocumento8 pagineTarea Algebra Lineal 20autovaloresautovectoresdiagonalizacionMauricio Acevedo GarciaNessuna valutazione finora
- Apocalipsis Notas y Bosquejos ATB PDFDocumento6 pagineApocalipsis Notas y Bosquejos ATB PDFMarvin H. ReinosoNessuna valutazione finora
- Listado de MaterialesDocumento2 pagineListado de MaterialesMarvin H. ReinosoNessuna valutazione finora
- Cleopatra PDFDocumento1 paginaCleopatra PDFMarvin H. ReinosoNessuna valutazione finora
- Analisis Diseño y Refuerzo Estructural Empleando Disipadores de Energia - v2019 PDFDocumento175 pagineAnalisis Diseño y Refuerzo Estructural Empleando Disipadores de Energia - v2019 PDFMarvin H. ReinosoNessuna valutazione finora
- Introduccion Al Concreto PresforzadoDocumento75 pagineIntroduccion Al Concreto PresforzadoMarvin H. Reinoso100% (1)
- Historia de María Jones Sobre La BibliaDocumento1 paginaHistoria de María Jones Sobre La BibliaMarvin H. ReinosoNessuna valutazione finora
- Normas para El Diseño y Construcción de Puentes Edición 2013 AGIESDocumento70 pagineNormas para El Diseño y Construcción de Puentes Edición 2013 AGIESMarvin H. ReinosoNessuna valutazione finora
- 4.1.3 Manejo de Las EmocionesDocumento5 pagine4.1.3 Manejo de Las EmocionesRichard Karl Albino Soto100% (1)
- Imagen Profesional-Primer ParcialDocumento31 pagineImagen Profesional-Primer Parcialerika pardo 1518Nessuna valutazione finora
- Actividad Integradora 6 Problemas SocialesDocumento11 pagineActividad Integradora 6 Problemas SocialesJorge Ortega83% (72)
- Seifert, Josef - Superación Del Escándalo de La Razón Pura (Kant)Documento136 pagineSeifert, Josef - Superación Del Escándalo de La Razón Pura (Kant)df100% (3)
- 08cap6-Diseño de Muros de ContenciónDocumento20 pagine08cap6-Diseño de Muros de ContenciónJules Meza OchoaNessuna valutazione finora
- 2 La Autoridad Docente en Cuestión. ArtículosDocumento6 pagine2 La Autoridad Docente en Cuestión. Artículosthomas ibarraNessuna valutazione finora
- Estándares para Establecimientos de Larga EstadíaDocumento395 pagineEstándares para Establecimientos de Larga EstadíaMaybe Rebolledo YañezNessuna valutazione finora
- ParteDocumento10 pagineParteAnonymous piJqXjTjYhNessuna valutazione finora
- La Ética y Su Fundamentación - Qué Son Los ValoresDocumento3 pagineLa Ética y Su Fundamentación - Qué Son Los ValoresNaddie HFNessuna valutazione finora
- Bonorino y Peña Filosofía Del DerechoDocumento31 pagineBonorino y Peña Filosofía Del DerechoMelanieNessuna valutazione finora
- Introduccion Al Comportamiento OrganizacionalDocumento8 pagineIntroduccion Al Comportamiento OrganizacionalCesia Pitones ChanNessuna valutazione finora
- Los Manuscritos de Geenom 2 - El Hombre Célula CósmicaDocumento203 pagineLos Manuscritos de Geenom 2 - El Hombre Célula CósmicaIvanna Romina100% (1)
- Lorca Apuntes Todo en PDFDocumento42 pagineLorca Apuntes Todo en PDFFran Macian Lledo100% (1)
- Discurso 9 de JulioDocumento2 pagineDiscurso 9 de JulioInfernal85Nessuna valutazione finora
- El Método de VogelDocumento6 pagineEl Método de VogelMayriita JaquelineNessuna valutazione finora
- Teoría de TransiciónDocumento2 pagineTeoría de TransiciónBilytahh Bernal FernándezNessuna valutazione finora
- Silabo Atencion MaternaDocumento13 pagineSilabo Atencion MaternaKaterin Reategui Tuanama86% (7)
- Reducción Al Absurdo Por Asignación de Valores de Veritativos - Pedro RamosDocumento8 pagineReducción Al Absurdo Por Asignación de Valores de Veritativos - Pedro RamosGerry LVNessuna valutazione finora
- Proyecto AFT 2014-15Documento18 pagineProyecto AFT 2014-15jeague09Nessuna valutazione finora
- La Estructura MíticaDocumento3 pagineLa Estructura MíticaErvinNessuna valutazione finora
- Plan de Clase de Psicologia Evolutiva Del Niños 2019Documento5 paginePlan de Clase de Psicologia Evolutiva Del Niños 2019Yesenia Yadira Morales LopezNessuna valutazione finora
- Folleto Mecanismos de Participacion CiudadanaDocumento2 pagineFolleto Mecanismos de Participacion Ciudadananegra0120735640% (5)
- Escribir Cuentos Por Flannery O'ConnorDocumento3 pagineEscribir Cuentos Por Flannery O'ConnorluisagomezlNessuna valutazione finora
- Apuntes de Elasticidad y Resistencia de Materiales - Santiago Torrano & D. Herrero PerezDocumento239 pagineApuntes de Elasticidad y Resistencia de Materiales - Santiago Torrano & D. Herrero PerezAlexander Yedra100% (1)
- Metodologia de La InvestigaciónDocumento19 pagineMetodologia de La InvestigaciónsofisleoNessuna valutazione finora
- El Socialimperialismo Soviético Génesis y Colapso, Vincent Gouysse Bitácora de Un NICARAGÜENSEDocumento101 pagineEl Socialimperialismo Soviético Génesis y Colapso, Vincent Gouysse Bitácora de Un NICARAGÜENSEAlberto Mujica TapiaNessuna valutazione finora
- Metodologia de InvestigaciónDocumento48 pagineMetodologia de InvestigaciónSimón BolívarNessuna valutazione finora
- Tipos de EvaluaciónDocumento11 pagineTipos de EvaluaciónFernando MoralesNessuna valutazione finora
- Triptico 2015 - 3Documento2 pagineTriptico 2015 - 3Mark Valvas RoblesNessuna valutazione finora
- Leon Tolstoi - CartasDocumento121 pagineLeon Tolstoi - CartasFran JavierNessuna valutazione finora