Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Real-Time Interface Dspace DSDocumento12 pagineReal-Time Interface Dspace DShieuhuech1Nessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- 2SP0115T Control IGBT ManualDocumento21 pagine2SP0115T Control IGBT Manualhieuhuech1Nessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Advantest r6441 DMM User ManualDocumento263 pagineAdvantest r6441 DMM User Manualhieuhuech1Nessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- TDS7000 SeriesDocumento254 pagineTDS7000 Serieshieuhuech1Nessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Tektronix A6303 070390504Documento34 pagineTektronix A6303 070390504hieuhuech1Nessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Sanwa pc500Documento42 pagineSanwa pc500hieuhuech1Nessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
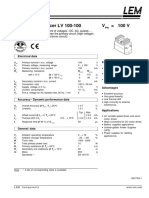
- Lem Voltage 100-500Documento2 pagineLem Voltage 100-500hieuhuech1Nessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Sensorless Foc of PMSM Chu YDocumento42 pagineSensorless Foc of PMSM Chu Yhieuhuech1Nessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Simulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining ScraperDocumento11 pagineSimulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining Scraperhieuhuech1Nessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Stator Flux and Speed - HADocumento6 pagineStator Flux and Speed - HAhieuhuech1Nessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Msp-Exp430G2 Launchpad Workshop: - Meet The Launchpad - Lab 1: Blink Launchpad LedsDocumento16 pagineMsp-Exp430G2 Launchpad Workshop: - Meet The Launchpad - Lab 1: Blink Launchpad Ledshieuhuech1Nessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Design of A Microcontroller-Based Circuit For Software ProtectionDocumento6 pagineDesign of A Microcontroller-Based Circuit For Software Protectionhieuhuech1Nessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Fod8316 108263Documento30 pagineFod8316 108263hieuhuech1Nessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Ansys Chu y Chicago Modeling and Simulation of Brushless DC Motor Drive SystemDocumento25 pagineAnsys Chu y Chicago Modeling and Simulation of Brushless DC Motor Drive Systemhieuhuech1Nessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Nonlinear Model of Permanent-Magnet Synchronous MotorsDocumento8 pagineNonlinear Model of Permanent-Magnet Synchronous Motorshieuhuech1Nessuna valutazione finora
- Speed Control Design of A PMSM Based On Functional Model Predictive ApproachDocumento15 pagineSpeed Control Design of A PMSM Based On Functional Model Predictive Approachhieuhuech1Nessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- A-ZKD-13 (ZKD-59 (A) ) : Mechanical ParameterDocumento1 paginaA-ZKD-13 (ZKD-59 (A) ) : Mechanical Parameterwissam zaatuorNessuna valutazione finora
- 801 Aeronca PDFDocumento17 pagine801 Aeronca PDFVishveshNessuna valutazione finora
- 2011 33 MaintenanceDocumento16 pagine2011 33 MaintenanceKrishna Khandige100% (1)
- Static CMOS and Dynamic CircuitsDocumento19 pagineStatic CMOS and Dynamic CircuitsAbhijna MaiyaNessuna valutazione finora
- Green Engine 2 PDFDocumento7 pagineGreen Engine 2 PDFharivardhanNessuna valutazione finora
- IPC 4552 Cuprins - ENIG PDFDocumento3 pagineIPC 4552 Cuprins - ENIG PDFMarlon CornejoNessuna valutazione finora
- Density-Based Methods: DBSCAN: Density-Based Clustering Based On Connected Regions With High DensityDocumento3 pagineDensity-Based Methods: DBSCAN: Density-Based Clustering Based On Connected Regions With High DensityKingzlynNessuna valutazione finora
- Lecture Notes Unit-1 (Network Operating System) : Session: 2021-22Documento17 pagineLecture Notes Unit-1 (Network Operating System) : Session: 2021-22Pradeep BediNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Digital Logic DesignDocumento38 pagineDigital Logic DesignAri BaderNessuna valutazione finora
- Opti Turn Tu 2004 V ManualDocumento80 pagineOpti Turn Tu 2004 V ManualCharu NavneetNessuna valutazione finora
- Chapter - 2 - Unit Hydrograph2Documento33 pagineChapter - 2 - Unit Hydrograph2Abhilekh PaudelNessuna valutazione finora
- Feasibility Study of Creating Spaces For Cultural Tourism Under The Floating Market Concept at Nong Han Lake, Sakon Nakhon, ThailandDocumento5 pagineFeasibility Study of Creating Spaces For Cultural Tourism Under The Floating Market Concept at Nong Han Lake, Sakon Nakhon, ThailandInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Institute of Metallurgy and Materials Engineering Faculty of Chemical and Materials Engineering University of The Punjab LahoreDocumento10 pagineInstitute of Metallurgy and Materials Engineering Faculty of Chemical and Materials Engineering University of The Punjab LahoreMUmairQrNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Volume 2 Part 1 - Civil & Arch SpecificationsDocumento173 pagineVolume 2 Part 1 - Civil & Arch Specificationsanish100% (1)
- My Family (Speaking Cards)Documento1 paginaMy Family (Speaking Cards)Maria Marynuch100% (1)
- The Online Math Open Fall Contest December 4-15, 2020Documento8 pagineThe Online Math Open Fall Contest December 4-15, 2020Raghav GoelNessuna valutazione finora
- High Performance Liquid Chromatography: University of Santo Tomas Faculty of Pharmacy Department of BiochemistryDocumento32 pagineHigh Performance Liquid Chromatography: University of Santo Tomas Faculty of Pharmacy Department of BiochemistryMa. Ellah Patricia M. GutierrezNessuna valutazione finora
- Weichai WP10 Euro IIIDocumento35 pagineWeichai WP10 Euro IIIBakery HamzaNessuna valutazione finora
- Bryophytes MorphologyDocumento9 pagineBryophytes Morphologyrachna singh0% (1)
- Philips Family Lamp UV CDocumento4 paginePhilips Family Lamp UV CmaterpcNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Greek LettersDocumento18 pagineThe Greek LettersSupreet GuptaNessuna valutazione finora
- Research Report 2011 Asses Water ChambalDocumento41 pagineResearch Report 2011 Asses Water Chambalsamyak sambhareNessuna valutazione finora
- Sensors & Transducers: (Code: EI 401)Documento4 pagineSensors & Transducers: (Code: EI 401)Mayukh BiswasNessuna valutazione finora
- Energy Thesis StatementDocumento6 pagineEnergy Thesis Statementnicoledixonmobile100% (2)
- Ebook PDF Conceptual Physical Science 6th Edition PDFDocumento41 pagineEbook PDF Conceptual Physical Science 6th Edition PDFamy.martin707100% (37)
- Hydrostatic, Deviatoric StressesDocumento7 pagineHydrostatic, Deviatoric StressespanbuNessuna valutazione finora
- Miltel - Case Study, Steven Age, UKDocumento2 pagineMiltel - Case Study, Steven Age, UKAnit SahuNessuna valutazione finora
- HandbikeDocumento10 pagineHandbikeLely JuniariNessuna valutazione finora
- Sugar Factory InsulationDocumento29 pagineSugar Factory InsulationZerihun Negash100% (1)
- Servo Controlled FBW With Power Boost Control, Operations & Maint. ManualDocumento126 pagineServo Controlled FBW With Power Boost Control, Operations & Maint. ManualKota NatarajanNessuna valutazione finora
- Summary of Noah Kagan's Million Dollar WeekendDa EverandSummary of Noah Kagan's Million Dollar WeekendValutazione: 5 su 5 stelle5/5 (2)
- $100M Leads: How to Get Strangers to Want to Buy Your StuffDa Everand$100M Leads: How to Get Strangers to Want to Buy Your StuffValutazione: 5 su 5 stelle5/5 (19)