Potrebbero piacerti anche
- Power aware embedded systems design challengesDocumento26 paginePower aware embedded systems design challengesRam PrasathNessuna valutazione finora
- OpenwrtDocumento42 pagineOpenwrtSorin NeacsuNessuna valutazione finora
- About Software ToolsDocumento40 pagineAbout Software ToolsFurqon Madaz XskaMaticNessuna valutazione finora
- Capital Project Scheduling and Schedule ManagementDocumento31 pagineCapital Project Scheduling and Schedule Managementodunze1100% (4)
- Ufgs 01-31-19.05 - 20 Post Award MeetingsDocumento15 pagineUfgs 01-31-19.05 - 20 Post Award MeetingsSheryl BrionesNessuna valutazione finora
- ISO 9001 2008 Audit Questionnaire ChecklistDocumento5 pagineISO 9001 2008 Audit Questionnaire ChecklistAlina Walace67% (3)
- Foundation Course for Advanced Computer StudiesDa EverandFoundation Course for Advanced Computer StudiesNessuna valutazione finora
- 8080-8085 Assembly Language Programming IntelDocumento224 pagine8080-8085 Assembly Language Programming IntelAbhishek YadavNessuna valutazione finora
- OpenWrt Dev TutorialDocumento11 pagineOpenWrt Dev TutorialraphaelgavaNessuna valutazione finora
- Quality Course 2Documento282 pagineQuality Course 2Haery Sihombing100% (17)
- ST Sensor Connectivity IOT PDFDocumento87 pagineST Sensor Connectivity IOT PDFNguyen PhuongNessuna valutazione finora
- Software Requirements Specifications Template 2018Documento14 pagineSoftware Requirements Specifications Template 2018Abdullah Muhammad KuduNessuna valutazione finora
- Intel Microprocessor History: Ramzi Shihadeh AlqrainyDocumento48 pagineIntel Microprocessor History: Ramzi Shihadeh AlqrainyRamzi Alqrainy100% (2)
- Raspberry Pi 3 and BeagleBone Black For Engineers - UpSkill Learning 124Documento124 pagineRaspberry Pi 3 and BeagleBone Black For Engineers - UpSkill Learning 124Dragan IvanovNessuna valutazione finora
- Porting GuideDocumento4 paginePorting Guideboot_sectorzNessuna valutazione finora
- Z8 Assembly Language Programming Manual Dec80Documento176 pagineZ8 Assembly Language Programming Manual Dec80Colin JewisonNessuna valutazione finora
- Embd Course Pamplet - 3 - 4monthsDocumento2 pagineEmbd Course Pamplet - 3 - 4monthsThanigai Arasu RuthirakottiNessuna valutazione finora
- INF 4300 – Introduction to Hough TransformDocumento20 pagineINF 4300 – Introduction to Hough Transformr10aldinhoNessuna valutazione finora
- Hospital Management Class Xii Kashis and RiyaDocumento33 pagineHospital Management Class Xii Kashis and RiyaAjitesh AwasthiNessuna valutazione finora
- PIC32 Microcontrollers and the Digilent Chipkit: Introductory to Advanced ProjectsDa EverandPIC32 Microcontrollers and the Digilent Chipkit: Introductory to Advanced ProjectsValutazione: 5 su 5 stelle5/5 (1)
- Murach's C++ 2008 (PDFDrive)Documento592 pagineMurach's C++ 2008 (PDFDrive)Dan Pruteanu100% (1)
- IoT Protocols: Z-Wave and ThreadDocumento5 pagineIoT Protocols: Z-Wave and ThreadAnonymous lPvvgiQjRNessuna valutazione finora
- ARM Introduction-1Documento26 pagineARM Introduction-1040-NishanthNessuna valutazione finora
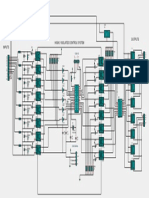
- Highly isolated control system with multiple digital and analog inputs and outputsDocumento1 paginaHighly isolated control system with multiple digital and analog inputs and outputsEliecerNessuna valutazione finora
- PLC Con Atmega328p PDFDocumento1 paginaPLC Con Atmega328p PDFJuan SanchezNessuna valutazione finora
- Quectel Umts&Lte Evb User Guide v2.1Documento45 pagineQuectel Umts&Lte Evb User Guide v2.1krishnakumar GNessuna valutazione finora
- SUP58M1 Mini Printer Technical Manual PDFDocumento64 pagineSUP58M1 Mini Printer Technical Manual PDFbernhartNessuna valutazione finora
- InterruptsDocumento34 pagineInterruptsJaney24100% (1)
- Star Thermal Printer Programmer's ManualDocumento117 pagineStar Thermal Printer Programmer's ManualKerzhanNessuna valutazione finora
- Booksim ManualDocumento7 pagineBooksim Manualshahje5Nessuna valutazione finora
- Verint S4100 Wireless Transmitter and Receiver - FactsheetDocumento4 pagineVerint S4100 Wireless Transmitter and Receiver - FactsheetmododanNessuna valutazione finora
- OO Case Studies With Patterns and C++Documento26 pagineOO Case Studies With Patterns and C++Imre TuskeNessuna valutazione finora
- Unit 1Documento124 pagineUnit 1RaviNessuna valutazione finora
- Fundamentals in Digital IC DesignDocumento16 pagineFundamentals in Digital IC DesignSiddharth PanditNessuna valutazione finora
- Olimexino STM32Documento19 pagineOlimexino STM32numero909Nessuna valutazione finora
- Virtual WireDocumento13 pagineVirtual WirePedro Nuno Sabugueiro OliveiraNessuna valutazione finora
- Nexgen 5000-System Overview PDFDocumento54 pagineNexgen 5000-System Overview PDFAravind HVNessuna valutazione finora
- nRF52840 PS v1.5Documento631 paginenRF52840 PS v1.5Benyamin Farzaneh AghajarieNessuna valutazione finora
- MSP430 Microcontroller Architecture GuideDocumento128 pagineMSP430 Microcontroller Architecture GuideasdsdNessuna valutazione finora
- 8086 Interrupts NewDocumento33 pagine8086 Interrupts NewVineeth Valiyaveedu Vijayan100% (1)
- Programming and Interfacing The 8051 MicrocontrollerDocumento9 pagineProgramming and Interfacing The 8051 Microcontrollernaveedhalamzai0% (2)
- 10.rtprogramming HandoutDocumento20 pagine10.rtprogramming HandoutTrishool NarayanasettyNessuna valutazione finora
- 10 Pthread ExamplesDocumento28 pagine10 Pthread ExamplesMadhu SudhanNessuna valutazione finora
- Keil User ManualDocumento26 pagineKeil User ManualRohal SahuNessuna valutazione finora
- R05 411104ertsDocumento8 pagineR05 411104ertsravitejakotiNessuna valutazione finora
- Debugging Assembly Code With GDBDocumento3 pagineDebugging Assembly Code With GDBmrcatyahoocomNessuna valutazione finora
- 16-Bit Computing: 16-Bit Architecture 16-Bit Application List of 16-Bit Cpus See Also ReferencesDocumento4 pagine16-Bit Computing: 16-Bit Architecture 16-Bit Application List of 16-Bit Cpus See Also ReferencesDanijel BuhinNessuna valutazione finora
- Bjarne StroustrupDocumento8 pagineBjarne StroustrupLavanyaNessuna valutazione finora
- The MSP430 Microcontroller SystemDocumento7 pagineThe MSP430 Microcontroller SystemArthu hNessuna valutazione finora
- Pic32 Osc Config v1.1Documento45 paginePic32 Osc Config v1.1harikrishna242424Nessuna valutazione finora
- 4 20ma ConverterDocumento159 pagine4 20ma Converteradilson.krommeNessuna valutazione finora
- S500 Datasheet V1.9Documento383 pagineS500 Datasheet V1.9Boyd MouritsenNessuna valutazione finora
- 1756 En2t PDFDocumento28 pagine1756 En2t PDFLuccaNessuna valutazione finora
- Embedded Sys. & Robotics WorkshopDocumento5 pagineEmbedded Sys. & Robotics WorkshopPriyanka SharmaNessuna valutazione finora
- Embedded Linux RealtimeDocumento76 pagineEmbedded Linux RealtimeLenon Raubach TuchtenhagenNessuna valutazione finora
- Threads FAQ From JguruDocumento127 pagineThreads FAQ From Jguruapi-3706318Nessuna valutazione finora
- International Journal of Embedded Systems and Applications (IJESA)Documento1 paginaInternational Journal of Embedded Systems and Applications (IJESA)ijesajournalNessuna valutazione finora
- ESP8266 Artnet To DMXDocumento13 pagineESP8266 Artnet To DMXJuan GarciaNessuna valutazione finora
- Exam Questions 2018Documento3 pagineExam Questions 2018naveen g cNessuna valutazione finora
- G350 M BusModuleDescriptionDocumento66 pagineG350 M BusModuleDescriptionmgugiNessuna valutazione finora
- 05190505Documento5 pagine05190505deepak.stoicNessuna valutazione finora
- Arduino Modbus Slave - JpmzometaDocumento2 pagineArduino Modbus Slave - JpmzometaRachel RowlandNessuna valutazione finora
- Embedded Syllabus With C ClassDocumento3 pagineEmbedded Syllabus With C ClassRakesh RakiNessuna valutazione finora
- Dell Inspirion 15 5551 Compal LA-B912P r1.0Documento42 pagineDell Inspirion 15 5551 Compal LA-B912P r1.0Warren DonaldsonNessuna valutazione finora
- ARM ArchitectureDocumento547 pagineARM ArchitectureAmrita BhattNessuna valutazione finora
- Maintenance Concept Definition - T-Mu-Am-06009-StDocumento15 pagineMaintenance Concept Definition - T-Mu-Am-06009-StFrank FanNessuna valutazione finora
- Resume Ather Sheikh-BADocumento5 pagineResume Ather Sheikh-BAAbhishek ShettarNessuna valutazione finora
- SRSExample WebappDocumento8 pagineSRSExample WebappRicha SagarNessuna valutazione finora
- IP Tracking'Documento12 pagineIP Tracking'ritesh singhNessuna valutazione finora
- 1.software Testing and Important TerminologyDocumento30 pagine1.software Testing and Important TerminologySamar FaresNessuna valutazione finora
- Guidance on Review and Approval of Novel Marine ConceptsDocumento34 pagineGuidance on Review and Approval of Novel Marine ConceptsZhenghua WangNessuna valutazione finora
- LMS SRSDocumento10 pagineLMS SRSAditya UparkarNessuna valutazione finora
- BME498 Project Requirements Guidelines 2020 21Documento9 pagineBME498 Project Requirements Guidelines 2020 21Hannah EngNessuna valutazione finora
- Theoretical BackgroundDocumento17 pagineTheoretical BackgroundNaval PatelNessuna valutazione finora
- Software Specification Requirement: Inventory Management SystemDocumento7 pagineSoftware Specification Requirement: Inventory Management SystemPranav Gupta100% (1)
- Final Project Documentation: Overview of ContentDocumento5 pagineFinal Project Documentation: Overview of ContentakashNessuna valutazione finora
- Asap Implementation MethodologyDocumento7 pagineAsap Implementation Methodologykulkarni_sameerNessuna valutazione finora
- The University of Lahore: Department of Computer Science& IT Midterm Examination Fall-2020 (SOLUTION)Documento5 pagineThe University of Lahore: Department of Computer Science& IT Midterm Examination Fall-2020 (SOLUTION)Asmat NiaziNessuna valutazione finora
- PSM 1 ReportDocumento45 paginePSM 1 Reportabdul raaufNessuna valutazione finora
- 2021 2022 CS200 ChapterII SRSDocumento41 pagine2021 2022 CS200 ChapterII SRSAhmed DammakNessuna valutazione finora
- FILE CAR Sale BuyDocumento37 pagineFILE CAR Sale BuyamitNessuna valutazione finora
- ISTQB Certified Tester Advanced Level - Test Manager ExamDocumento25 pagineISTQB Certified Tester Advanced Level - Test Manager ExamIuliana AndronacheNessuna valutazione finora
- Josiah G. Wandu: 2860 Shurburne Drive Alpharetta, Ga 30022Documento7 pagineJosiah G. Wandu: 2860 Shurburne Drive Alpharetta, Ga 30022SARVAGYA PANDEYNessuna valutazione finora
- Online Evaluation System Project ReportDocumento49 pagineOnline Evaluation System Project Reportnixon tjNessuna valutazione finora
- Section 01090 Reference StandardsDocumento3 pagineSection 01090 Reference StandardsAnonymous NR3qZ30Nessuna valutazione finora
- Design and Simulation of A Scada System Using Sysml and SimulinkDocumento6 pagineDesign and Simulation of A Scada System Using Sysml and SimulinkdoorsnikNessuna valutazione finora
- SE ProjectsDocumento4 pagineSE ProjectsGATLA SHOBITHNessuna valutazione finora
- Decision Making: 1.1 Decision and Decision MakersDocumento13 pagineDecision Making: 1.1 Decision and Decision MakersTiba MihaelaNessuna valutazione finora
- Yesterday, Today, and Tomorrow - 50 Years of Software EngineeringDocumento7 pagineYesterday, Today, and Tomorrow - 50 Years of Software EngineeringAntonio Arroyo PazNessuna valutazione finora