Potrebbero piacerti anche
- Time Is MoneyDocumento18 pagineTime Is Moneytradebullstrade1999Nessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Topic 1 Notes PDFDocumento25 pagineTopic 1 Notes PDFNkhandu S M WilliamsNessuna valutazione finora
- Autoregressive Conditional Duration ModeDocumento41 pagineAutoregressive Conditional Duration ModeAnalyticNessuna valutazione finora
- On Simulating Point Processes Based On Efficient AlgorithmsDocumento8 pagineOn Simulating Point Processes Based On Efficient AlgorithmsTI Journals PublishingNessuna valutazione finora
- General Stochastic Processes in the Theory of QueuesDa EverandGeneral Stochastic Processes in the Theory of QueuesNessuna valutazione finora
- On Transient Regenerative ProcessesDocumento26 pagineOn Transient Regenerative ProcessesTatiana GonzalezNessuna valutazione finora
- Stochastic Processes, It O Calculus, and Applications in EconomicsDocumento18 pagineStochastic Processes, It O Calculus, and Applications in EconomicsttlphuongNessuna valutazione finora
- 1 s2.0 S0304414918301418 MainDocumento44 pagine1 s2.0 S0304414918301418 MainMahendra PerdanaNessuna valutazione finora
- Black-Scholes With JumpDocumento20 pagineBlack-Scholes With Jumpxi yanNessuna valutazione finora
- Compound Poisson Process PDFDocumento12 pagineCompound Poisson Process PDFJan Christopher D. MendozaNessuna valutazione finora
- Chapter Six Stochastic Hydrology 5 Stochastic Hydrology 5.4: Engineering Hydrology Lecture NoteDocumento24 pagineChapter Six Stochastic Hydrology 5 Stochastic Hydrology 5.4: Engineering Hydrology Lecture NoteKefene GurmessaNessuna valutazione finora
- Poisson Processes and Jump Diffusion ModelDocumento13 paginePoisson Processes and Jump Diffusion ModellycancapitalNessuna valutazione finora
- Advanced Derivatives Pricing - 04Documento34 pagineAdvanced Derivatives Pricing - 04JunhyNessuna valutazione finora
- Deterministic Chaos in Economic Processes Modeling: Nina Siemieniuk Tomasz SiemieniukDocumento12 pagineDeterministic Chaos in Economic Processes Modeling: Nina Siemieniuk Tomasz SiemieniukoscarNessuna valutazione finora
- Time-Frequency Analysis of Locally Stationary Hawkes ProcessesDocumento31 pagineTime-Frequency Analysis of Locally Stationary Hawkes ProcessesPerson PersonsNessuna valutazione finora
- Two-Time Logistic MapDocumento9 pagineTwo-Time Logistic Mapfmunteanu_5Nessuna valutazione finora
- MIT - Stochastic ProcDocumento88 pagineMIT - Stochastic ProccosmicduckNessuna valutazione finora
- Entropy: Entropy, Age and Time OperatorDocumento18 pagineEntropy: Entropy, Age and Time OperatorEsterina CelamiNessuna valutazione finora
- Delay Economic 1Documento1 paginaDelay Economic 1Alex CruzNessuna valutazione finora
- Multi Echelon HandoutDocumento42 pagineMulti Echelon HandoutDidier HuntjensNessuna valutazione finora
- A Brief Introduction To Some Simple Stochastic Processes: Benjamin LindnerDocumento28 pagineA Brief Introduction To Some Simple Stochastic Processes: Benjamin Lindnersahin04Nessuna valutazione finora
- Module 5 Introduction To Stochastic Processes Eec605Documento89 pagineModule 5 Introduction To Stochastic Processes Eec605daniel developerNessuna valutazione finora
- A Self-Limiting Hawkes Process: Interpretation, Estimation, and Use in Crime ModelingDocumento8 pagineA Self-Limiting Hawkes Process: Interpretation, Estimation, and Use in Crime ModelingJohn SmithNessuna valutazione finora
- 2013 - (Marcin Daszkiewicz) Quantum Mechanics of Many Particles Defined On Twisted N-Enlarged Newton-Hooke Space-TimesDocumento13 pagine2013 - (Marcin Daszkiewicz) Quantum Mechanics of Many Particles Defined On Twisted N-Enlarged Newton-Hooke Space-Timesfaudzi5505Nessuna valutazione finora
- Bayesian Dynamic Modelling: Bayesian Theory and ApplicationsDocumento27 pagineBayesian Dynamic Modelling: Bayesian Theory and ApplicationsRyan TeehanNessuna valutazione finora
- Feller 1949 - On The Theory of Stochastic Processes, With Par - Ticular Reference To ApplicationsDocumento30 pagineFeller 1949 - On The Theory of Stochastic Processes, With Par - Ticular Reference To ApplicationsGugo ManNessuna valutazione finora
- Mean Reversion Versus Random Walk in Oil and Natural Gas PricesDocumento10 pagineMean Reversion Versus Random Walk in Oil and Natural Gas PricesPedro GerrardNessuna valutazione finora
- 20 Ejs1748Documento47 pagine20 Ejs1748vy tuongNessuna valutazione finora
- Stock Price Jump-Diffusion Process Model Based On Fractional Brownian Motion TheoryDocumento5 pagineStock Price Jump-Diffusion Process Model Based On Fractional Brownian Motion Theorygodwinshi32Nessuna valutazione finora
- Disembodied Technological Change With Several FactorsDocumento8 pagineDisembodied Technological Change With Several FactorsAnonymous sGLwiwMA4Nessuna valutazione finora
- Entropy 20 00613 PDFDocumento18 pagineEntropy 20 00613 PDFVivek AllakaNessuna valutazione finora
- StehlikDocumento4 pagineStehlikanistia hidayatNessuna valutazione finora
- Time Series Analysis Elective-III: Suraj Lamichhane Ast. Professor Department of Civil Engineering Pulchowk CampusDocumento30 pagineTime Series Analysis Elective-III: Suraj Lamichhane Ast. Professor Department of Civil Engineering Pulchowk CampusBijaya PandeyNessuna valutazione finora
- Lecture Notes On Optimization TechniquesDocumento140 pagineLecture Notes On Optimization TechniquesUmer AzharNessuna valutazione finora
- Aumann Type Set-Valued Lebesgue Integral and Representation TheoremDocumento8 pagineAumann Type Set-Valued Lebesgue Integral and Representation TheoremMRNessuna valutazione finora
- Stochastic Processes and Their Applications in Financial PricingDocumento7 pagineStochastic Processes and Their Applications in Financial PricingwandileNessuna valutazione finora
- Optimization and Statistical Methods For High Frequency FinanceDocumento11 pagineOptimization and Statistical Methods For High Frequency FinanceUlises ArayaNessuna valutazione finora
- Chapter 2.2 - Technical Supplement: Liability-Driven InvestingDocumento9 pagineChapter 2.2 - Technical Supplement: Liability-Driven InvestingOliver PinedaNessuna valutazione finora
- Pure Jump Lévy Processes For Asset Price Modelling: Professor of Finance University Paris IX Dauphine and ESSECDocumento25 paginePure Jump Lévy Processes For Asset Price Modelling: Professor of Finance University Paris IX Dauphine and ESSECBob ReeceNessuna valutazione finora
- From Brownianmotionto Operational Risk: Statistical Physics and %nancial MarketsDocumento14 pagineFrom Brownianmotionto Operational Risk: Statistical Physics and %nancial MarketsRaul CalaniNessuna valutazione finora
- Credit Risk Modeling With Affine Processes - Darell DuffieDocumento69 pagineCredit Risk Modeling With Affine Processes - Darell DuffieLast_DonNessuna valutazione finora
- Bridging The Gap - Decoding The Intrinsic Nature of Time in Market DataDocumento15 pagineBridging The Gap - Decoding The Intrinsic Nature of Time in Market DatashayanNessuna valutazione finora
- Pillay 2011Documento7 paginePillay 2011Aditya GuptaNessuna valutazione finora
- Introduction To Hilbert-Huang Transform and Some Recent DevelopmentsDocumento23 pagineIntroduction To Hilbert-Huang Transform and Some Recent DevelopmentsBekraoui KeltoumNessuna valutazione finora
- Exponential Behavior of Neutral Impulsive Stochastic Integro-Differential Equations Driven by Poisson Jumps and Rosenblatt ProcessDocumento21 pagineExponential Behavior of Neutral Impulsive Stochastic Integro-Differential Equations Driven by Poisson Jumps and Rosenblatt Processmoulay kebirNessuna valutazione finora
- Chen and Li - 2009 - A Note On The Principle of Preservation of ProbabiDocumento9 pagineChen and Li - 2009 - A Note On The Principle of Preservation of ProbabiManuel MirandaNessuna valutazione finora
- Hongzhang 2009Documento3 pagineHongzhang 2009Venise003Nessuna valutazione finora
- John D. C. Little: Operations Research, Vol. 9, No. 3. (May - Jun., 1961), Pp. 383-387Documento6 pagineJohn D. C. Little: Operations Research, Vol. 9, No. 3. (May - Jun., 1961), Pp. 383-387Kedar JoshiNessuna valutazione finora
- Probability and Statistics With Reliability, Queuing and Computer Science Applications: Chapter 6 OnDocumento36 pagineProbability and Statistics With Reliability, Queuing and Computer Science Applications: Chapter 6 OnGurjar DevyaniNessuna valutazione finora
- Phillips & Perron - Biometrika - 1988 - Unit Root TestDocumento13 paginePhillips & Perron - Biometrika - 1988 - Unit Root TestLAURA VALENTINA RIQUETH PACHECONessuna valutazione finora
- Chapter11 PDFDocumento29 pagineChapter11 PDFMNessuna valutazione finora
- Electricity Load Demand Forecasting Using Exponential Smoothing MethodsDocumento4 pagineElectricity Load Demand Forecasting Using Exponential Smoothing MethodsFâïsãl ÂfrïãñdïNessuna valutazione finora
- Poisson Processes: Foundation Fortnight, September 2020Documento32 paginePoisson Processes: Foundation Fortnight, September 2020Thalia TitanNessuna valutazione finora
- An Evolutionary Explanation of The Value Premium PuzzleDocumento13 pagineAn Evolutionary Explanation of The Value Premium Puzzle1527351362Nessuna valutazione finora
- For SundayDocumento44 pagineFor SundayRiya SharmaNessuna valutazione finora
- Multiscale Chirplets and Near-Optimal Recovery of ChirpsDocumento41 pagineMultiscale Chirplets and Near-Optimal Recovery of ChirpsEvariste OuattaraNessuna valutazione finora
- FX Talking: Some Stark DivergenceDocumento15 pagineFX Talking: Some Stark DivergencebobmezzNessuna valutazione finora
- Applied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014Documento32 pagineApplied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014bobmezzNessuna valutazione finora
- The Convexity Maven: "Building A Better Volatility Mousetrap"Documento13 pagineThe Convexity Maven: "Building A Better Volatility Mousetrap"bobmezzNessuna valutazione finora
- Towards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010Documento19 pagineTowards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010bobmezzNessuna valutazione finora
- ING Think Rates Spark Shifting GroundsDocumento6 pagineING Think Rates Spark Shifting GroundsbobmezzNessuna valutazione finora
- c1Documento68 paginec1dey_zicoNessuna valutazione finora
- 4703 07 Notes PP NSPPDocumento9 pagine4703 07 Notes PP NSPPМилан МишићNessuna valutazione finora
- A Tutorial On Principal Component AnalysisDocumento12 pagineA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNessuna valutazione finora
- 1 IEOR 4701: Continuous-Time Markov ChainsDocumento22 pagine1 IEOR 4701: Continuous-Time Markov ChainsbobmezzNessuna valutazione finora
- 1 Communication Classes and Irreducibility For Markov ChainsDocumento8 pagine1 Communication Classes and Irreducibility For Markov ChainsbobmezzNessuna valutazione finora
- Relative Value Analysis of SwaptionsDocumento85 pagineRelative Value Analysis of SwaptionsbobmezzNessuna valutazione finora
- Pca Portfolio SelectionDocumento18 paginePca Portfolio Selectionluli_kbreraNessuna valutazione finora
- 1 Discrete-Time Markov ChainsDocumento7 pagine1 Discrete-Time Markov ChainsbobmezzNessuna valutazione finora
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocumento26 pagineTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNessuna valutazione finora
- Statistical Properties of Forward Libor RatesDocumento33 pagineStatistical Properties of Forward Libor RatesbobmezzNessuna valutazione finora
- Measuring Cross Gamma Risk SSRNDocumento16 pagineMeasuring Cross Gamma Risk SSRNbobmezzNessuna valutazione finora
- Derivatives Across Asset ClassesDocumento59 pagineDerivatives Across Asset ClassesbobmezzNessuna valutazione finora
- Market Volatility BulletinDocumento28 pagineMarket Volatility BulletinbobmezzNessuna valutazione finora
- A Tutorial On Principal Component AnalysisDocumento12 pagineA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNessuna valutazione finora
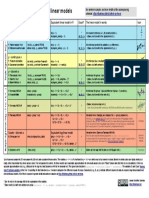
- Common Statistical Tests Are Linear ModelsDocumento1 paginaCommon Statistical Tests Are Linear ModelsbobmezzNessuna valutazione finora
- Siegel ParadoxDocumento4 pagineSiegel ParadoxbobmezzNessuna valutazione finora
- FX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?Documento15 pagineFX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?bobmezzNessuna valutazione finora
- Elices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskDocumento32 pagineElices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskbobmezzNessuna valutazione finora
- Gatheral 1Documento18 pagineGatheral 1Zhenhuan Song100% (1)
- Global Cycle Notes Hope Springs EternalDocumento27 pagineGlobal Cycle Notes Hope Springs EternalbobmezzNessuna valutazione finora
- Global Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmDocumento23 pagineGlobal Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmbobmezzNessuna valutazione finora
- GS Inflation Implementation 10-20Documento20 pagineGS Inflation Implementation 10-20bobmezzNessuna valutazione finora
- Rate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranoDocumento94 pagineRate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranosindhusrivastavaNessuna valutazione finora
- GARCH Models in Python 1Documento31 pagineGARCH Models in Python 1visNessuna valutazione finora
- Berenberg Global ForecastsDocumento15 pagineBerenberg Global ForecastsbobmezzNessuna valutazione finora
- Chapter 11 Risk and Return in Capital MarketsDocumento14 pagineChapter 11 Risk and Return in Capital MarketsshuNessuna valutazione finora
- The Theory of Financial IntermediationDocumento3 pagineThe Theory of Financial IntermediationEdNessuna valutazione finora
- 2017-Herd Behavior in The French Stock MarketDocumento20 pagine2017-Herd Behavior in The French Stock MarketAhmed El-GayarNessuna valutazione finora
- An R Implementation To Financial Risk Measuring Using Value at RiskDocumento48 pagineAn R Implementation To Financial Risk Measuring Using Value at RiskMohamed SabibNessuna valutazione finora
- ACE White Paper 200705Documento70 pagineACE White Paper 200705Bass1237Nessuna valutazione finora
- XMT ScalperDocumento15 pagineXMT ScalperRODRIGO TROCONIS100% (1)
- Adaptive Market Hypothesis Evidence From Indian Bond MarketDocumento14 pagineAdaptive Market Hypothesis Evidence From Indian Bond MarketsaravanakrisNessuna valutazione finora
- Arch Garch AssignmentDocumento5 pagineArch Garch AssignmentSurbhiVijhaniNessuna valutazione finora
- 20 Session Financial Modelling - Rajiv BhutaniDocumento6 pagine20 Session Financial Modelling - Rajiv BhutaniSaksham GoyalNessuna valutazione finora
- Abnormal Audit Fee and Audit QualityDocumento23 pagineAbnormal Audit Fee and Audit QualityYohaNnesDeSetiyanToNessuna valutazione finora
- The Barra Global Equity Model (GEM2) : Research NotesDocumento79 pagineThe Barra Global Equity Model (GEM2) : Research NotesrpriceNessuna valutazione finora
- Modelling Prices of In-Play Football Betting MarketsDocumento24 pagineModelling Prices of In-Play Football Betting MarketsBosttoncicoNessuna valutazione finora
- Implied Vol Surface Parametrization PDFDocumento40 pagineImplied Vol Surface Parametrization PDFsoumensahilNessuna valutazione finora
- Taleb Black SwansDocumento10 pagineTaleb Black SwansRand FitzpatrickNessuna valutazione finora
- Forex VolatilityDocumento25 pagineForex VolatilityNoufal AnsariNessuna valutazione finora
- Running Head: PORTFOLIO ANALYSIS: Woolworths Group LTD Name InstitutionDocumento6 pagineRunning Head: PORTFOLIO ANALYSIS: Woolworths Group LTD Name InstitutionPrinciNessuna valutazione finora
- IIC Paper On Modelling The Intra Day Activity in Stock MarketDocumento32 pagineIIC Paper On Modelling The Intra Day Activity in Stock MarketabhimailsNessuna valutazione finora
- Prashant Shah - SuperTrendDocumento6 paginePrashant Shah - SuperTrendIMaths Powai50% (2)
- New Art March 06Documento16 pagineNew Art March 06api-27370939Nessuna valutazione finora
- Mutual Fund RatiosDocumento9 pagineMutual Fund RatiosAamir Ali ChandioNessuna valutazione finora
- TMPMX 0 ZNsDocumento862 pagineTMPMX 0 ZNsheedi050% (2)
- The Colonel Blotto GameDocumento9 pagineThe Colonel Blotto GameSpencer RascoffNessuna valutazione finora
- Volatility Surface InterpolationDocumento24 pagineVolatility Surface InterpolationMickehugoNessuna valutazione finora
- How To Trade Synthetic Indices: A Guide For BeginnersDocumento25 pagineHow To Trade Synthetic Indices: A Guide For BeginnersHamzah Ahmed100% (8)
- First Hour of Trading - How To Trade Like A Seasoned Pro + Video Tutorial!Documento26 pagineFirst Hour of Trading - How To Trade Like A Seasoned Pro + Video Tutorial!kalpesh katharNessuna valutazione finora
- Investing in VolDocumento16 pagineInvesting in VolcookeNessuna valutazione finora
- 60-The Volatility (Regime) Switch IndicatorDocumento4 pagine60-The Volatility (Regime) Switch IndicatorBenjaminRavaruNessuna valutazione finora
- 8 In-Depth Quantitative Analysis QuestionsDocumento2 pagine8 In-Depth Quantitative Analysis QuestionsDeepak AhujaNessuna valutazione finora
- 52127-Capital Iq Quant Research Introducing Our Equity Risk Models - July 2010 PDFDocumento21 pagine52127-Capital Iq Quant Research Introducing Our Equity Risk Models - July 2010 PDFMark O'LearyNessuna valutazione finora
- Heston Model: Sankarshan Basu Professor of Finance Indian Institute of Management BangaloreDocumento3 pagineHeston Model: Sankarshan Basu Professor of Finance Indian Institute of Management Bangaloremiku hrshNessuna valutazione finora
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsDa EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsValutazione: 4.5 su 5 stelle4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeDa EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeValutazione: 4 su 5 stelle4/5 (2)
- Calculus Workbook For Dummies with Online PracticeDa EverandCalculus Workbook For Dummies with Online PracticeValutazione: 3.5 su 5 stelle3.5/5 (8)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingDa EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingValutazione: 4.5 su 5 stelle4.5/5 (21)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Da EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Valutazione: 5 su 5 stelle5/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormDa EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormValutazione: 5 su 5 stelle5/5 (5)
- Who Tells the Truth?: Collection of Logical Puzzles to Make You ThinkDa EverandWho Tells the Truth?: Collection of Logical Puzzles to Make You ThinkValutazione: 5 su 5 stelle5/5 (1)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Da EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Nessuna valutazione finora
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsDa EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsValutazione: 3.5 su 5 stelle3.5/5 (9)
- Assessment Prep for Common Core Mathematics, Grade 6Da EverandAssessment Prep for Common Core Mathematics, Grade 6Valutazione: 5 su 5 stelle5/5 (1)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldDa EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldValutazione: 3 su 5 stelle3/5 (79)