Potrebbero piacerti anche
- 19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraDocumento49 pagine19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraTizon Star100% (1)
- 3 Trajectory Planning 2021Documento34 pagine3 Trajectory Planning 2021RhusharvinNessuna valutazione finora
- Trajectory Generation for ManipulatorsDocumento39 pagineTrajectory Generation for ManipulatorsHo Lam HeungNessuna valutazione finora
- CH 5Documento26 pagineCH 5kaviyeluNessuna valutazione finora
- Robotics Trajectory PlanningDocumento52 pagineRobotics Trajectory PlanningFinto RaphelNessuna valutazione finora
- Unit 5Documento16 pagineUnit 5kssrao13Nessuna valutazione finora
- Robot Technology: Ch.7 Trajectory Planning of RobotsDocumento53 pagineRobot Technology: Ch.7 Trajectory Planning of RobotsmubarakNessuna valutazione finora
- CH 4Documento17 pagineCH 4ArganoNessuna valutazione finora
- Path Following Mobile Robot in The Presence of Velocity ConstraintsDocumento12 paginePath Following Mobile Robot in The Presence of Velocity ConstraintsmonikNessuna valutazione finora
- Arm Owi 535Documento8 pagineArm Owi 535Felipe Apaza100% (1)
- ROBOT TRAJECTORY PLANNINGDocumento60 pagineROBOT TRAJECTORY PLANNINGRagava TalluriNessuna valutazione finora
- Assignment 7Documento2 pagineAssignment 7mohamed haniNessuna valutazione finora
- 08 Robotics F16MTE Path and Trajectory PlanningDocumento21 pagine08 Robotics F16MTE Path and Trajectory PlanningasadNessuna valutazione finora
- Dec 2011 MidtermDocumento6 pagineDec 2011 MidtermChachi CNessuna valutazione finora
- L9 Trajectory Planning 1 V1Documento15 pagineL9 Trajectory Planning 1 V1shaheerdurraniNessuna valutazione finora
- Differential Drive KinematicsDocumento10 pagineDifferential Drive Kinematicsnesquik_snackNessuna valutazione finora
- Path Planning & Trajectory Generation: Berke GürDocumento43 paginePath Planning & Trajectory Generation: Berke GürOmar Seraj Ed-DeenNessuna valutazione finora
- Lecture02 P1Documento29 pagineLecture02 P1thanhgold1105Nessuna valutazione finora
- Course: KEE 2423 Signal & Circuit Theory Tutorial 3: Chapter 3: The Laplace Transform MethodDocumento3 pagineCourse: KEE 2423 Signal & Circuit Theory Tutorial 3: Chapter 3: The Laplace Transform MethodNur IzazayaNessuna valutazione finora
- Robotics Take Home Exam DetailsDocumento9 pagineRobotics Take Home Exam DetailsJamesNessuna valutazione finora
- Robotic Systems - Trajectory Planning: Paolo Di LilloDocumento26 pagineRobotic Systems - Trajectory Planning: Paolo Di LilloEbaneo VkNessuna valutazione finora
- Differential drive mobile robot odometryDocumento9 pagineDifferential drive mobile robot odometryAmit ChavanNessuna valutazione finora
- Position: + 3.00, Where X Is in Meters and T Is in Seconds. DetermineDocumento5 paginePosition: + 3.00, Where X Is in Meters and T Is in Seconds. Determineanggian anggraeniNessuna valutazione finora
- PHYS 101 - General Physics I Midterm Exam 1: Duration: 120 Minutes Saturday, 11 March 2017, 14:00Documento4 paginePHYS 101 - General Physics I Midterm Exam 1: Duration: 120 Minutes Saturday, 11 March 2017, 14:00Mohammed AL-sharafiNessuna valutazione finora
- Identification of Crack Location in A Rotor-Bearing System Using Wavelet TransformsDocumento7 pagineIdentification of Crack Location in A Rotor-Bearing System Using Wavelet TransformsJoel Morales PerezNessuna valutazione finora
- Final Exam-14122020Documento2 pagineFinal Exam-14122020KRISHNA KOTI SAI PottupalliNessuna valutazione finora
- Class Notes, Trajectory Planning, COMS4733: 1 TrajectoriesDocumento9 pagineClass Notes, Trajectory Planning, COMS4733: 1 TrajectoriesVashish RamrechaNessuna valutazione finora
- Generate Stepper Motor Linear Speed Profile in Real TimeDocumento14 pagineGenerate Stepper Motor Linear Speed Profile in Real TimeClaudio PinheiroNessuna valutazione finora
- Fundamentals of Physics SoloutionDocumento9 pagineFundamentals of Physics Soloution8310032914Nessuna valutazione finora
- 5.movement Optimization of Robotic Arms For EnergyDocumento4 pagine5.movement Optimization of Robotic Arms For Energyrajmeet singhNessuna valutazione finora
- Engineering lab report covers magnetic field of coilsDocumento9 pagineEngineering lab report covers magnetic field of coilsBabong KobNessuna valutazione finora
- Chapter 2 AssignmentDocumento17 pagineChapter 2 Assignmentramel sigueNessuna valutazione finora
- Tracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorDocumento7 pagineTracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorViet Nguyen TrungNessuna valutazione finora
- Brief Paper Output Feedback Controller Design of A Unicycle-Type Mobile Robot With Delayed MeasurementsDocumento8 pagineBrief Paper Output Feedback Controller Design of A Unicycle-Type Mobile Robot With Delayed MeasurementsZeeshan ShamsiNessuna valutazione finora
- Modeling of A Three Wheeled Omnidirectional Robot Including Friction ModelsDocumento6 pagineModeling of A Three Wheeled Omnidirectional Robot Including Friction ModelsAli EbNessuna valutazione finora
- Curvilinear MotionDocumento22 pagineCurvilinear MotionRjay FloresNessuna valutazione finora
- 8-QUINTIC and LFSB Trajectory planning-20-Sep-2018Reference Material I - Quintic Polynomial TrajectoryDocumento20 pagine8-QUINTIC and LFSB Trajectory planning-20-Sep-2018Reference Material I - Quintic Polynomial TrajectoryGanugula Sri Harshan 16BEC0162Nessuna valutazione finora
- ch 5 TRAJECTORY(1)Documento20 paginech 5 TRAJECTORY(1)Jh wNessuna valutazione finora
- IntroMDsimulations WGwebinar 01nov2017Documento76 pagineIntroMDsimulations WGwebinar 01nov2017Rizal SinagaNessuna valutazione finora
- Dynamics - Assignment 2Documento3 pagineDynamics - Assignment 2Kirk Daniel ObregonNessuna valutazione finora
- Single Axis Text I J Mic 08075 FinalDocumento26 pagineSingle Axis Text I J Mic 08075 Finalali almorsedNessuna valutazione finora
- Variable Input Speed Approach For Improving The Output Motion Characteristics of Watt-Type Presses 2002Documento16 pagineVariable Input Speed Approach For Improving The Output Motion Characteristics of Watt-Type Presses 2002Bilal OraikNessuna valutazione finora
- Solution 2Documento5 pagineSolution 2Paulina MarquezNessuna valutazione finora
- Ume805 2Documento2 pagineUme805 2Raunaq SinghNessuna valutazione finora
- Mech_2_Lecture_2 (1)Documento36 pagineMech_2_Lecture_2 (1)BADR ESLAMNessuna valutazione finora
- Mid Term 2012Documento7 pagineMid Term 2012Chachi CNessuna valutazione finora
- Internship Report of Northern Power GeneDocumento2 pagineInternship Report of Northern Power GeneparvejNessuna valutazione finora
- Kinematics 1-D Physics AssignmentDocumento6 pagineKinematics 1-D Physics AssignmentAmit RoutNessuna valutazione finora
- Control of Variable Pitch QuadrotorsDocumento6 pagineControl of Variable Pitch QuadrotorsTomislav SertićNessuna valutazione finora
- Robotics I: 2R Planar Robot Motion AnalysisDocumento1 paginaRobotics I: 2R Planar Robot Motion Analysisasalifew belachewNessuna valutazione finora
- Test02 SolDocumento11 pagineTest02 Solnareshsuja123Nessuna valutazione finora
- TrajectoryDocumento47 pagineTrajectoryRamkumar RamaiahNessuna valutazione finora
- Orbit Determination Accuracy RequirementDocumento16 pagineOrbit Determination Accuracy RequirementFrancisco CarvalhoNessuna valutazione finora
- Position Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotDocumento6 paginePosition Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotVictorSNessuna valutazione finora
- Kinematic Modeling and Verification For A SCARA Robot: Chenhuan Feng, Guanbin Gao, Yongli CaoDocumento4 pagineKinematic Modeling and Verification For A SCARA Robot: Chenhuan Feng, Guanbin Gao, Yongli Caoसन्तोस दाहालNessuna valutazione finora
- Question Bank - NDocumento3 pagineQuestion Bank - NPankaj DabadeNessuna valutazione finora
- A Complete Course in Physics (Graphs) - First EditionDa EverandA Complete Course in Physics (Graphs) - First EditionNessuna valutazione finora
- Robot Manipulators: Modeling, Performance Analysis and ControlDa EverandRobot Manipulators: Modeling, Performance Analysis and ControlNessuna valutazione finora
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportDa EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNessuna valutazione finora
- Characteristic Modes: Theory and Applications in Antenna EngineeringDa EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNessuna valutazione finora
- 10 1109@QoMEX 2017 7965686Documento6 pagine10 1109@QoMEX 2017 7965686P HAMSA DATTANessuna valutazione finora
- Information Theory and Coding WorkDocumento75 pagineInformation Theory and Coding WorkP HAMSA DATTANessuna valutazione finora
- Get HFSS Password for Free or Pay to UnlockDocumento1 paginaGet HFSS Password for Free or Pay to UnlockAchmadN.FauzieNessuna valutazione finora
- GprsDocumento7 pagineGprsP HAMSA DATTANessuna valutazione finora
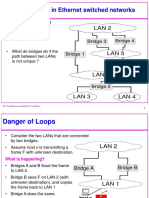
- Need For Routing in Ethernet Switched NetworksDocumento27 pagineNeed For Routing in Ethernet Switched NetworksP HAMSA DATTANessuna valutazione finora
- LAB4Documento6 pagineLAB4P HAMSA DATTANessuna valutazione finora
- LAB MANUAL ADSlatest PDFDocumento62 pagineLAB MANUAL ADSlatest PDFP HAMSA DATTANessuna valutazione finora
- Voice Over IP OverviewDocumento24 pagineVoice Over IP OverviewQuang LeNessuna valutazione finora
- ProgramsDocumento24 pagineProgramsP HAMSA DATTA0% (1)
- Digital Assignment - 3: Digital Logic Design LabDocumento13 pagineDigital Assignment - 3: Digital Logic Design LabP HAMSA DATTANessuna valutazione finora
- MC Exam ProgramsDocumento21 pagineMC Exam ProgramsP HAMSA DATTANessuna valutazione finora
- Stepper Motor PDFDocumento49 pagineStepper Motor PDFP HAMSA DATTANessuna valutazione finora
- ch5 Hydraulic and Pneumatic Actuators PDFDocumento30 paginech5 Hydraulic and Pneumatic Actuators PDFP HAMSA DATTANessuna valutazione finora
- The Office Marathon NavigationDocumento8 pagineThe Office Marathon NavigationP HAMSA DATTANessuna valutazione finora
- 7.mitcoe, Pune SasDocumento4 pagine7.mitcoe, Pune SasP HAMSA DATTANessuna valutazione finora
- Integration Formulas: 1. Common IntegralsDocumento5 pagineIntegration Formulas: 1. Common IntegralssiegherrNessuna valutazione finora
- Verilog HDL - Samir PalnitkarDocumento403 pagineVerilog HDL - Samir PalnitkarSameer RaichurNessuna valutazione finora
- Datasheet BCM2835 ARM PeripheralsDocumento205 pagineDatasheet BCM2835 ARM PeripheralsrickyjamesNessuna valutazione finora
- Mod 3Documento7 pagineMod 3billintonesNessuna valutazione finora
- Identification Markings for Fasteners GuideDocumento87 pagineIdentification Markings for Fasteners GuideasdfagNessuna valutazione finora
- Akron Brass CatalogDocumento236 pagineAkron Brass CatalogDaniel RodasNessuna valutazione finora
- Thermowave Competence Refrigeration enDocumento21 pagineThermowave Competence Refrigeration enTechnill Serviços e RepresentaçõesNessuna valutazione finora
- Structural Reliability FrameworkDocumento65 pagineStructural Reliability FrameworkkhairurNessuna valutazione finora
- CHAPTER 6 - Design of Knuckle Joint, Sleeve and Cotter JointDocumento34 pagineCHAPTER 6 - Design of Knuckle Joint, Sleeve and Cotter JointVignesan MechNessuna valutazione finora
- Maquinaria Naval Parte A-DDocumento185 pagineMaquinaria Naval Parte A-DraulbrlunaNessuna valutazione finora
- Genie Scc755psDocumento2 pagineGenie Scc755psWellington Xavier Pazmiño RodríguezNessuna valutazione finora
- Production and Industrial EngineeringDocumento27 pagineProduction and Industrial EngineeringShivangi MishraNessuna valutazione finora
- B30D 4Documento150 pagineB30D 4Teknik MakinaNessuna valutazione finora
- Erp 2009/125/ec (50 HZ) Erp 2009/125/ec (50 HZ) Erp 2009/125/ec (50 HZ) Erp 2009/125/ec (50 HZ) Erp 2009/125/ec (50 HZ)Documento2 pagineErp 2009/125/ec (50 HZ) Erp 2009/125/ec (50 HZ) Erp 2009/125/ec (50 HZ) Erp 2009/125/ec (50 HZ) Erp 2009/125/ec (50 HZ)José Ramón Devan DevanNessuna valutazione finora
- M19 GPSA TermodinámicaDocumento34 pagineM19 GPSA TermodinámicaSanchez LeilaNessuna valutazione finora
- Mechanism and Robot Kinematics: Anirvan DasguptaDocumento122 pagineMechanism and Robot Kinematics: Anirvan Dasguptaसुमित शर्माNessuna valutazione finora
- Wire Wizard Catalogue AUDocumento28 pagineWire Wizard Catalogue AUpotblakNessuna valutazione finora
- STM WDocumento18 pagineSTM WEdgardo GambandeNessuna valutazione finora
- The Influence of Compressibility On The Aerodynamics of An Inverted Wing in Ground EffectDocumento12 pagineThe Influence of Compressibility On The Aerodynamics of An Inverted Wing in Ground EffectSamson Paul PintoNessuna valutazione finora
- Probset4. EnergybalancesDocumento4 pagineProbset4. EnergybalancesUmmu Qurratul Aini MansorNessuna valutazione finora
- Unit 4Documento36 pagineUnit 4hisuresh196Nessuna valutazione finora
- CFD Simulation of Cross-Ventilation For A Generic IsolatedDocumento14 pagineCFD Simulation of Cross-Ventilation For A Generic IsolatedMohamad HashemNessuna valutazione finora
- GMC Truck NOS Parts List for 1941-1974 ModelsDocumento7 pagineGMC Truck NOS Parts List for 1941-1974 ModelsErick Quan LunaNessuna valutazione finora
- Turbine Control Operation StrategyDocumento16 pagineTurbine Control Operation Strategykavish malakaNessuna valutazione finora
- Composite Filled Composite Circular Column DesignDocumento1 paginaComposite Filled Composite Circular Column DesignAli SamaniNessuna valutazione finora
- Kit de Joint de Verin CaterpillarDocumento2 pagineKit de Joint de Verin CaterpillarzephyrinNessuna valutazione finora
- Fluid Mechanics Test and Exam DetailsDocumento8 pagineFluid Mechanics Test and Exam DetailsDiego FungNessuna valutazione finora
- High-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393Documento86 pagineHigh-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393DNH RND - VijaykumarNessuna valutazione finora
- CAMON C8 Rotavator PowerSafe DiagramDocumento16 pagineCAMON C8 Rotavator PowerSafe DiagramDomNessuna valutazione finora
- Alkylation Complex Start Up Plan: ObjectivesDocumento10 pagineAlkylation Complex Start Up Plan: ObjectivesBikas SahaNessuna valutazione finora
- (Datasheet) Eriks - Ketron Peek-1000Documento2 pagine(Datasheet) Eriks - Ketron Peek-1000Carlos AlbertoNessuna valutazione finora
- 4 UreviewDocumento34 pagine4 Ureviewumchemist2Nessuna valutazione finora
- Lift Boat Gear Lube: Typical Observations Product DescriptionDocumento1 paginaLift Boat Gear Lube: Typical Observations Product DescriptionRomankoNessuna valutazione finora
- Miller Spectrum 875 XtremeDocumento4 pagineMiller Spectrum 875 XtremeomaralihasNessuna valutazione finora