Potrebbero piacerti anche
- Manipulacion y Psicologia Oscura - Alejandro MendozaDocumento123 pagineManipulacion y Psicologia Oscura - Alejandro Mendozavictoria giovanna93% (224)
- ONYX - Series - Curso Intermedio 2018 TraducidoDocumento21 pagineONYX - Series - Curso Intermedio 2018 TraducidoMauricioFernández100% (1)
- Cables CalefactoresDocumento60 pagineCables CalefactoresMauricioFernándezNessuna valutazione finora
- ES - Ditec Valor Manual Técnico PDFDocumento24 pagineES - Ditec Valor Manual Técnico PDFLEONARDO MANOSALVA CUETONessuna valutazione finora
- Manual Conociendo Mi Liquidacion de SueldoDocumento12 pagineManual Conociendo Mi Liquidacion de SueldoJavier FuentesNessuna valutazione finora
- 15090SPDocumento88 pagine15090SPRegina OrtízNessuna valutazione finora
- Cables CalefactoresDocumento60 pagineCables CalefactoresMauricioFernándezNessuna valutazione finora
- La biofotónica y sus aplicaciones para la saludDocumento8 pagineLa biofotónica y sus aplicaciones para la saludAlimentos La FriquesaNessuna valutazione finora
- Guia 1Documento9 pagineGuia 1MauricioFernándezNessuna valutazione finora
- Informe Rectificador ControladoDocumento27 pagineInforme Rectificador ControladoMauricioFernándezNessuna valutazione finora
- Ansul r-102Documento3 pagineAnsul r-102MauricioFernándezNessuna valutazione finora
- Amplificador de ConmiutacionDocumento1 paginaAmplificador de ConmiutacionMauricioFernándezNessuna valutazione finora
- Presentación Marcas y ClientesDocumento2 paginePresentación Marcas y ClientesMauricioFernándezNessuna valutazione finora
- SIG o ERPDocumento17 pagineSIG o ERPMauricioFernándezNessuna valutazione finora
- Informe Circuitos de Disparo (E.P.2)Documento17 pagineInforme Circuitos de Disparo (E.P.2)MauricioFernándezNessuna valutazione finora
- Disparo de SCRDocumento62 pagineDisparo de SCRMauricioFernández100% (1)
- Presentación SEW EurodriveDocumento149 paginePresentación SEW Eurodriveeric666999100% (1)
- Domotica - Hacia El Hogar DigitalDocumento31 pagineDomotica - Hacia El Hogar DigitalMauricioFernándezNessuna valutazione finora
- Control y Programacion Del RobotDocumento110 pagineControl y Programacion Del Robotvictor1122Nessuna valutazione finora
- Tutorial Red ProfibusDocumento35 pagineTutorial Red Profibus24ava100% (1)
- Analogías de Función de TransferenciaDocumento10 pagineAnalogías de Función de TransferenciaMauricioFernándezNessuna valutazione finora
- Manual CCS EspañolDocumento70 pagineManual CCS Españoljkfran50% (4)
- Habilitacion Avionica Tma 2Documento34 pagineHabilitacion Avionica Tma 2Gustavo Silva AeEngNessuna valutazione finora
- Proyecto de Instalación Solar Fotovoltaica en El Departamento de Ingeniería Eléctrica de La Universidad de Santiago de ChileDocumento237 pagineProyecto de Instalación Solar Fotovoltaica en El Departamento de Ingeniería Eléctrica de La Universidad de Santiago de ChileCarlos Matamoro BurgosNessuna valutazione finora
- Tr1-Chasis y CarroceríaDocumento6 pagineTr1-Chasis y CarroceríaAldair Hurtado MedinaNessuna valutazione finora
- Circuito rectificador de diodo: análisis y simulaciónDocumento4 pagineCircuito rectificador de diodo: análisis y simulaciónPaul AlexanderNessuna valutazione finora
- Septiembre 2016Documento9 pagineSeptiembre 2016Yassine El BarakyNessuna valutazione finora
- Fuentes de Alimentación - Fuente Fija RegulableDocumento54 pagineFuentes de Alimentación - Fuente Fija RegulableianpixuNessuna valutazione finora
- Practica de Rmo y RocDocumento4 paginePractica de Rmo y Roccristal lamedaNessuna valutazione finora
- Comunicaciones Analogas PDFDocumento229 pagineComunicaciones Analogas PDFJuancarlos ArrietaNessuna valutazione finora
- Práctico de ElectricidadDocumento5 paginePráctico de ElectricidadantmguilleNessuna valutazione finora
- Reactancia Capacitiva: Definición y CálculoDocumento3 pagineReactancia Capacitiva: Definición y Cálculojuan marceloNessuna valutazione finora
- Transmisor FM miniaturaDocumento7 pagineTransmisor FM miniaturaNewby DownNessuna valutazione finora
- PRACTICAS Mec 1 EMPALMESDocumento20 paginePRACTICAS Mec 1 EMPALMESAcosta Carina FabianaNessuna valutazione finora
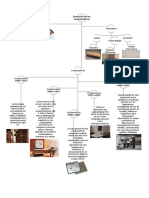
- Evolución computadoras desde ábaco a microprocesadorDocumento1 paginaEvolución computadoras desde ábaco a microprocesadorكورتيز ريبيكاNessuna valutazione finora
- Guia 1 La Pantalla y Su ClasificaionDocumento2 pagineGuia 1 La Pantalla y Su ClasificaionMariana Rengifo MontañoNessuna valutazione finora
- SERGIO RENTERIA Transformador FlybackDocumento6 pagineSERGIO RENTERIA Transformador Flybacksergio renteria santanaNessuna valutazione finora
- Código de Colores de Las ResistenciasDocumento3 pagineCódigo de Colores de Las ResistenciasRuisu Shirayuki Yūka NaNessuna valutazione finora
- 6.preparatorio2 Jonathan NaranjoDocumento4 pagine6.preparatorio2 Jonathan NaranjoJonathan Alexander Naranjo AguirreNessuna valutazione finora
- ACFrOgD Qec9c4an9WsS8ofV6xn8m92wpTS6o62m4uzEa4a6nOelnvKoV3cTYpHH1nmyvOkNXlMAZXF Wpl3synO3yHAHrRSTdEF5Fl2SR1iHKAeA3Unso6Hvk5dc-c PDFDocumento88 pagineACFrOgD Qec9c4an9WsS8ofV6xn8m92wpTS6o62m4uzEa4a6nOelnvKoV3cTYpHH1nmyvOkNXlMAZXF Wpl3synO3yHAHrRSTdEF5Fl2SR1iHKAeA3Unso6Hvk5dc-c PDFMiguel Angel Lopez JimenezNessuna valutazione finora
- Cristales AmorfosDocumento8 pagineCristales AmorfosWilly Palomino RojasNessuna valutazione finora
- Ocsiladores Con CristalDocumento6 pagineOcsiladores Con CristalNelson Valencia peñaNessuna valutazione finora
- Materiales CerámicosDocumento7 pagineMateriales CerámicosTrenger Enghert Diaz GreenNessuna valutazione finora
- EsmeriladoDocumento39 pagineEsmeriladoJuan David Suarez Tejada100% (1)
- DigitalesDocumento14 pagineDigitalesChristian LímacoNessuna valutazione finora
- 10 Analisis Senoidal Por FasoresDocumento36 pagine10 Analisis Senoidal Por FasoresJhan RamirezNessuna valutazione finora
- SYC Catalogo PDFDocumento149 pagineSYC Catalogo PDFNaciConSolNessuna valutazione finora
- 4.marco TeóricoDocumento7 pagine4.marco TeóricoMauricio Parada ZuñigaNessuna valutazione finora
- Diodos Zener y AplicacionesDocumento3 pagineDiodos Zener y Aplicacionesayde_371100% (1)
- Contador GeigerDocumento27 pagineContador GeigerSteven Mejia NiñoNessuna valutazione finora
- GrafenoDocumento21 pagineGrafenoguillepalou100% (2)
- Electronica 1Documento11 pagineElectronica 1JonathanDavidNessuna valutazione finora