Potrebbero piacerti anche
- Projections L1Documento61 pagineProjections L1subhasree.ghosh.cse21Nessuna valutazione finora
- CG - Unit - V 2020Documento26 pagineCG - Unit - V 2020Arun ArunNessuna valutazione finora
- ProjectionDocumento22 pagineProjectionjimgunterNessuna valutazione finora
- LECTURE 11,12 Camera Models: CSE 320 Graphics ProgrammingDocumento71 pagineLECTURE 11,12 Camera Models: CSE 320 Graphics ProgrammingIsaac Joel RajNessuna valutazione finora
- Projections LectureDocumento28 pagineProjections LectureShubham MauryaNessuna valutazione finora
- Viewing JPDocumento44 pagineViewing JPkaneeshaNessuna valutazione finora
- Projection - Parallel and PerspectiveDocumento26 pagineProjection - Parallel and PerspectiveGauravJainNessuna valutazione finora
- 4 Projections First Angle Third AngleDocumento29 pagine4 Projections First Angle Third AngleGanta NaveenNessuna valutazione finora
- 1 IntroductionDocumento58 pagine1 Introductionmmeharbe23Nessuna valutazione finora
- Lec 3 TOP2Documento32 pagineLec 3 TOP2Mohammad BilalNessuna valutazione finora
- Canonical View Volume Orthographic Projection Perspective Projection Shirley Chapter 7Documento30 pagineCanonical View Volume Orthographic Projection Perspective Projection Shirley Chapter 7SHYRA APRIL JOY DELA CRUZNessuna valutazione finora
- Projection-Computer GraphicsDocumento60 pagineProjection-Computer GraphicsGopal SharmaNessuna valutazione finora
- Chapter 14 - Axonometric ProjectionDocumento38 pagineChapter 14 - Axonometric ProjectionPurece EugenNessuna valutazione finora
- Indian Institute of Technology BhubaneswarDocumento34 pagineIndian Institute of Technology BhubaneswarAmizhdhan Senthil VelanNessuna valutazione finora
- Projections: Sanu Philip No:47Documento21 pagineProjections: Sanu Philip No:47tusgNessuna valutazione finora
- 3D Viewing & Clipping: Angel Chapter 5Documento20 pagine3D Viewing & Clipping: Angel Chapter 5Aijaz SaudagarNessuna valutazione finora
- Projection types and viewsDocumento4 pagineProjection types and viewsOscarArteagaNessuna valutazione finora
- IIT Roorkee Engineering Drawing Class OverviewDocumento58 pagineIIT Roorkee Engineering Drawing Class OverviewKenneth LoboNessuna valutazione finora
- 3D Viewing and Visible Surface Detection: Module - 4Documento50 pagine3D Viewing and Visible Surface Detection: Module - 4Shain SethiNessuna valutazione finora
- UIE Academic Unit-1: Bachelor of Engineering (CSE, CSE-IBM, IT) Engineering Graphics Using CAD MEP-117Documento19 pagineUIE Academic Unit-1: Bachelor of Engineering (CSE, CSE-IBM, IT) Engineering Graphics Using CAD MEP-117Mukul RathoreNessuna valutazione finora
- UIE Academic Unit-1: Bachelor of Engineering (CSE, CSE-IBM, IT) Engineering Graphics Using CAD MEP-117Documento19 pagineUIE Academic Unit-1: Bachelor of Engineering (CSE, CSE-IBM, IT) Engineering Graphics Using CAD MEP-117Mukul RathoreNessuna valutazione finora
- 3D Viewing Explained: Projections, Transformations & MoreDocumento47 pagine3D Viewing Explained: Projections, Transformations & MoreWafa ElgalhoudNessuna valutazione finora
- Angel Chapter 5 ProjectionsDocumento9 pagineAngel Chapter 5 ProjectionsstrrrweNessuna valutazione finora
- Lec-8 - 3D DisplayDocumento26 pagineLec-8 - 3D Displaybijoystudent481Nessuna valutazione finora
- Projection of PointsDocumento20 pagineProjection of PointsAman kumarNessuna valutazione finora
- How to draw orthographic and isometric viewsDocumento27 pagineHow to draw orthographic and isometric viewsM. Sharjeel FarzadNessuna valutazione finora
- Academic Unit-1: Bachelor of Engineering (CSE, IT, CSE-IBM)Documento18 pagineAcademic Unit-1: Bachelor of Engineering (CSE, IT, CSE-IBM)PARAS MEHTANessuna valutazione finora
- ProjectionDocumento39 pagineProjectionNew TempNessuna valutazione finora
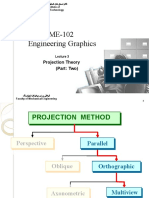
- Engineering Graphics: Projection Theory (Part: Two)Documento32 pagineEngineering Graphics: Projection Theory (Part: Two)Afaq AhmedNessuna valutazione finora
- 29. Transformations1Documento8 pagine29. Transformations1MURALEE A/L VEERAMALAI MoeNessuna valutazione finora
- 4b Auxiliary-PlanesDocumento14 pagine4b Auxiliary-PlanesKenneth LoboNessuna valutazione finora
- Following Topics Will Be Covered in Solid Geometry: Concept of Auxiliary PlanesDocumento15 pagineFollowing Topics Will Be Covered in Solid Geometry: Concept of Auxiliary Planeskamal sharmaNessuna valutazione finora
- Projection of PointsDocumento21 pagineProjection of PointsArya GuptaNessuna valutazione finora
- Chapter 05 Pictorial SketchingDocumento35 pagineChapter 05 Pictorial Sketchinganon_970904412Nessuna valutazione finora
- Chapter 05 Pictorial SketchingDocumento36 pagineChapter 05 Pictorial SketchingMilkiNessuna valutazione finora
- 3 D TransformationDocumento53 pagine3 D TransformationshubhangiNessuna valutazione finora
- 4 Slides 9ppDocumento5 pagine4 Slides 9ppBonie LabadanNessuna valutazione finora
- 01 1投影的基本知识.enDocumento34 pagine01 1投影的基本知识.enLorelleNessuna valutazione finora
- Viewing in 3D Common Coordinate Systems: Specifying The Viewing CoordinatesDocumento10 pagineViewing in 3D Common Coordinate Systems: Specifying The Viewing CoordinatesveerendraNessuna valutazione finora
- Important Facts on Projection TypesDocumento11 pagineImportant Facts on Projection TypesWAJID AJMALNessuna valutazione finora
- Engneering DrawingDocumento201 pagineEngneering DrawingJaipreet NagpalNessuna valutazione finora
- Orthographic ProjectionDocumento46 pagineOrthographic ProjectionamrutnerlikarNessuna valutazione finora
- Engineering Drawing VisualizationDocumento61 pagineEngineering Drawing VisualizationAliaa Ahmed ShemariNessuna valutazione finora
- Phy 214 - Optics and Acoustics: Jumarie E. Coreses, Rche, RCHT MST - ChemistryDocumento60 paginePhy 214 - Optics and Acoustics: Jumarie E. Coreses, Rche, RCHT MST - ChemistryjumarieNessuna valutazione finora
- Module V-ppt_2Documento58 pagineModule V-ppt_2Rajeswari RNessuna valutazione finora
- 3d To 2d ProjectionDocumento20 pagine3d To 2d ProjectionDeepa S100% (1)
- CH4 - Pictorial DrawingDocumento36 pagineCH4 - Pictorial DrawingSolooloo Kebede NemomsaNessuna valutazione finora
- Chapter 05 Pictorial SketchingDocumento36 pagineChapter 05 Pictorial SketchingMuhammad RashidNessuna valutazione finora
- Transformations: Types of Projections in 2D and 3D ViewsDocumento48 pagineTransformations: Types of Projections in 2D and 3D ViewsIdontknow IdontknowNessuna valutazione finora
- Lecture 1 ME104Documento59 pagineLecture 1 ME104Abdulrahman MohammedNessuna valutazione finora
- CG 5Documento1 paginaCG 5Abhishek DangolNessuna valutazione finora
- ProjectionsDocumento28 pagineProjectionssumayya shaikNessuna valutazione finora
- Arts and Graphics 3Documento21 pagineArts and Graphics 3ymukhtar897Nessuna valutazione finora
- 1. PointsDocumento14 pagine1. Pointsmanu.v2412Nessuna valutazione finora
- DD2423 Image Analysis and Computer Vision FundamentalsDocumento45 pagineDD2423 Image Analysis and Computer Vision FundamentalsTrọng QuảngNessuna valutazione finora
- Projections Theory: Types and Applications in 3D ModelingDocumento59 pagineProjections Theory: Types and Applications in 3D ModelingPrashant ChaudhryNessuna valutazione finora
- 3D Graphics and ProjectionsDocumento24 pagine3D Graphics and ProjectionsJohnNessuna valutazione finora
- 03 MFCCDocumento50 pagine03 MFCCaaridrakaNessuna valutazione finora
- MNC PlacementsDocumento1 paginaMNC PlacementsYtyt GffgNessuna valutazione finora
- C Lecture NotesDocumento188 pagineC Lecture Notessurendraaalla0% (1)
- C Lecture NotesDocumento188 pagineC Lecture Notessurendraaalla0% (1)
- C Lecture NotesDocumento188 pagineC Lecture Notessurendraaalla0% (1)
- Book 1Documento18 pagineBook 1Ytyt GffgNessuna valutazione finora
- Ham Hai Rahi Pyaar KeDocumento2 pagineHam Hai Rahi Pyaar KeYtyt GffgNessuna valutazione finora
- SongsDocumento1 paginaSongsYtyt GffgNessuna valutazione finora
- EDUC 5240 - Creating Positive Classroom EnvironmentsDocumento5 pagineEDUC 5240 - Creating Positive Classroom EnvironmentsMay Phyo ThuNessuna valutazione finora
- ABAP Program Types and System FieldsDocumento9 pagineABAP Program Types and System FieldsJo MallickNessuna valutazione finora
- ISO 9001 internal audit criteria and examples guideDocumento22 pagineISO 9001 internal audit criteria and examples guideMukesh Yadav100% (2)
- BiblicalDocumento413 pagineBiblicalMichael DiazNessuna valutazione finora
- B767 WikipediaDocumento18 pagineB767 WikipediaxXxJaspiexXx100% (1)
- Financial Management-Capital BudgetingDocumento39 pagineFinancial Management-Capital BudgetingParamjit Sharma100% (53)
- Euro Tuner 1 2008 PDFDocumento2 pagineEuro Tuner 1 2008 PDFDarwinNessuna valutazione finora
- Trends, Networks, and Critical Thinking in The 21st CenturyDocumento22 pagineTrends, Networks, and Critical Thinking in The 21st CenturyGabrelle Ogayon100% (1)
- APEC ArchitectDocumento6 pagineAPEC Architectsarah joy CastromayorNessuna valutazione finora
- Chippernac: Vacuum Snout Attachment (Part Number 1901113)Documento2 pagineChippernac: Vacuum Snout Attachment (Part Number 1901113)GeorgeNessuna valutazione finora
- AIRs LM Business-Finance Q1 Module-5Documento25 pagineAIRs LM Business-Finance Q1 Module-5Oliver N AnchetaNessuna valutazione finora
- Keppel's lease rights and option to purchase land upheldDocumento6 pagineKeppel's lease rights and option to purchase land upheldkdcandariNessuna valutazione finora
- APFC Accountancy Basic Study Material For APFCEPFO ExamDocumento3 pagineAPFC Accountancy Basic Study Material For APFCEPFO ExamIliasNessuna valutazione finora
- Q3 Week 7 Day 2Documento23 pagineQ3 Week 7 Day 2Ran MarNessuna valutazione finora
- Chapter 6 Sequence PakistanDocumento16 pagineChapter 6 Sequence PakistanAsif Ullah0% (1)
- RTS PMR Question Bank Chapter 2 2008Documento7 pagineRTS PMR Question Bank Chapter 2 2008iwan93Nessuna valutazione finora
- Destiny by T.D. JakesDocumento17 pagineDestiny by T.D. JakesHBG Nashville89% (9)
- 04 - JTC Template On Project ProposalDocumento10 pagine04 - JTC Template On Project Proposalbakelm alqamisNessuna valutazione finora
- History of Early ChristianityDocumento40 pagineHistory of Early ChristianityjeszoneNessuna valutazione finora
- Reaction PaperDocumento1 paginaReaction Papermarvin125Nessuna valutazione finora
- Guest Speaker SpeechDocumento12 pagineGuest Speaker SpeechNorhana Manas83% (82)
- KINGS OF TURKS - TURKISH ROYALTY Descent-LinesDocumento8 pagineKINGS OF TURKS - TURKISH ROYALTY Descent-Linesaykutovski100% (1)
- Rebekah Hoeger ResumeDocumento1 paginaRebekah Hoeger ResumerebekahhoegerNessuna valutazione finora
- Death and DickinsonDocumento12 pagineDeath and DickinsonHarshita Sohal100% (1)
- JKFBDDocumento2 pagineJKFBDGustinarsari Dewi WNessuna valutazione finora
- Deforestation Contributes To Global Warming: Bruno GERVETDocumento11 pagineDeforestation Contributes To Global Warming: Bruno GERVETMajid JatoiNessuna valutazione finora
- Legal Aspect of Business Course Outline (2017)Documento6 pagineLegal Aspect of Business Course Outline (2017)Sulekha BhattacherjeeNessuna valutazione finora
- Revision and Second Term TestDocumento15 pagineRevision and Second Term TestThu HươngNessuna valutazione finora
- Yoga Practice Guide: DR - Abhishek VermaDocumento26 pagineYoga Practice Guide: DR - Abhishek VermaAmarendra Kumar SharmaNessuna valutazione finora
- Meesho FDocumento75 pagineMeesho FAyan khanNessuna valutazione finora