Potrebbero piacerti anche
- Chaos EngineeringDocumento72 pagineChaos EngineeringMichael100% (2)
- Advanced Functional Analysis - Ssab PDFDocumento182 pagineAdvanced Functional Analysis - Ssab PDFMichaelNessuna valutazione finora
- Business Process ManagementDocumento28 pagineBusiness Process ManagementAhmad Tariq Bhatti100% (1)
- Signals & SystemsDocumento10 pagineSignals & SystemsBindia Handa0% (1)
- Modelling and Control of Ball and Beam System Using PID ControllerDocumento6 pagineModelling and Control of Ball and Beam System Using PID ControllerTới Hồ VănNessuna valutazione finora
- Modeling and Control of Ball and Beam System Using Model Based and Non-Model Based Control ApproachesDocumento22 pagineModeling and Control of Ball and Beam System Using Model Based and Non-Model Based Control ApproachesAbolfazl_mohebbiNessuna valutazione finora
- Adaptive Backstepping Control Design For Ball andDocumento11 pagineAdaptive Backstepping Control Design For Ball andDuy KhổngNessuna valutazione finora
- F C F N A B S: Uzzy Ontrol OR Onlinearball ND EAM YstemDocumento8 pagineF C F N A B S: Uzzy Ontrol OR Onlinearball ND EAM YstemJessica RossNessuna valutazione finora
- Prototype Design and Analysis of Controllers For One Dimensional Ball and Beam SystemDocumento6 paginePrototype Design and Analysis of Controllers For One Dimensional Ball and Beam SystemSameer RajpootNessuna valutazione finora
- Copy Ball and Beam Report XDXDDocumento5 pagineCopy Ball and Beam Report XDXDEdu AguirreNessuna valutazione finora
- Two Degrees of Freedom Fractional Controller Design - Application To The Ball and Beam SystemDocumento10 pagineTwo Degrees of Freedom Fractional Controller Design - Application To The Ball and Beam SystemdiegoNessuna valutazione finora
- Modeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID Controller PDFDocumento6 pagineModeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID Controller PDFFaisal Khan JadoonNessuna valutazione finora
- Adaptive Sliding Mode Control of Ball and Plate Systems For Its Practical ApplicationDocumento5 pagineAdaptive Sliding Mode Control of Ball and Plate Systems For Its Practical Application미끄덩Nessuna valutazione finora
- Modeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerDocumento6 pagineModeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerRonald CaravacaNessuna valutazione finora
- Ball-And-Beam Laboratory System Controlled by Simulink Model Through Dedicated Microcontrolled-Matlab Data Exchange ProtocolDocumento11 pagineBall-And-Beam Laboratory System Controlled by Simulink Model Through Dedicated Microcontrolled-Matlab Data Exchange ProtocolIrawan MalikNessuna valutazione finora
- Modeling and Control of Ball and Beam SystemDocumento7 pagineModeling and Control of Ball and Beam SystemSara GomezNessuna valutazione finora
- Moasaa 08Documento6 pagineMoasaa 08Manh Nguyen TienNessuna valutazione finora
- Performance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotDocumento6 paginePerformance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotVignesh RamakrishnanNessuna valutazione finora
- Modelling of Ball and Plate System Based On First Principle Model and Optimal ControlDocumento7 pagineModelling of Ball and Plate System Based On First Principle Model and Optimal Controlhasna nadhifahNessuna valutazione finora
- Dynamics and Control of Ball and Beam SystemDocumento8 pagineDynamics and Control of Ball and Beam SystemEditor IJRITCCNessuna valutazione finora
- Rezumat Adrian DUKADocumento0 pagineRezumat Adrian DUKADina GaranNessuna valutazione finora
- Modeling and Analysis of Magnetic LevitationDocumento6 pagineModeling and Analysis of Magnetic Levitationambachew bizunehNessuna valutazione finora
- Robust Inverse Dynamics and Sliding Mode Control For Inertial Stabilization SystemsDocumento13 pagineRobust Inverse Dynamics and Sliding Mode Control For Inertial Stabilization SystemsAdriano AssisNessuna valutazione finora
- Fuzzy Logic Control For A Ball and BeamDocumento10 pagineFuzzy Logic Control For A Ball and BeamTruong NguyenNessuna valutazione finora
- Nonlinear PD Regulation For Ball and Beam SystemDocumento15 pagineNonlinear PD Regulation For Ball and Beam SystemLissete VergaraNessuna valutazione finora
- Optimal FOPI-FOPD Controller Design For Rotary Inverted Pendulum System Using Grey Wolves' Optimization TechniqueDocumento10 pagineOptimal FOPI-FOPD Controller Design For Rotary Inverted Pendulum System Using Grey Wolves' Optimization TechniqueTELKOMNIKANessuna valutazione finora
- Optimal PID Control of Magnetic Levitation System Using Genetic AlgorithmDocumento5 pagineOptimal PID Control of Magnetic Levitation System Using Genetic AlgorithmShekhar YadavNessuna valutazione finora
- Implementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicDocumento4 pagineImplementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicJessica RossNessuna valutazione finora
- Performance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemDocumento5 paginePerformance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemSanjiv CrNessuna valutazione finora
- Implementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsDocumento6 pagineImplementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsirqoviNessuna valutazione finora
- Trajectory Tracking For The Magnetic Ball Levitation System Via Exact Feedforward Linearisation and GPI ControlDocumento12 pagineTrajectory Tracking For The Magnetic Ball Levitation System Via Exact Feedforward Linearisation and GPI ControlChe ItoNessuna valutazione finora
- 6dof DynamicsDocumento13 pagine6dof DynamicsAlaa AlsotariNessuna valutazione finora
- (2012) Fuzzy Sliding-Mode Control For Ball and Beam System With Fuzzy Ant Colony OptimizationDocumento10 pagine(2012) Fuzzy Sliding-Mode Control For Ball and Beam System With Fuzzy Ant Colony OptimizationPaul AlvarezNessuna valutazione finora
- Modeling and Control of A Rotary Inverted PendulumDocumento6 pagineModeling and Control of A Rotary Inverted PendulumsalmanNessuna valutazione finora
- Robust Control of Nonholonomic Wheeled Mobile Robot With Past Information: Theory and ExperimentDocumento11 pagineRobust Control of Nonholonomic Wheeled Mobile Robot With Past Information: Theory and Experimentspandan_roy_1989Nessuna valutazione finora
- Dynamic Rotary Inverted PendulumDocumento18 pagineDynamic Rotary Inverted PendulumNguyễn SangNessuna valutazione finora
- 879mathematical Modelling of Ball On A Middle Supported Beam PDFDocumento4 pagine879mathematical Modelling of Ball On A Middle Supported Beam PDFFelipeNessuna valutazione finora
- Position Control of A Ball Balancer System Using Particle Swarm Optimization BAT and Flower Pollination AlgorithmDocumento17 paginePosition Control of A Ball Balancer System Using Particle Swarm Optimization BAT and Flower Pollination AlgorithmdangquanginhaNessuna valutazione finora
- AMechatronic Approach For Ball SCRDocumento18 pagineAMechatronic Approach For Ball SCRNavy FanasticNessuna valutazione finora
- Fractional Order PID Control of Rotor Suspension by Active Magnetic BearingsDocumento31 pagineFractional Order PID Control of Rotor Suspension by Active Magnetic BearingsNguyen Van QuyenNessuna valutazione finora
- Sliding Mode Control For Electromagnetic Levitation System Based On Feedback LinearizationDocumento5 pagineSliding Mode Control For Electromagnetic Levitation System Based On Feedback LinearizationAmit Kumar SahooNessuna valutazione finora
- Nonlinear Control Design Using Takagi-Sugeno Fuzzy Applied To Under-Actuated Visual Servo SystemDocumento15 pagineNonlinear Control Design Using Takagi-Sugeno Fuzzy Applied To Under-Actuated Visual Servo SystemdangquanginhaNessuna valutazione finora
- Inverted PendulumDocumento18 pagineInverted PendulumLingxi HuangNessuna valutazione finora
- Application of GA To Design LQR Controller For An Inverted Pendulum SystemDocumento4 pagineApplication of GA To Design LQR Controller For An Inverted Pendulum SystemAnirban GhoseNessuna valutazione finora
- PID-SMC Controller For A 2-DOF Planar Robot: February 2019Documento6 paginePID-SMC Controller For A 2-DOF Planar Robot: February 2019Khôi PhiNessuna valutazione finora
- Application of Sliding Mode Control To The Ball and Plate ProblemDocumento8 pagineApplication of Sliding Mode Control To The Ball and Plate ProblemKritika DuttaNessuna valutazione finora
- Dynamic Model-Based Adaptive Posture Controller For Robotic WheelchairsDocumento9 pagineDynamic Model-Based Adaptive Posture Controller For Robotic WheelchairsYassine RabhiNessuna valutazione finora
- Application of Intelligent Controller in A Ball and Beam Control SystemDocumento16 pagineApplication of Intelligent Controller in A Ball and Beam Control SystemjerrythaNessuna valutazione finora
- Modelling & Simulation For Optimal Control of Nonlinear Inverted Pendulum Dynamical System Using PID Controller & LQRDocumento6 pagineModelling & Simulation For Optimal Control of Nonlinear Inverted Pendulum Dynamical System Using PID Controller & LQRtamsidebd87Nessuna valutazione finora
- R. Hayat, M. BussDocumento8 pagineR. Hayat, M. BussSadiqNessuna valutazione finora
- Chang 2002Documento22 pagineChang 2002citianz2011Nessuna valutazione finora
- Classic Continuous-Time Control Methods Applied To The Ball and Beam SystemDocumento6 pagineClassic Continuous-Time Control Methods Applied To The Ball and Beam SystemdiegoNessuna valutazione finora
- 1 s2.0 S095741742301686X MainDocumento10 pagine1 s2.0 S095741742301686X Mainkurts010Nessuna valutazione finora
- Inverted 2024Documento21 pagineInverted 2024MohammedNessuna valutazione finora
- Inverted Pendulum SystemDocumento9 pagineInverted Pendulum Systemمحمد المهندسNessuna valutazione finora
- Position Control For Ball and Beam System Based On Active Disturbance Rejection ControlDocumento13 paginePosition Control For Ball and Beam System Based On Active Disturbance Rejection Controlcjm122000Nessuna valutazione finora
- Nonlinear PD Regulation For Ball and Beam System: Wen YuDocumento15 pagineNonlinear PD Regulation For Ball and Beam System: Wen YuJessica RossNessuna valutazione finora
- Preprint NNPIDDocumento12 paginePreprint NNPIDManh Nguyen TienNessuna valutazione finora
- Stiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasDocumento7 pagineStiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasIJMERNessuna valutazione finora
- TRMS State Feedback 1Documento5 pagineTRMS State Feedback 1KKWNessuna valutazione finora
- Lec - 5.2 - Robotic Model AnalysisDocumento33 pagineLec - 5.2 - Robotic Model AnalysisNiyamul Karim NiloyNessuna valutazione finora
- Revised Paper vs12Documento16 pagineRevised Paper vs12Long Trần ĐứcNessuna valutazione finora
- Design and Implementation of Ball and Beam System Using PID ControllerDocumento5 pagineDesign and Implementation of Ball and Beam System Using PID ControllerAlfredo Arias PerezNessuna valutazione finora
- Model Identification and Controller DesignDocumento6 pagineModel Identification and Controller DesignMichaelNessuna valutazione finora
- Symbiosis - Electronic Music For An Analogue and A Digital Age - HelliwellDocumento2 pagineSymbiosis - Electronic Music For An Analogue and A Digital Age - HelliwellMichaelNessuna valutazione finora
- 50 Years of EPE Part1Documento5 pagine50 Years of EPE Part1MichaelNessuna valutazione finora
- Carroll Boutall Manual 2011 PDFDocumento87 pagineCarroll Boutall Manual 2011 PDFMichaelNessuna valutazione finora
- "People Hearing Without Listening:" An Introduction To Compressive SamplingDocumento19 pagine"People Hearing Without Listening:" An Introduction To Compressive SamplingMichaelNessuna valutazione finora
- Cubic Pythagorean Hodograph Spline Curves and - Jüttler, MäurerDocumento14 pagineCubic Pythagorean Hodograph Spline Curves and - Jüttler, MäurerMichaelNessuna valutazione finora
- Gobbi and Mastinu 2001 - Analytical Description and Optimization Passively Suspended VehiclesDocumento25 pagineGobbi and Mastinu 2001 - Analytical Description and Optimization Passively Suspended VehiclesMichaelNessuna valutazione finora
- Modelling Ball-&-Beam System From Newtonian Mechanics & Lagrange Methods - Bolivar-VincentyDocumento9 pagineModelling Ball-&-Beam System From Newtonian Mechanics & Lagrange Methods - Bolivar-VincentyMichaelNessuna valutazione finora
- PI and PID Controller Tuning Rules - Overview & Personal Perspective - O'DwyerDocumento6 paginePI and PID Controller Tuning Rules - Overview & Personal Perspective - O'DwyerMichaelNessuna valutazione finora
- Compressed Sensing Simple ExplanationDocumento5 pagineCompressed Sensing Simple ExplanationMichaelNessuna valutazione finora
- La Balsa - AlsarDocumento19 pagineLa Balsa - AlsarMichaelNessuna valutazione finora
- 10 Minute Guitar Workout - Errata PDFDocumento8 pagine10 Minute Guitar Workout - Errata PDFMichaelNessuna valutazione finora
- 2 Marks - 2ND UNIT - AOR ANNA UNIVERSITY PDFDocumento3 pagine2 Marks - 2ND UNIT - AOR ANNA UNIVERSITY PDFSRMBALAANessuna valutazione finora
- Dbms Database and System ApplicationsDocumento25 pagineDbms Database and System ApplicationsKRISHNA SRIKONDANessuna valutazione finora
- Unit 4: TopicsDocumento62 pagineUnit 4: TopicsCarlos ClimacoNessuna valutazione finora
- Use Case Derived Test CasesDocumento6 pagineUse Case Derived Test Casesrajukotha8588Nessuna valutazione finora
- Building Management System: G. Pradeep, P. Chandra Shaker, SVS PrasadDocumento5 pagineBuilding Management System: G. Pradeep, P. Chandra Shaker, SVS PrasadjamesNessuna valutazione finora
- Design ConsiderationDocumento28 pagineDesign ConsiderationKarthik RamNessuna valutazione finora
- ST - Unit2Documento58 pagineST - Unit2Aditya vtNessuna valutazione finora
- Solved Examples On Thermodynamics and Gas Laws635538601134455219 PDFDocumento4 pagineSolved Examples On Thermodynamics and Gas Laws635538601134455219 PDFshubhamkhande100% (1)
- PCM Report-Network AnalysisDocumento2 paginePCM Report-Network Analysisayessa evangelistaNessuna valutazione finora
- Role of Strategy Implementation On Governance of Counties in KenyaDocumento18 pagineRole of Strategy Implementation On Governance of Counties in Kenyamariam yanalsNessuna valutazione finora
- Automation Industry PPT 2-3 ADocumento16 pagineAutomation Industry PPT 2-3 AVijay Vj100% (1)
- EE3302Documento2 pagineEE3302ashishNessuna valutazione finora
- Seminar PPT On FSM Based Vending MachineDocumento13 pagineSeminar PPT On FSM Based Vending MachinePratik PatilNessuna valutazione finora
- EPE462 - IntroductionDocumento4 pagineEPE462 - IntroductionYeoh Shen HorngNessuna valutazione finora
- Developing Prognostics Algorithms Data Based Model Based ApproachesDocumento27 pagineDeveloping Prognostics Algorithms Data Based Model Based ApproachesJocaNessuna valutazione finora
- MGS567 F15 Lec1 SystemsAnalyisDesign&ModelingDocumento25 pagineMGS567 F15 Lec1 SystemsAnalyisDesign&ModelingmanasrmohantyNessuna valutazione finora
- 5.1 QM Unit - 1 Notes-MergedDocumento108 pagine5.1 QM Unit - 1 Notes-MergedArunkumar DNessuna valutazione finora
- Malerba SectoralDocumento35 pagineMalerba SectoralCesar OsorioNessuna valutazione finora
- Software Requirements Engineering Requirements Management: Dr. Anam MustaqeemDocumento33 pagineSoftware Requirements Engineering Requirements Management: Dr. Anam Mustaqeemmuhammad abdullahNessuna valutazione finora
- Themo !Documento10 pagineThemo !alfaphysicsNessuna valutazione finora
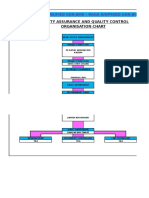
- Qaqc and Safety OrgDocumento48 pagineQaqc and Safety OrgArif DenneyNessuna valutazione finora
- Introduction To Distributed DBMS ArchitectureDocumento7 pagineIntroduction To Distributed DBMS ArchitectureSuman GhoraiNessuna valutazione finora
- Lecture-9 Time Domain Analysis of 1st Order SystemsDocumento27 pagineLecture-9 Time Domain Analysis of 1st Order Systemsusama asifNessuna valutazione finora
- Optimal Solution Using MODI - MailDocumento17 pagineOptimal Solution Using MODI - MailIshita RaiNessuna valutazione finora
- System Analysis and Design-Management Information SystemDocumento30 pagineSystem Analysis and Design-Management Information SystemnayanavenkateshNessuna valutazione finora
- Self Balancing With Pid Control PDFDocumento7 pagineSelf Balancing With Pid Control PDFMoazam AliNessuna valutazione finora
- Lab Report Sem 6Documento20 pagineLab Report Sem 6anisNessuna valutazione finora
- Summing PointDocumento22 pagineSumming Point7014KANISHKA JAISWALNessuna valutazione finora