Potrebbero piacerti anche
- Control SystemsDocumento14 pagineControl SystemshenryNessuna valutazione finora
- Control Design Principles - 040421Documento10 pagineControl Design Principles - 040421tanjung tanriNessuna valutazione finora
- Lecture 9 - Modeling, Simulation, and Systems EngineeringDocumento40 pagineLecture 9 - Modeling, Simulation, and Systems EngineeringmorolosusNessuna valutazione finora
- Block Diagram of Control System: R e N y UDocumento20 pagineBlock Diagram of Control System: R e N y Uমেশকাতুল ইসলাম100% (1)
- Marlin Ch09Documento35 pagineMarlin Ch09Eduardo SaenzNessuna valutazione finora
- Chapter#1 - Control SystemsDocumento24 pagineChapter#1 - Control SystemsMohammad BilalNessuna valutazione finora
- Introduction to Adaptive Control TechniquesDocumento45 pagineIntroduction to Adaptive Control TechniquesTariq KhanNessuna valutazione finora
- Mechatronics DC Motor - Tachometer Closed-Loop Speed Control SystemDocumento29 pagineMechatronics DC Motor - Tachometer Closed-Loop Speed Control SystemskheoNessuna valutazione finora
- Computer ClockDocumento13 pagineComputer ClockGlan DevadhasNessuna valutazione finora
- DC Motor Case Study PDFDocumento29 pagineDC Motor Case Study PDFliling100% (1)
- Lesson 1: Introduction To Control Systems TechnologyDocumento28 pagineLesson 1: Introduction To Control Systems TechnologyJiss Mohan KNessuna valutazione finora
- Will 10 Anytime: Day The 12Documento38 pagineWill 10 Anytime: Day The 12BrunoLopesNessuna valutazione finora
- Automation and Control Engineering (R17A0327) : 4 Year B. Tech I-Sem, Mechanical EngineeringDocumento20 pagineAutomation and Control Engineering (R17A0327) : 4 Year B. Tech I-Sem, Mechanical EngineeringJEYAVEL PALANISAMYNessuna valutazione finora
- Chapter 1-Control-System-1Documento70 pagineChapter 1-Control-System-1Abo Shaker HaboudalNessuna valutazione finora
- DCsummary 1Documento5 pagineDCsummary 1khin muyar ayeNessuna valutazione finora
- Transfer FunctionDocumento62 pagineTransfer FunctionTam PhamNessuna valutazione finora
- Lecture-6 - Control Stratefgies-Steps in Design of Control SystemDocumento24 pagineLecture-6 - Control Stratefgies-Steps in Design of Control SystemKshitij SoniNessuna valutazione finora
- CST 04Documento95 pagineCST 04Sourav ChoubeyNessuna valutazione finora
- PID auto-tuners for optimized controlDocumento2 paginePID auto-tuners for optimized controlAnonymous by1DIx6lhNessuna valutazione finora
- 5 Process Control Dec 8Documento61 pagine5 Process Control Dec 8heroNessuna valutazione finora
- Lec1 PLCDocumento11 pagineLec1 PLCMohammed EhabNessuna valutazione finora
- Model Predictive ControlDocumento49 pagineModel Predictive ControlMaximo Plata LeyNessuna valutazione finora
- Ball Mill Control (Compatibility Mode)Documento31 pagineBall Mill Control (Compatibility Mode)Nael100% (1)
- INDUSTRIAL AUTOMATION - Controller TuningDocumento7 pagineINDUSTRIAL AUTOMATION - Controller TuningPatil Amol PandurangNessuna valutazione finora
- Week14pidmay242016pe3032 160530081519Documento57 pagineWeek14pidmay242016pe3032 160530081519AztvNessuna valutazione finora
- NSET-07: Adaptive Control Systems ATDocumento15 pagineNSET-07: Adaptive Control Systems ATapi-19799369Nessuna valutazione finora
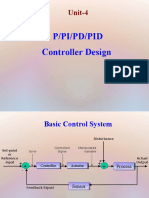
- P/Pi/Pd/Pid Controller Design: Unit-4Documento39 pagineP/Pi/Pd/Pid Controller Design: Unit-4harish9Nessuna valutazione finora
- Pie Control TutorialDocumento15 paginePie Control Tutorialdr.rnsraoNessuna valutazione finora
- ControllersDocumento10 pagineControllersShreyaskar SinghNessuna valutazione finora
- Lecture-5 - Classification of Process Variables - Control StrategiesDocumento18 pagineLecture-5 - Classification of Process Variables - Control StrategiesKshitij SoniNessuna valutazione finora
- Modelling and Process Dynamics:: Profesora: Silvia Ochoa Cáceres Universidad de Antioquia 01-2021Documento31 pagineModelling and Process Dynamics:: Profesora: Silvia Ochoa Cáceres Universidad de Antioquia 01-2021Joha BetancurNessuna valutazione finora
- EE3041 Control System Design: Principles of Feedback ControlDocumento5 pagineEE3041 Control System Design: Principles of Feedback ControlBharath PulavarthiNessuna valutazione finora
- ME451 L0 IntroductionDocumento239 pagineME451 L0 IntroductiontimketaNessuna valutazione finora
- ControlDocumento54 pagineControlaread moelNessuna valutazione finora
- 01 Industrial Automation ControllersDocumento29 pagine01 Industrial Automation ControllersNirjhar BhatnaagarNessuna valutazione finora
- 1.intro - Modelamiento y DinámicaDocumento32 pagine1.intro - Modelamiento y DinámicaDaniel GarcíaNessuna valutazione finora
- AnswersDocumento5 pagineAnswersShaik RoshanNessuna valutazione finora
- Hardware in The Loop For Electronic Throttle System Identification and ControlDocumento21 pagineHardware in The Loop For Electronic Throttle System Identification and ControldardoNessuna valutazione finora
- UntitledDocumento4 pagineUntitledProxy EmailNessuna valutazione finora
- Optimal Robust PID Control Using Taguchi MethodDocumento6 pagineOptimal Robust PID Control Using Taguchi MethodIsra Lemus SanchezNessuna valutazione finora
- Dynamic Modelling for Process ControlDocumento71 pagineDynamic Modelling for Process ControlpierrefreNessuna valutazione finora
- CLL261 Lec4Documento8 pagineCLL261 Lec4Gautam AhujaNessuna valutazione finora
- Tuning Workshop PID Controllers: Shell Global SolutionsDocumento33 pagineTuning Workshop PID Controllers: Shell Global SolutionsSunil SinghNessuna valutazione finora
- Robust Adaptive Control: The Search For The Holy GrailDocumento45 pagineRobust Adaptive Control: The Search For The Holy GrailGilmar LeiteNessuna valutazione finora
- First Page PDFDocumento1 paginaFirst Page PDFAli ErNessuna valutazione finora
- Unit 3a Industrial Control SystemsDocumento25 pagineUnit 3a Industrial Control SystemsT. Rajpradeesh MECH-LECTNessuna valutazione finora
- ME451: Control Systems: Dr. Jongeun Choi Department of Mechanical Engineering Michigan State UniversityDocumento18 pagineME451: Control Systems: Dr. Jongeun Choi Department of Mechanical Engineering Michigan State UniversityVu NghiaNessuna valutazione finora
- Lecture 8 Robot Control StudentDocumento52 pagineLecture 8 Robot Control StudentMustafa BüyükNessuna valutazione finora
- Process Instrumentation and Control SystemDocumento78 pagineProcess Instrumentation and Control SystemMorgen Mukamwi100% (1)
- MRAC vs STR ComparisonDocumento1 paginaMRAC vs STR Comparisonshadan alamNessuna valutazione finora
- Assignment (1) Robust and Aduptive Cantrol Difference Between MRAC and STRDocumento1 paginaAssignment (1) Robust and Aduptive Cantrol Difference Between MRAC and STRshadan alamNessuna valutazione finora
- 2 ProvableCloudControlsDocumento29 pagine2 ProvableCloudControlsChristopheNessuna valutazione finora
- Controllers and Thier Tuningclo2Documento31 pagineControllers and Thier Tuningclo2AreeshaNessuna valutazione finora
- Control Systems: - 1 - Class Code: ME-2011A - Engr:M Irfan KhanDocumento33 pagineControl Systems: - 1 - Class Code: ME-2011A - Engr:M Irfan KhanZia AtiqNessuna valutazione finora
- 5 Process ControlDocumento79 pagine5 Process ControlGurunath EpiliNessuna valutazione finora
- Automatic Control System and Control LoopsDocumento60 pagineAutomatic Control System and Control Loopsmoovendan pNessuna valutazione finora
- 03a. Industrial Control SystemsDocumento25 pagine03a. Industrial Control Systemsnaveedzia01Nessuna valutazione finora
- 05 Introduction PID Controller DesignDocumento22 pagine05 Introduction PID Controller DesignAhtisham195Nessuna valutazione finora
- Techniques for Adaptive ControlDa EverandTechniques for Adaptive ControlVance VanDorenNessuna valutazione finora
- Formal Verification of Control System SoftwareDa EverandFormal Verification of Control System SoftwareNessuna valutazione finora
- Bt134-600e, 127 Bt134-600e, 127Documento15 pagineBt134-600e, 127 Bt134-600e, 127Samuel BrandNessuna valutazione finora
- DCCDDocumento7 pagineDCCDjhonNessuna valutazione finora
- Eksin FuzzyPID OverviewDocumento9 pagineEksin FuzzyPID OverviewSamuel BrandNessuna valutazione finora
- FCbookDocumento8 pagineFCbookSamuel BrandNessuna valutazione finora
- Time Response of Discrete Time SystemsDocumento7 pagineTime Response of Discrete Time SystemsSreerag Kunnathu SugathanNessuna valutazione finora
- Closed-Loop Identification Issues in The Process IndustryDocumento211 pagineClosed-Loop Identification Issues in The Process IndustrySamuel BrandNessuna valutazione finora
- Module 5: Design of Sampled Data Control Systems: Lecture Note 7Documento7 pagineModule 5: Design of Sampled Data Control Systems: Lecture Note 7jhonNessuna valutazione finora
- The PID Control Algorithm How It Works, How To Tune It, and How To Use It. 2nd EdDocumento68 pagineThe PID Control Algorithm How It Works, How To Tune It, and How To Use It. 2nd EdmiroperNessuna valutazione finora
- A Design and Simulation of Fuzzy PID Controller FoDocumento8 pagineA Design and Simulation of Fuzzy PID Controller FoSamuel BrandNessuna valutazione finora
- The PID Control Algorithm How It Works, How To Tune It, and How To Use It. 2nd EdDocumento68 pagineThe PID Control Algorithm How It Works, How To Tune It, and How To Use It. 2nd EdmiroperNessuna valutazione finora
- Engineering Village Abstract 2-14-2018 20384498Documento1 paginaEngineering Village Abstract 2-14-2018 20384498Samuel BrandNessuna valutazione finora
- IJNES Issue3 28 32 673361630Documento6 pagineIJNES Issue3 28 32 673361630Samuel BrandNessuna valutazione finora
- F 21838938 D 87Documento6 pagineF 21838938 D 87Samuel BrandNessuna valutazione finora
- Neural Networks: MATLABDocumento91 pagineNeural Networks: MATLABlaerciomosNessuna valutazione finora
- Predictive ControlDocumento4 paginePredictive ControlSamuel BrandNessuna valutazione finora
- Deep-Drone-Object 2Documento8 pagineDeep-Drone-Object 2Samuel BrandNessuna valutazione finora
- 5 DIRAC SlidesDocumento19 pagine5 DIRAC SlidesSamuel BrandNessuna valutazione finora
- 03 Correcao Exercicios FixacaoDocumento3 pagine03 Correcao Exercicios FixacaoRodrigoNessuna valutazione finora
- Multi-Band Booster With HRLB - In-Band Routed DCN Solution GuideDocumento26 pagineMulti-Band Booster With HRLB - In-Band Routed DCN Solution GuideAchintha AluthmanageNessuna valutazione finora
- Central Angles and Inscribed Angles GuideDocumento22 pagineCentral Angles and Inscribed Angles GuideEric de Guzman100% (1)
- TCP Operational Overview and The TCP Finite State Machine (FSM)Documento4 pagineTCP Operational Overview and The TCP Finite State Machine (FSM)Mayank JaitlyNessuna valutazione finora
- Medical Oxygen Cylinder Filling System User ManualDocumento57 pagineMedical Oxygen Cylinder Filling System User ManualAldo Tolaba QuirogaNessuna valutazione finora
- Presentation - Ftserver Gen 10 Slide LibraryDocumento25 paginePresentation - Ftserver Gen 10 Slide LibraryJose AndresNessuna valutazione finora
- AdvancesDocumento328 pagineAdvanceshanumsj123Nessuna valutazione finora
- TP 03: Technique D'optimisation PSODocumento3 pagineTP 03: Technique D'optimisation PSOCEM Yelle N centreNessuna valutazione finora
- Cost Estimation TechniquesDocumento41 pagineCost Estimation TechniquessubashNessuna valutazione finora
- Computational Intelligence in Communications and Business AnalyticsDocumento369 pagineComputational Intelligence in Communications and Business AnalyticsSourasish NathNessuna valutazione finora
- Oracle Coherence Admin GuideDocumento156 pagineOracle Coherence Admin Guidegisharoy100% (1)
- Wound ScaleDocumento4 pagineWound ScaleHumam SyriaNessuna valutazione finora
- Powered Acoustimass - 30 Speaker System AM-30P: Service ManualDocumento48 paginePowered Acoustimass - 30 Speaker System AM-30P: Service ManualHama Aiea100% (1)
- Composition, Thermal and Rheological Behaviour of Selected Greek HoneysDocumento13 pagineComposition, Thermal and Rheological Behaviour of Selected Greek HoneyssyazaqilahNessuna valutazione finora
- Maintenance Recommendations: Operation and Maintenance ManualDocumento10 pagineMaintenance Recommendations: Operation and Maintenance ManualAmy Nur SNessuna valutazione finora
- Lecture 01Documento18 pagineLecture 01priyasonu049Nessuna valutazione finora
- Welcome: Bahasa Inggris Teknik I Ahmad Nusi, S. PD., M. PDDocumento11 pagineWelcome: Bahasa Inggris Teknik I Ahmad Nusi, S. PD., M. PDAsril SalongNessuna valutazione finora
- Toraiz SP-16Documento89 pagineToraiz SP-16ScappinNessuna valutazione finora
- Design of Rigid Pavement CC Road With M30Documento2 pagineDesign of Rigid Pavement CC Road With M30Yedla Neelakanteshwar100% (3)
- 478 - Phs 242 NotesDocumento61 pagine478 - Phs 242 NotesSovan ChakrabortyNessuna valutazione finora
- DMF360 Tandem Lift With ForkliftDocumento4 pagineDMF360 Tandem Lift With Forkliftreda mesbahNessuna valutazione finora
- 1900.65A Monitor DatasheetDocumento26 pagine1900.65A Monitor DatasheetAncuța DanielNessuna valutazione finora
- Chapter 6 Basic Heat TransferDocumento7 pagineChapter 6 Basic Heat TransferGabo MarquezNessuna valutazione finora
- Matrix Structural Analysis of BeamsDocumento28 pagineMatrix Structural Analysis of BeamsKristine May Maturan0% (1)
- DL-H61M-VG4: Motherboard User ManualDocumento52 pagineDL-H61M-VG4: Motherboard User ManualSutripti Bardhan100% (1)
- Refinery TankagesDocumento4 pagineRefinery Tankagesmayuresh1101100% (1)
- Energy Criteria in GRIHA PDFDocumento71 pagineEnergy Criteria in GRIHA PDFAnisha Prakash100% (1)
- Dimensional Analysis AND Similarity: Chapter-5. (Frank White)Documento46 pagineDimensional Analysis AND Similarity: Chapter-5. (Frank White)ShujaAmjadNessuna valutazione finora
- DebugDocumento14 pagineDebugMigui94Nessuna valutazione finora
- Trenes de Engranajes - PresentaciónDocumento17 pagineTrenes de Engranajes - PresentaciónPedro Jorge De los SantosNessuna valutazione finora