Potrebbero piacerti anche
- Britney Spears - A Historia Por Trás Do SucessoDocumento18 pagineBritney Spears - A Historia Por Trás Do SucessoRuan MillerNessuna valutazione finora
- LIVRO O PROCESSO DIAGNÓSTICO E AS TÉCNICAS PROJETIVAS - OdtDocumento2 pagineLIVRO O PROCESSO DIAGNÓSTICO E AS TÉCNICAS PROJETIVAS - OdtMarianna Matos0% (1)
- 1 - UFCD6054-Programação BásicaDocumento24 pagine1 - UFCD6054-Programação Básicaprof.afreis50% (2)
- Relatorio Da PAPDocumento18 pagineRelatorio Da PAPnuno silvestreNessuna valutazione finora
- Critérios de Aeronavegabilidade - Aviões Ultraleves CS-VLADocumento20 pagineCritérios de Aeronavegabilidade - Aviões Ultraleves CS-VLAErica Frota FNessuna valutazione finora
- Simulado - Fundamentos de RedesDocumento8 pagineSimulado - Fundamentos de Redesramonvirtual100% (1)
- TIC 7 Fichanº1Documento2 pagineTIC 7 Fichanº1Teresa RodriguesNessuna valutazione finora
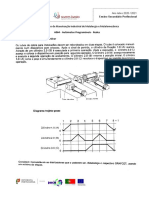
- PROJETO 5 - Dispositivo de RebordearDocumento1 paginaPROJETO 5 - Dispositivo de RebordearPaulo GonçalvesNessuna valutazione finora
- Ifá É para Todos Material DidaticoDocumento186 pagineIfá É para Todos Material DidaticoAlexandre Mello75% (4)
- Pesquisa Geológica e Exploração Mineira PDFDocumento128 paginePesquisa Geológica e Exploração Mineira PDFCassimoNessuna valutazione finora
- Criando Arquivo Modelo para Cartões de Visita No InDesignDocumento4 pagineCriando Arquivo Modelo para Cartões de Visita No InDesignmhoustardaNessuna valutazione finora
- 5 - Regulamento InternoDocumento5 pagine5 - Regulamento InternoSuper NativeNessuna valutazione finora
- Analise de Equipamentos Informaticos PDFDocumento153 pagineAnalise de Equipamentos Informaticos PDFmclsantos0% (1)
- PLANIFICA ÇO DE ATIVIDADES EM Ambientes HibridosDocumento4 paginePLANIFICA ÇO DE ATIVIDADES EM Ambientes HibridosmariajoaofonsecaNessuna valutazione finora
- Autómatos Programáveis RedesDocumento2 pagineAutómatos Programáveis RedesAntónio CarmoNessuna valutazione finora
- Fichas MacrosDocumento8 pagineFichas MacrosLuis AlmeidaNessuna valutazione finora
- Planificações STC 5Documento1 paginaPlanificações STC 5nunoNessuna valutazione finora
- Ficha Formativa 1 Módulo 2Documento3 pagineFicha Formativa 1 Módulo 2pereiragNessuna valutazione finora
- Domótica - Principais CaracteristicasDocumento8 pagineDomótica - Principais Caracteristicasmagante50Nessuna valutazione finora
- Relatorio Da PAP Rodrigo TavaresDocumento42 pagineRelatorio Da PAP Rodrigo TavaresRodrigo TavaresNessuna valutazione finora
- Manual GEI Eletronica - Fundamental - Mod4 - PDFDocumento66 pagineManual GEI Eletronica - Fundamental - Mod4 - PDFxarly100% (1)
- Computadores PDFDocumento4 pagineComputadores PDFVictor ParanhosNessuna valutazione finora
- Imei Modulo 3 SebentaDocumento12 pagineImei Modulo 3 SebentaElisabete AguiarNessuna valutazione finora
- Ficha de Arduino 2018 4Documento4 pagineFicha de Arduino 2018 4Nuno GonçalvesNessuna valutazione finora
- Ficha Avaliação-UFCD 0134Documento2 pagineFicha Avaliação-UFCD 0134CristinaNessuna valutazione finora
- Teste de TICDocumento7 pagineTeste de TICNathan Petreli Ad'aNessuna valutazione finora
- Técnicas de Diagnóstico e Reparação de AvariasDocumento23 pagineTécnicas de Diagnóstico e Reparação de AvariasVitor CardosoNessuna valutazione finora
- Sebenta Do Módulo 1 - CEF - TICDocumento18 pagineSebenta Do Módulo 1 - CEF - TICrnamaralNessuna valutazione finora
- Ficha de Trabalho Nº1Documento3 pagineFicha de Trabalho Nº1informaticaaulasNessuna valutazione finora
- Relatorio de PaPDocumento29 pagineRelatorio de PaPGonçalo GameiroNessuna valutazione finora
- Prog Tic CefDocumento4 pagineProg Tic CefElsa Carina Martins BorgesNessuna valutazione finora
- Testeteorico Excel Setembro 2017Documento3 pagineTesteteorico Excel Setembro 2017Jaime MartinsNessuna valutazione finora
- Memórias - IMEI - Módulo IIDocumento47 pagineMemórias - IMEI - Módulo IIBiaRosad0Nessuna valutazione finora
- Cef ImcDocumento1 paginaCef ImcfilipaschoolNessuna valutazione finora
- 3 TiposdeManutençãoDocumento26 pagine3 TiposdeManutençãoMaria RosadoNessuna valutazione finora
- Planificação Tic 8º AnoDocumento3 paginePlanificação Tic 8º AnoElisabete Silva100% (1)
- Proposta Planificação 6ºanoDocumento3 pagineProposta Planificação 6ºanoelizabete_semedo822Nessuna valutazione finora
- Syllabus ECDL Core V4Documento33 pagineSyllabus ECDL Core V4Jose Manuel BarrosNessuna valutazione finora
- Ergonomia TICDocumento7 pagineErgonomia TICVirgínia CouceiroNessuna valutazione finora
- STC NG1 DR1Documento2 pagineSTC NG1 DR1albertojsousaNessuna valutazione finora
- Teste de Recuperação - Módulo1 - SDACDocumento4 pagineTeste de Recuperação - Módulo1 - SDACHugo AmaralNessuna valutazione finora
- Detalhe Da UFCD: 4564 - Gestão Da Manutenção - IntroduçãoDocumento2 pagineDetalhe Da UFCD: 4564 - Gestão Da Manutenção - IntroduçãoJoão Tao PortugalNessuna valutazione finora
- Cronologia Dos TelemóveisDocumento3 pagineCronologia Dos TelemóveisxanaaaNessuna valutazione finora
- Introdução TIC Hardware e SoftwareDocumento62 pagineIntrodução TIC Hardware e SoftwareAna Borges FonsecaNessuna valutazione finora
- STC ng1 - RA4 Máquina de Lavar RoupaDocumento4 pagineSTC ng1 - RA4 Máquina de Lavar RoupaJoão Bragança50% (2)
- Investigar e Pesquisar TICDocumento20 pagineInvestigar e Pesquisar TICVirgínia CouceiroNessuna valutazione finora
- D5 - MANUAL - 0749 - Arquitectura de ComputadoresDocumento29 pagineD5 - MANUAL - 0749 - Arquitectura de ComputadoresTécnicasNessuna valutazione finora
- Fichas de Avalição MACs 10º AnoDocumento4 pagineFichas de Avalição MACs 10º AnoJimi CostaNessuna valutazione finora
- A Revolução Das Telecomunicações e o Seu ImpactoDocumento14 pagineA Revolução Das Telecomunicações e o Seu ImpactoBeatriz Brilha100% (1)
- FichaFormativa10 Módulo2Documento7 pagineFichaFormativa10 Módulo2Maria RosadoNessuna valutazione finora
- Módulo 7 - Amplificadores OperacionaisDocumento64 pagineMódulo 7 - Amplificadores OperacionaisMargarida PaixãoNessuna valutazione finora
- Aula # 8 Autômatos ProgramáveisDocumento38 pagineAula # 8 Autômatos ProgramáveislkarolinoNessuna valutazione finora
- UFCD 0770 - ManualDocumento17 pagineUFCD 0770 - ManualpfreixoNessuna valutazione finora
- 02 - Arquitetura Interna Do ComputadorDocumento17 pagine02 - Arquitetura Interna Do ComputadorFabio Faria100% (2)
- Ficha Diagnostica M5Documento4 pagineFicha Diagnostica M5Teresa OliveiraNessuna valutazione finora
- Ficha de Avaliação DiagnósticaDocumento4 pagineFicha de Avaliação Diagnósticaanenias@Nessuna valutazione finora
- Teste Eletro Mod-4Documento6 pagineTeste Eletro Mod-4Manuel AganteNessuna valutazione finora
- Ficha 1 e 2 Do WordDocumento3 pagineFicha 1 e 2 Do WordhelenaNessuna valutazione finora
- Módulo 7 - FicheirosDocumento5 pagineMódulo 7 - FicheirosAmélia Costa PereiraNessuna valutazione finora
- Domótica x10Documento16 pagineDomótica x10johnNessuna valutazione finora
- Ficha MsdosDocumento3 pagineFicha MsdosLuís FernandesNessuna valutazione finora
- Tecnologia e Processos de Mecânica - Módulo 1 - MetrologiaDocumento27 pagineTecnologia e Processos de Mecânica - Módulo 1 - MetrologiapauloNessuna valutazione finora
- TIC - Ficha de Trabalho Nº 8Documento4 pagineTIC - Ficha de Trabalho Nº 8lucas valezimNessuna valutazione finora
- Ficha Hierarquia de MemoriaDocumento11 pagineFicha Hierarquia de MemoriadareenzoNessuna valutazione finora
- Bacula (2ª edição): Ferramenta Livre de BackupDa EverandBacula (2ª edição): Ferramenta Livre de BackupNessuna valutazione finora
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoDa EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNessuna valutazione finora
- Motores ElétricosDocumento26 pagineMotores ElétricosPaulo GonçalvesNessuna valutazione finora
- Ficha 5 - NB - Porta AutomaticaDocumento11 pagineFicha 5 - NB - Porta AutomaticaPaulo GonçalvesNessuna valutazione finora
- PROJETO 66 - Tratamento de SuperfícieDocumento2 paginePROJETO 66 - Tratamento de SuperfíciePaulo GonçalvesNessuna valutazione finora
- Ficha 3 - NB - Semaforo - Det - VelocidadeDocumento4 pagineFicha 3 - NB - Semaforo - Det - VelocidadePaulo GonçalvesNessuna valutazione finora
- Ficha 4 - NB - Simulação de MovimentoDocumento9 pagineFicha 4 - NB - Simulação de MovimentoPaulo GonçalvesNessuna valutazione finora
- Aulamotoreseltricos 161114153233Documento28 pagineAulamotoreseltricos 161114153233Paulo GonçalvesNessuna valutazione finora
- Motores ElétricosDocumento19 pagineMotores ElétricosPaulo GonçalvesNessuna valutazione finora
- Projeto 12 - Torno AutomáticoDocumento2 pagineProjeto 12 - Torno AutomáticoPaulo GonçalvesNessuna valutazione finora
- PROJETO 11 - Sistema de Deteção e Triagem de GarrafasDocumento2 paginePROJETO 11 - Sistema de Deteção e Triagem de GarrafasPaulo GonçalvesNessuna valutazione finora
- PROJETO 7 - Dispositivo de Marcação de PeçasDocumento1 paginaPROJETO 7 - Dispositivo de Marcação de PeçasPaulo GonçalvesNessuna valutazione finora
- PROJETO 55 - Sistema de FuraçãoDocumento2 paginePROJETO 55 - Sistema de FuraçãoPaulo GonçalvesNessuna valutazione finora
- PROJETO 10 - Dispositivo de EstampagemDocumento1 paginaPROJETO 10 - Dispositivo de EstampagemPaulo GonçalvesNessuna valutazione finora
- PROJETO 12 - Processo de LavagemDocumento3 paginePROJETO 12 - Processo de LavagemPaulo GonçalvesNessuna valutazione finora
- PROJETO 9 - Sistema de FuraçãoDocumento2 paginePROJETO 9 - Sistema de FuraçãoPaulo GonçalvesNessuna valutazione finora
- PROJETO 2 - Dispositivo Separador de BolasDocumento1 paginaPROJETO 2 - Dispositivo Separador de BolasPaulo GonçalvesNessuna valutazione finora
- PROJETO 8 - Dispositivo para Controlo de Peso para Latas de AerossolDocumento1 paginaPROJETO 8 - Dispositivo para Controlo de Peso para Latas de AerossolPaulo GonçalvesNessuna valutazione finora
- PROJETO 3 - Dispositivo para Enchimento de Pedras de IgniçãoDocumento1 paginaPROJETO 3 - Dispositivo para Enchimento de Pedras de IgniçãoPaulo GonçalvesNessuna valutazione finora
- PROJETO 4 - Triagem de CaixasDocumento2 paginePROJETO 4 - Triagem de CaixasPaulo GonçalvesNessuna valutazione finora
- PROJETO 6 - Limpeza de Peças em Banho de DecapagemDocumento2 paginePROJETO 6 - Limpeza de Peças em Banho de DecapagemPaulo GonçalvesNessuna valutazione finora
- PROJETO 4 - Triagem de CaixasDocumento2 paginePROJETO 4 - Triagem de CaixasPaulo GonçalvesNessuna valutazione finora
- PROJETO 12 - Processo de LavagemDocumento3 paginePROJETO 12 - Processo de LavagemPaulo GonçalvesNessuna valutazione finora
- PROJETO 1 - Dispositivo de Gravação Com Alimentação AutomáticaDocumento1 paginaPROJETO 1 - Dispositivo de Gravação Com Alimentação AutomáticaPaulo GonçalvesNessuna valutazione finora
- PROJETO 11 - Sistema de Deteção e Triagem de GarrafasDocumento2 paginePROJETO 11 - Sistema de Deteção e Triagem de GarrafasPaulo GonçalvesNessuna valutazione finora
- PROJETO 8 - Dispositivo para Controlo de Peso para Latas de AerossolDocumento1 paginaPROJETO 8 - Dispositivo para Controlo de Peso para Latas de AerossolPaulo GonçalvesNessuna valutazione finora
- PROJETO 2 - Dispositivo Separador de BolasDocumento1 paginaPROJETO 2 - Dispositivo Separador de BolasPaulo GonçalvesNessuna valutazione finora
- PROJETO 5 - Dispositivo de RebordearDocumento1 paginaPROJETO 5 - Dispositivo de RebordearPaulo GonçalvesNessuna valutazione finora
- PROJETO 7 - Dispositivo de Marcação de PeçasDocumento1 paginaPROJETO 7 - Dispositivo de Marcação de PeçasPaulo GonçalvesNessuna valutazione finora
- PROJETO 9 - Sistema de FuraçãoDocumento1 paginaPROJETO 9 - Sistema de FuraçãoPaulo GonçalvesNessuna valutazione finora
- PROJETO 4.0 - Triagem de CaixasDocumento1 paginaPROJETO 4.0 - Triagem de CaixasPaulo GonçalvesNessuna valutazione finora
- Reconhecimento de Linha de Água para Medição de CaladoDocumento8 pagineReconhecimento de Linha de Água para Medição de CaladoSamuel SarNessuna valutazione finora
- A Importância Da Família PDFDocumento7 pagineA Importância Da Família PDFWellington FariaNessuna valutazione finora
- 11 FT 2 Frei Luis Sousa 2perDocumento3 pagine11 FT 2 Frei Luis Sousa 2perHenrique AlvesNessuna valutazione finora
- Os 15 Melhores Poemas de Paulo LeminskiDocumento7 pagineOs 15 Melhores Poemas de Paulo LeminskiThiagoDaflonNessuna valutazione finora
- Conjunções - TDDocumento2 pagineConjunções - TDEder DantasNessuna valutazione finora
- VEIDDA555Documento2 pagineVEIDDA555Veidda AmaralNessuna valutazione finora
- Edital Verticalizado PCCE PDFDocumento5 pagineEdital Verticalizado PCCE PDFJoicelancaster LancasterNessuna valutazione finora
- Teste de MatemáticaDocumento7 pagineTeste de MatemáticaAlyce Maria PorteladaNessuna valutazione finora
- EDITAL N.º 331 2020 PROG UEMA Resultado Final CCSA Ciencias Sociais7429Documento2 pagineEDITAL N.º 331 2020 PROG UEMA Resultado Final CCSA Ciencias Sociais7429SabrinaArecoNessuna valutazione finora
- Lista 4Documento4 pagineLista 4gabinoronha1909Nessuna valutazione finora
- Erros No Preenchimento Da Planilha de Custos de Obras Admitem o Saneamento Dessas Falhas Ou Determinam A Imediata Desclassificação Das PropostasDocumento30 pagineErros No Preenchimento Da Planilha de Custos de Obras Admitem o Saneamento Dessas Falhas Ou Determinam A Imediata Desclassificação Das PropostasJefferson Bastos de OliveiraNessuna valutazione finora
- Maria Lucia Medeiros PDFDocumento20 pagineMaria Lucia Medeiros PDFluciana_kraemer498100% (1)
- Alto e Baixo ContextoDocumento19 pagineAlto e Baixo ContextoAnabela Reis33% (3)
- Humanas 34Documento5 pagineHumanas 34cleide mendesNessuna valutazione finora
- 11783-Texto Do Artigo-43540-1-10-20191001Documento5 pagine11783-Texto Do Artigo-43540-1-10-20191001andressa.estevesNessuna valutazione finora
- Berenice CoutoDocumento13 pagineBerenice CoutoMayéwe AlvesNessuna valutazione finora
- Manual Básico: Séries FINEPIX S4500 Séries FINEPIX S4400 Séries FINEPIX S4300 Séries FINEPIX S4200Documento18 pagineManual Básico: Séries FINEPIX S4500 Séries FINEPIX S4400 Séries FINEPIX S4300 Séries FINEPIX S4200LeandroLopes PereiraNessuna valutazione finora
- Reiki Nível II A Transformação.Documento31 pagineReiki Nível II A Transformação.Débora Elisa ZanchettiNessuna valutazione finora
- CFT B 2008 Arrumador PDFDocumento14 pagineCFT B 2008 Arrumador PDFRenato Da CruzNessuna valutazione finora
- Apostila BDDocumento84 pagineApostila BDAlexandre BentoNessuna valutazione finora
- Questões Resolvidos - CisalhamentoDocumento10 pagineQuestões Resolvidos - CisalhamentoGustavo AguiarNessuna valutazione finora
- Compreensão e Produção Escrita em PortuguêsDocumento3 pagineCompreensão e Produção Escrita em PortuguêsFlavio SilvaNessuna valutazione finora
- V12-Ficha Tecnica Procediment Janeiro 18 2016Documento4 pagineV12-Ficha Tecnica Procediment Janeiro 18 2016markao_jcNessuna valutazione finora
- Aula Cogus ProntoDocumento18 pagineAula Cogus ProntoDaniela Dalke WeberNessuna valutazione finora