Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Schematic máy điệnDocumento1 paginaSchematic máy điệnKhương NguyễnNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Seyedzadeh2018 Article MachineLearningForEstimationOfDocumento20 pagineSeyedzadeh2018 Article MachineLearningForEstimationOfJeevan KaranamNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Neural Networks Optimization Through Gen PDFDocumento46 pagineNeural Networks Optimization Through Gen PDFKhương NguyễnNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Understanding and Coding Neural Networks From Scratch in Python and RDocumento12 pagineUnderstanding and Coding Neural Networks From Scratch in Python and RKhương NguyễnNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- EFBS - Glossary - UNIT 04Documento2 pagineEFBS - Glossary - UNIT 04Khương NguyễnNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- (LIST) Adult VaccinationsDocumento4 pagine(LIST) Adult VaccinationsLeslie MartinezNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Benchmarking The Performance of Solar Installers and Rooftop Photovoltaic Installations in CaliforniaDocumento17 pagineBenchmarking The Performance of Solar Installers and Rooftop Photovoltaic Installations in CaliforniaKhương NguyễnNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Neural Networks Optimization Through Gen PDFDocumento46 pagineNeural Networks Optimization Through Gen PDFKhương NguyễnNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Qualcomm Careers - Job DetailDocumento4 pagineQualcomm Careers - Job DetailKhương NguyễnNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- THZ Focal Plane Arrays For High Sensitivity Direct Detection of Excised Tissue CharacteristicsDocumento6 pagineTHZ Focal Plane Arrays For High Sensitivity Direct Detection of Excised Tissue CharacteristicsKhương NguyễnNessuna valutazione finora
- AC365 2010 Acceptance Criteria For BIPV Roof Modules and Panels (En)Documento6 pagineAC365 2010 Acceptance Criteria For BIPV Roof Modules and Panels (En)Khương NguyễnNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- 7-Segment LED DesignDocumento1 pagina7-Segment LED DesignKhương NguyễnNessuna valutazione finora
- 60593Documento35 pagine60593Khương NguyễnNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- What Is The Reason of DC Harmonics in Grid-Connected ConvertersDocumento3 pagineWhat Is The Reason of DC Harmonics in Grid-Connected ConvertersKhương NguyễnNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Linking Words PDFDocumento2 pagineLinking Words PDFmanojkhadka23Nessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Commonsense Leadership in The WorkplaceDocumento25 pagineCommonsense Leadership in The WorkplaceKhương NguyễnNessuna valutazione finora
- Sic MosfetDocumento6 pagineSic MosfetKhương NguyễnNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- SEPICDocumento11 pagineSEPICKarla BeatrizNessuna valutazione finora
- Computer-Aided Recloser Applications For Distribution SystemsDocumento6 pagineComputer-Aided Recloser Applications For Distribution SystemsKhương NguyễnNessuna valutazione finora
- GuestSpeaker 2.10.17 SPP UofA RegulationDocumento33 pagineGuestSpeaker 2.10.17 SPP UofA RegulationKhương NguyễnNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- SEPICDocumento9 pagineSEPICfalcon_72Nessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Sepic Converter Design and Operation: by Gregory SharpDocumento21 pagineSepic Converter Design and Operation: by Gregory SharpSingam SridharNessuna valutazione finora
- VEF 2.0 AnnouncementDocumento4 pagineVEF 2.0 AnnouncementKhương NguyễnNessuna valutazione finora
- Sepic AnalysisDocumento48 pagineSepic Analysisanshul234Nessuna valutazione finora
- Midterm Study AnswerDocumento9 pagineMidterm Study AnswerKhương NguyễnNessuna valutazione finora
- Communication Networks ExampleDocumento19 pagineCommunication Networks ExampleKhương NguyễnNessuna valutazione finora
- Communication Networks Project ExplanationDocumento4 pagineCommunication Networks Project ExplanationKhương NguyễnNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Canh Bao Som Chay RungDocumento86 pagineCanh Bao Som Chay RungKhương NguyễnNessuna valutazione finora
- Properties of Matter ReviewDocumento8 pagineProperties of Matter Reviewapi-290100812Nessuna valutazione finora
- YellowstoneDocumento1 paginaYellowstoneOana GalbenuNessuna valutazione finora
- Clinical Case StudyDocumento20 pagineClinical Case Studyapi-252004748Nessuna valutazione finora
- c083c282a43655ec69532f2704c3993aDocumento12 paginec083c282a43655ec69532f2704c3993aAneilRandyRamdialNessuna valutazione finora
- Upaam 1135891 202105060749199700Documento18 pagineUpaam 1135891 202105060749199700Kartik KapoorNessuna valutazione finora
- Ii 2015 1Documento266 pagineIi 2015 1tuni santeNessuna valutazione finora
- ANS: (2.59807m/s2 Horizontal) (1.5m/s2 Vertical) (12.93725 Degree Angle That The Water Surface Makes With The Horizontal)Documento5 pagineANS: (2.59807m/s2 Horizontal) (1.5m/s2 Vertical) (12.93725 Degree Angle That The Water Surface Makes With The Horizontal)Lolly UmaliNessuna valutazione finora
- Kwasaki ZX10R 16Documento101 pagineKwasaki ZX10R 16OliverNessuna valutazione finora
- St. John's Wort: Clinical OverviewDocumento14 pagineSt. John's Wort: Clinical OverviewTrismegisteNessuna valutazione finora
- Bhagwati School Strap Report AnalysisDocumento60 pagineBhagwati School Strap Report AnalysisReverse Minded100% (1)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- JHS 182Documento137 pagineJHS 182harbhajan singhNessuna valutazione finora
- Science Involved in Floating Paper Clip Science Experiment GuidelinesDocumento4 pagineScience Involved in Floating Paper Clip Science Experiment GuidelinesSHIELA RUBIONessuna valutazione finora
- A Textual Introduction To Acarya Vasuvan PDFDocumento3 pagineA Textual Introduction To Acarya Vasuvan PDFJim LeeNessuna valutazione finora
- AR BuildingDocumento819 pagineAR BuildingShithin KrishnanNessuna valutazione finora
- Kuiz1 210114Documento12 pagineKuiz1 210114Vincent HoNessuna valutazione finora
- Vallarpadam Terminal ChallengesDocumento3 pagineVallarpadam Terminal Challengespriya rajeev100% (1)
- Chemical Bonds WorksheetDocumento2 pagineChemical Bonds WorksheetJewel Mae MercadoNessuna valutazione finora
- Firestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsDocumento77 pagineFirestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsRed JohnNessuna valutazione finora
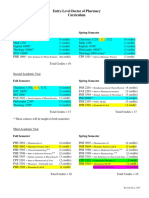
- Pharmd CurriculumDocumento18 paginePharmd Curriculum5377773Nessuna valutazione finora
- Kodak Easyshare Z712 Is Zoom Digital Camera: User'S GuideDocumento75 pagineKodak Easyshare Z712 Is Zoom Digital Camera: User'S GuideIronko PepeNessuna valutazione finora
- Physics 101Documento21 paginePhysics 101Kuna KunavathiNessuna valutazione finora
- Digital Signal Processing: B.E Ece (5Th Semester)Documento17 pagineDigital Signal Processing: B.E Ece (5Th Semester)Saatwat CoolNessuna valutazione finora
- RUKUS April 2011Documento40 pagineRUKUS April 2011RUKUS Magazine100% (2)
- Modified Phosphate and Silica Waste in Pigment PaintDocumento12 pagineModified Phosphate and Silica Waste in Pigment PaintDani M RamdhaniNessuna valutazione finora
- Chapter 5 AGVDocumento76 pagineChapter 5 AGVQuỳnh NguyễnNessuna valutazione finora
- Comparison of 3 Tests To Detect Acaricide ResistanDocumento4 pagineComparison of 3 Tests To Detect Acaricide ResistanMarvelous SungiraiNessuna valutazione finora
- TranscriptDocumento1 paginaTranscriptapi-310448954Nessuna valutazione finora
- PTP S3Documento8 paginePTP S3Yongyin SHENGNessuna valutazione finora
- Tuesday, 16 November 2021 - Afternoon Discovering ElectronicsDocumento20 pagineTuesday, 16 November 2021 - Afternoon Discovering Electronicsnvmalt070Nessuna valutazione finora
- Typical Section SC 10: Kerajaan MalaysiaDocumento1 paginaTypical Section SC 10: Kerajaan MalaysiaAisyah Atiqah KhalidNessuna valutazione finora
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsDa EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsValutazione: 3.5 su 5 stelle3.5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDa EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeValutazione: 4.5 su 5 stelle4.5/5 (9)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDa EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialValutazione: 3.5 su 5 stelle3.5/5 (3)
- Teach Yourself Electricity and Electronics, 6th EditionDa EverandTeach Yourself Electricity and Electronics, 6th EditionValutazione: 3.5 su 5 stelle3.5/5 (15)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDa EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesValutazione: 5 su 5 stelle5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDa EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosValutazione: 5 su 5 stelle5/5 (1)