Potrebbero piacerti anche
- 125 - 208 Homework 4 SolutionsDocumento18 pagine125 - 208 Homework 4 SolutionsdfgdfgdfgaaNessuna valutazione finora
- Laboratory Manual For Human Anatomy and Physiology Main Version 4th Edition Martin Test BankDocumento11 pagineLaboratory Manual For Human Anatomy and Physiology Main Version 4th Edition Martin Test BankDeborahMartincsfrb100% (16)
- MT13 Clinical Anatomy and Physiology For Med Lab Science Laboratory Worksheet - SU - ICLSDocumento8 pagineMT13 Clinical Anatomy and Physiology For Med Lab Science Laboratory Worksheet - SU - ICLSGOOKIEBOONessuna valutazione finora
- Chapter 2 Activities & AssessmentDocumento3 pagineChapter 2 Activities & Assessmentcareng FaustinoNessuna valutazione finora
- Human Anatomy PaperDocumento3 pagineHuman Anatomy PaperFaisal AwanNessuna valutazione finora
- Anatomical Scavenger HuntDocumento11 pagineAnatomical Scavenger HuntElle B.Nessuna valutazione finora
- Anatomy & Physiology WorksheetDocumento2 pagineAnatomy & Physiology WorksheetMalyn DilagNessuna valutazione finora
- Muscles QuestionsDocumento3 pagineMuscles QuestionsIRADUKUNDA Marie SolangeNessuna valutazione finora
- Section 2 QuizDocumento2 pagineSection 2 QuizpoNessuna valutazione finora
- Importance of Anatomical KnowledgeDocumento3 pagineImportance of Anatomical Knowledgeviolet vinsmokeNessuna valutazione finora
- Ebook Clinical Kinesiology and Anatomy 6Th Edition Lippert Test Bank Full Chapter PDFDocumento25 pagineEbook Clinical Kinesiology and Anatomy 6Th Edition Lippert Test Bank Full Chapter PDFJeffreyLawsonmkbof100% (11)
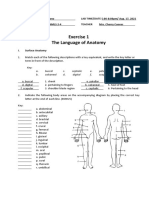
- Exercise 1 Language of AnatomyDocumento4 pagineExercise 1 Language of Anatomymaniz44285% (27)
- Week1 PracticeDocumento3 pagineWeek1 PracticeMarcus CarusoNessuna valutazione finora
- ACTIVITY 1 Human Anatomy and Physiology and PathophysiologyDocumento23 pagineACTIVITY 1 Human Anatomy and Physiology and PathophysiologyShaila Joy Campano100% (1)
- Upper and Lower Limb Anatomy QuestionsDocumento8 pagineUpper and Lower Limb Anatomy QuestionsAnon AnonNessuna valutazione finora
- Anatomy: 1800 Multiple Choice QuestionsDa EverandAnatomy: 1800 Multiple Choice QuestionsValutazione: 3.5 su 5 stelle3.5/5 (15)
- Anatomy of the Shoulder Region-- Hussein 2028Documento49 pagineAnatomy of the Shoulder Region-- Hussein 2028hcnk yvsnkNessuna valutazione finora
- Human Muscle Identification GuideDocumento5 pagineHuman Muscle Identification GuidegalaxyduckNessuna valutazione finora
- Produces Heat and MovementDocumento15 pagineProduces Heat and MovementKeesha Mae Urgelles TimogNessuna valutazione finora
- ANTY 1401 - Week 1 - : AnswersDocumento3 pagineANTY 1401 - Week 1 - : AnswersCarina LattoNessuna valutazione finora
- Section 4 Quiz: Lower Extremity AnatomyDocumento2 pagineSection 4 Quiz: Lower Extremity AnatomypoNessuna valutazione finora
- Anatomical Terminology WorksheetDocumento5 pagineAnatomical Terminology WorksheetIzzy Dale Cagas SilangaNessuna valutazione finora
- Anatomical Scavenger HuntDocumento12 pagineAnatomical Scavenger HuntRhian VitalisNessuna valutazione finora
- ManualDocumento7 pagineManualsocimedia300Nessuna valutazione finora
- Section 3 Quiz: Multiple ChoiceDocumento2 pagineSection 3 Quiz: Multiple ChoicepoNessuna valutazione finora
- Human Movement Module 1Documento10 pagineHuman Movement Module 1Paula Dimples SantiagoNessuna valutazione finora
- Brunnstroms Clinical Kinesiology 6Th Edition Houglum Test Bank Full Chapter PDFDocumento29 pagineBrunnstroms Clinical Kinesiology 6Th Edition Houglum Test Bank Full Chapter PDFtristfulringbirdzpw100% (14)
- Anatomy and Physiology Chapter QuestionsDocumento50 pagineAnatomy and Physiology Chapter QuestionsEntertainment StatusNessuna valutazione finora
- Mcqs Final For Prints 0Documento138 pagineMcqs Final For Prints 0Tanzeela IftikharNessuna valutazione finora
- Prelab 4 Appendicular Skeleton and Joints Winter 2020Documento4 paginePrelab 4 Appendicular Skeleton and Joints Winter 2020Mareline MendietaNessuna valutazione finora
- 1016MSC T1 2023 Module 2 Muscular System Tutorial Worksheets-1Documento17 pagine1016MSC T1 2023 Module 2 Muscular System Tutorial Worksheets-1Tina HussainiNessuna valutazione finora
- Organization of The Body: Lab Report 8Documento5 pagineOrganization of The Body: Lab Report 8larry machonNessuna valutazione finora
- 1 - Anatomical Terminology KEYDocumento6 pagine1 - Anatomical Terminology KEY愛.NiniNessuna valutazione finora
- Lower and Upper LimbDocumento37 pagineLower and Upper LimbVy ThachNessuna valutazione finora
- Anatomy MCQS Part 4 PDFDocumento20 pagineAnatomy MCQS Part 4 PDFSamer Qusay100% (1)
- Homework Orthopedi G1a220011Documento10 pagineHomework Orthopedi G1a220011Liana Ika SuwandyNessuna valutazione finora
- Question Slipped DiscDocumento2 pagineQuestion Slipped DiscMuthu RamanNessuna valutazione finora
- Basic Biomechanics 6Th Edition Hall Test Bank Full Chapter PDFDocumento45 pagineBasic Biomechanics 6Th Edition Hall Test Bank Full Chapter PDFtrancuongvaxx8r100% (12)
- Anatomy and Physiology Lab Manual ReviewDocumento4 pagineAnatomy and Physiology Lab Manual ReviewJustine CarpioNessuna valutazione finora
- LIMCHIU, KYLE B. ANAPHY 101 Unit V Module 2Documento4 pagineLIMCHIU, KYLE B. ANAPHY 101 Unit V Module 2Kyle LimchiuNessuna valutazione finora
- The Muscular System: ObjectivesDocumento2 pagineThe Muscular System: ObjectivesChatterley OlanoNessuna valutazione finora
- Upper LimbDocumento51 pagineUpper LimbVy ThachNessuna valutazione finora
- Body Terminology Wks Answer KeyDocumento4 pagineBody Terminology Wks Answer KeyMaria Theresa FortunaNessuna valutazione finora
- Test Bank For Brunnstroms Clinical Kinesiology 6th Edition HouglumDocumento9 pagineTest Bank For Brunnstroms Clinical Kinesiology 6th Edition Houglumamandawrightrwfdcombka100% (34)
- Le Ga 1Documento15 pagineLe Ga 1Carlos NiñoNessuna valutazione finora
- NEET PG 2015 Question Paper With SolutionsDocumento1.852 pagineNEET PG 2015 Question Paper With SolutionsmedpoxNessuna valutazione finora
- New MCQS AnatomyDocumento50 pagineNew MCQS AnatomyEntertainment StatusNessuna valutazione finora
- Test Bank For Clinical Kinesiology and Anatomy 5th Edition by LippertDocumento2 pagineTest Bank For Clinical Kinesiology and Anatomy 5th Edition by LippertpoNessuna valutazione finora
- Review Test: Directions: One-BestDocumento8 pagineReview Test: Directions: One-BestFrederieNessuna valutazione finora
- Apk 1997Documento9 pagineApk 1997Pau CMedinaNessuna valutazione finora
- Sudan Medical Specialization Board 2Documento37 pagineSudan Medical Specialization Board 2Dania Zaid100% (1)
- Human Anatomy Physiology 11Th Edition Marieb Test Bank Full Chapter PDFDocumento36 pagineHuman Anatomy Physiology 11Th Edition Marieb Test Bank Full Chapter PDFninhdermotc1u100% (9)
- Human Anatomy Physiology 11th Edition Marieb Test BankDocumento15 pagineHuman Anatomy Physiology 11th Edition Marieb Test Banklaeliacaixpoyf100% (32)
- BI 275 Exam IIDocumento8 pagineBI 275 Exam IIAlexandra Lauren EzellNessuna valutazione finora
- Anatomy & Physiology Mcqs Solved-1Documento42 pagineAnatomy & Physiology Mcqs Solved-1Sana Rasheed100% (1)
- General Sciences Q a From WellsDocumento1.921 pagineGeneral Sciences Q a From Wellscanaduh2023Nessuna valutazione finora
- Schucmann Retest ADocumento10 pagineSchucmann Retest Asheila roma sibugNessuna valutazione finora
- Anatomy Chapter 2 Test Answer KeyDocumento4 pagineAnatomy Chapter 2 Test Answer KeyOlalekan Oyekunle100% (1)
- Gross Anatomy Preliminary Exams SamplexDocumento12 pagineGross Anatomy Preliminary Exams SamplexCarlos NiñoNessuna valutazione finora
- Vision CA 2018 08 PDFDocumento87 pagineVision CA 2018 08 PDFlakkappaNessuna valutazione finora
- Insights Test 7Documento12 pagineInsights Test 7HarishNessuna valutazione finora
- Fall 2013 Exam SolutionDocumento6 pagineFall 2013 Exam SolutionHarishNessuna valutazione finora
- EKT Mech 15 KeysDocumento6 pagineEKT Mech 15 KeysHarishNessuna valutazione finora
- 125 208 Homework 4 Solutions PDFDocumento18 pagine125 208 Homework 4 Solutions PDFHarishNessuna valutazione finora
- Euler Turbine (Energy) EquationDocumento3 pagineEuler Turbine (Energy) EquationHarishNessuna valutazione finora
- A Kinetic Chain Approach For Shoulder Rehab MCMULLEN PDFDocumento9 pagineA Kinetic Chain Approach For Shoulder Rehab MCMULLEN PDFgermany23Nessuna valutazione finora
- Bones and Joints of the Shoulder: Anatomy and Common InjuriesDocumento4 pagineBones and Joints of the Shoulder: Anatomy and Common InjuriesVanessa Yvonne GurtizaNessuna valutazione finora
- Comparison of High-Grade and Low-Grade Mobilization Techniques in The Management of Adhesive Capsulitis of The Shoulder: Randomized Controlled TrialDocumento14 pagineComparison of High-Grade and Low-Grade Mobilization Techniques in The Management of Adhesive Capsulitis of The Shoulder: Randomized Controlled TrialLakshmi PrasannaNessuna valutazione finora
- Physical Examination of The Shoulder FinalDocumento28 paginePhysical Examination of The Shoulder FinalAndinNessuna valutazione finora
- The Human Muscles: Lectured by Bien Eli Nillos, MD Reference: Gray's AnatomyDocumento158 pagineThe Human Muscles: Lectured by Bien Eli Nillos, MD Reference: Gray's Anatomybayenn100% (1)
- Regional Anesthesia For Scapular Fracture Surgery: An Educational Review of Anatomy and TechniquesDocumento6 pagineRegional Anesthesia For Scapular Fracture Surgery: An Educational Review of Anatomy and TechniquesSean SmythNessuna valutazione finora
- Ryan J. Warth, Peter J. Millett Auth. Physical Examination of The Shoulder An Evidence-Based ApproachDocumento280 pagineRyan J. Warth, Peter J. Millett Auth. Physical Examination of The Shoulder An Evidence-Based ApproachAndrei R Lupu100% (1)
- 2 2012 Attachment of The Anteroinferior Glenohumeral Ligament Labrum Complex To The Glenoid An Anatomic Study 305229222Documento6 pagine2 2012 Attachment of The Anteroinferior Glenohumeral Ligament Labrum Complex To The Glenoid An Anatomic Study 305229222César ArveláezNessuna valutazione finora
- Subacromial BursitisDocumento28 pagineSubacromial BursitisRonak PatelNessuna valutazione finora
- Shoulder Dislocation Physiotherapy StagesDocumento13 pagineShoulder Dislocation Physiotherapy StagesSahoo PRASANTANessuna valutazione finora
- Gian Luigi Canata, Henrique Jones - Epidemiology of Injuries in Sports-Springer (2022)Documento157 pagineGian Luigi Canata, Henrique Jones - Epidemiology of Injuries in Sports-Springer (2022)Renan Sequini Favaro100% (1)
- Shoulder InjuryDocumento79 pagineShoulder InjurySudipta BhowmickNessuna valutazione finora
- 06 - Sullivan - A ReviewerDocumento56 pagine06 - Sullivan - A ReviewerCatrina Tan100% (2)
- ARTHRYS Training EN - GânDocumento9 pagineARTHRYS Training EN - GânLâm Đặng ĐứcNessuna valutazione finora
- Skeletal System PDFDocumento24 pagineSkeletal System PDFJennifer LalondeNessuna valutazione finora
- Therapeutic Exercise For Athletes Neck PainDocumento9 pagineTherapeutic Exercise For Athletes Neck PainMasajes A DomicilioNessuna valutazione finora
- Ortho Notes by Joachim & Liyana - Edited by Waiwai (FINAL) - Pdf-Notes - 201409021158Documento142 pagineOrtho Notes by Joachim & Liyana - Edited by Waiwai (FINAL) - Pdf-Notes - 201409021158Yiu Jean LNessuna valutazione finora
- Shoulder Conditions & It's Physiotherapy TreatmentDocumento41 pagineShoulder Conditions & It's Physiotherapy Treatmentramkumar_sihagNessuna valutazione finora
- 2641 UK MSK Ultrasound Shoulder Quick Guide v1Documento63 pagine2641 UK MSK Ultrasound Shoulder Quick Guide v1Fisioterapi Bhakti Rahayu100% (1)
- Ellen Becker 2014Documento5 pagineEllen Becker 2014Nacho Cifuentes BlancNessuna valutazione finora
- The Disabled Throwing Shoulder Spectrum of Pathology Part II Evaluation and Treatment of SLAP Lesions in Throwers PDFDocumento9 pagineThe Disabled Throwing Shoulder Spectrum of Pathology Part II Evaluation and Treatment of SLAP Lesions in Throwers PDFWallison LeaoNessuna valutazione finora
- Neck Axilla BackDocumento24 pagineNeck Axilla BackmoregutsNessuna valutazione finora
- MOINA Flashcards (Upper Limb)Documento63 pagineMOINA Flashcards (Upper Limb)jnthnrsj50% (2)
- Clinical Data Fisiotek HP2Documento28 pagineClinical Data Fisiotek HP2Alexandra NadinneNessuna valutazione finora
- Color Atlas of Surgical Approaches To The Bones and Joints of The Dog and Cat, Thoracic and Pelvic Limbs (VetBooks - Ir)Documento245 pagineColor Atlas of Surgical Approaches To The Bones and Joints of The Dog and Cat, Thoracic and Pelvic Limbs (VetBooks - Ir)Ömer KavasNessuna valutazione finora
- VenkateshDocumento94 pagineVenkateshpriya selvarajNessuna valutazione finora
- Anatomy PDFDocumento76 pagineAnatomy PDFPredrag RacicNessuna valutazione finora
- Kibler Et Al 2012 Scapula Dyskinesis and Its Relation To Shoulder Injury PDFDocumento9 pagineKibler Et Al 2012 Scapula Dyskinesis and Its Relation To Shoulder Injury PDFPamela DíazNessuna valutazione finora
- August 1996Documento11 pagineAugust 1996Kennie RamirezNessuna valutazione finora