Potrebbero piacerti anche
- Robo Sumo 1kg (Reviewed With FP)Documento8 pagineRobo Sumo 1kg (Reviewed With FP)manusiagreget33Nessuna valutazione finora
- Group 24 Coursework Assignment Final ReportDocumento23 pagineGroup 24 Coursework Assignment Final Reportmohammed almamariNessuna valutazione finora
- Rules - Paintball Robot University 2014Documento16 pagineRules - Paintball Robot University 2014MFaiz RHamiraNessuna valutazione finora
- SeniorDesign2Report Group29Documento145 pagineSeniorDesign2Report Group29Ishali SandbhorNessuna valutazione finora
- 2024 ReadyToRaceV6Documento18 pagine2024 ReadyToRaceV6ehtesham.haiderNessuna valutazione finora
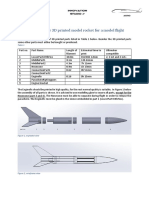
- This Is A Manual For 3D Printed Model Rocket For A Model Flight CompetitionDocumento5 pagineThis Is A Manual For 3D Printed Model Rocket For A Model Flight CompetitionDiego BonillaNessuna valutazione finora
- Design ChallangeDocumento8 pagineDesign ChallangeZahid NawazNessuna valutazione finora
- MP MC CepDocumento10 pagineMP MC Cep210276Nessuna valutazione finora
- Urc PDFDocumento5 pagineUrc PDFDanielSonnyKaruniaNessuna valutazione finora
- Project: Task: Construct A Robot That Can Decrease in Size To Fit Through A Tunnel, Widen To Go Over ADocumento7 pagineProject: Task: Construct A Robot That Can Decrease in Size To Fit Through A Tunnel, Widen To Go Over ASarah SwansonNessuna valutazione finora
- RuleBook ABU ROBOCON 2015Documento22 pagineRuleBook ABU ROBOCON 2015FRIGHThouseNessuna valutazione finora
- Rulebook-Partner Robot ChallengeDocumento21 pagineRulebook-Partner Robot ChallengeXedric AlvarezNessuna valutazione finora
- Cooperative Control of Multi-Agent Systems: Theory and ApplicationsDa EverandCooperative Control of Multi-Agent Systems: Theory and ApplicationsNessuna valutazione finora
- Mathworks Minidrone Competition GuidelinesDocumento8 pagineMathworks Minidrone Competition GuidelinesE R PRAVEENNessuna valutazione finora
- MSD Project Report 170648, 170549, 179597Documento19 pagineMSD Project Report 170648, 170549, 179597Saif ur rehmanNessuna valutazione finora
- SumoBots Rules 2020Documento5 pagineSumoBots Rules 2020QuandaleNessuna valutazione finora
- 4D Ship Simulator User Guide Rev1.0 (20130225)Documento51 pagine4D Ship Simulator User Guide Rev1.0 (20130225)hacker0206Nessuna valutazione finora
- PackMan ProblemStatementDocumento9 paginePackMan ProblemStatementAditi BhogeNessuna valutazione finora
- Design of Arena Robot Based On STM32 ControlDocumento8 pagineDesign of Arena Robot Based On STM32 Controltranluongminhgianga1Nessuna valutazione finora
- Robot Gathering 2023Documento10 pagineRobot Gathering 2023S SNessuna valutazione finora
- Technical Summary 2019Documento18 pagineTechnical Summary 2019Team 5401Nessuna valutazione finora
- Internet Das Coisas para Veículos CompartilhadosDocumento141 pagineInternet Das Coisas para Veículos CompartilhadosL de Libertário IINessuna valutazione finora
- Manual de Mantenimiento y Codigos de FallaDocumento123 pagineManual de Mantenimiento y Codigos de FallaHamiltonNessuna valutazione finora
- Robot Project DocumentationDocumento102 pagineRobot Project DocumentationLenny LemorNessuna valutazione finora
- Myrt - RulebookDocumento24 pagineMyrt - RulebookMainak DasguptaNessuna valutazione finora
- OpenGL Deep Dive: Expert Techniques and Performance Optimization: OpenGLDa EverandOpenGL Deep Dive: Expert Techniques and Performance Optimization: OpenGLNessuna valutazione finora
- Theme and Rules ABU Robocon 2015Documento22 pagineTheme and Rules ABU Robocon 2015Arpita PatelNessuna valutazione finora
- 20AE60R05 Nitin Sharma MTP-ReportDocumento34 pagine20AE60R05 Nitin Sharma MTP-ReportsayanNessuna valutazione finora
- JRF 2022 V1.1Documento15 pagineJRF 2022 V1.1Agung SetiyawanNessuna valutazione finora
- Draft EProcon 2013 RuleDocumento3 pagineDraft EProcon 2013 RuleOdd Quang KhoiNessuna valutazione finora
- General Guide For Accurate Weighing With Portable Wheel Load ScalesDocumento11 pagineGeneral Guide For Accurate Weighing With Portable Wheel Load ScalesDe SernNessuna valutazione finora
- 2012 NRC General RulesDocumento10 pagine2012 NRC General RulessayangkukNessuna valutazione finora
- SENG 466: Autonomous and Remote Control HovercraftDocumento49 pagineSENG 466: Autonomous and Remote Control HovercraftLazyo RahmandoNessuna valutazione finora
- WRO College Category Rules 2014 - Mars Colony - OfficialDocumento8 pagineWRO College Category Rules 2014 - Mars Colony - OfficialChristopher ClarkNessuna valutazione finora
- Example ReportDocumento14 pagineExample ReportPankaj PatelNessuna valutazione finora
- Development of An Autoland System For General Aviation Aircraft - Thesis 2012Documento208 pagineDevelopment of An Autoland System For General Aviation Aircraft - Thesis 2012Sam RubinNessuna valutazione finora
- MotorredutorDocumento60 pagineMotorredutorPedro Garcia M. JúniorNessuna valutazione finora
- Nesis User ManualDocumento132 pagineNesis User ManualFaras AlsaidNessuna valutazione finora
- Game Development QT 3 DDocumento59 pagineGame Development QT 3 DMohammad Mohsen AmiriNessuna valutazione finora
- Window Cleaning Robot: ASME Design CompetitionDocumento38 pagineWindow Cleaning Robot: ASME Design CompetitionNivedhan GandhiNessuna valutazione finora
- Accelerometer Based Hand Gesture Controlled Robot Using ArduinoDocumento42 pagineAccelerometer Based Hand Gesture Controlled Robot Using ArduinoJuthik BVNessuna valutazione finora
- Hexacopter With Gripping Module: Mechatronic Engineering, 180 CreditsDocumento56 pagineHexacopter With Gripping Module: Mechatronic Engineering, 180 CreditsPhạm PhátNessuna valutazione finora
- Building A Dynometer TestDocumento57 pagineBuilding A Dynometer TestahmadNessuna valutazione finora
- RobowarsDocumento7 pagineRobowarsapi-249672841Nessuna valutazione finora
- ICUAS 2022 UAV Competition Rulebook - v1.0Documento9 pagineICUAS 2022 UAV Competition Rulebook - v1.0AdilFarooqNessuna valutazione finora
- GimbalDocumento55 pagineGimbalMark100% (1)
- PackMan ProblemStatement PDFDocumento10 paginePackMan ProblemStatement PDFMervin RodrigoNessuna valutazione finora
- ABU Robocon Theme and Rules 24 August 2014Documento22 pagineABU Robocon Theme and Rules 24 August 2014Saripudin GonNessuna valutazione finora
- Cargo Delivery System With Drone: Gazi University Engineering Faculty Electrical-Electronics Engineering DepartmentDocumento51 pagineCargo Delivery System With Drone: Gazi University Engineering Faculty Electrical-Electronics Engineering DepartmentGöktuğ AlbayrakNessuna valutazione finora
- GSM - Architecture, Protocols and ServicesDa EverandGSM - Architecture, Protocols and ServicesValutazione: 1 su 5 stelle1/5 (1)
- Autobots: A Battle For SurvivalDocumento6 pagineAutobots: A Battle For Survivalbon2lead208Nessuna valutazione finora
- 2010 Competition RulesDocumento3 pagine2010 Competition RulesshravantataNessuna valutazione finora
- Repot 5r4Documento23 pagineRepot 5r4Md Mahfuz AhmedNessuna valutazione finora
- 07 Quadcopter Final ReportDocumento22 pagine07 Quadcopter Final ReportKULDEEP KUMARNessuna valutazione finora
- ARMS ROBOTS RobotarmprojectDocumento59 pagineARMS ROBOTS RobotarmprojectNdiayeNessuna valutazione finora
- RC Plane So Vertikalno PoletuvanjeDocumento164 pagineRC Plane So Vertikalno PoletuvanjeBlashko Gjorgjiev100% (1)
- EmpgDocumento10 pagineEmpgShravanNessuna valutazione finora
- User ManualDocumento13 pagineUser ManualAnurag AnandNessuna valutazione finora
- Self Parking RobotDocumento49 pagineSelf Parking RobotAndrei OlaruNessuna valutazione finora
- BxieDocumento49 pagineBxietrí nguyễnNessuna valutazione finora
- BatteryGuide Megger PDFDocumento32 pagineBatteryGuide Megger PDFRusen GeorgeNessuna valutazione finora
- Energia Potentiala OsmoticaDocumento10 pagineEnergia Potentiala OsmoticaRusen GeorgeNessuna valutazione finora
- 1.my Protein Take 63kg 138.89lbs 166.6g - 208.335g Per DayDocumento3 pagine1.my Protein Take 63kg 138.89lbs 166.6g - 208.335g Per DayRusen GeorgeNessuna valutazione finora
- Cahier LousticsDocumento4 pagineCahier LousticsRusen George50% (4)
- CoursesDocumento91 pagineCoursesIskh GowthamNessuna valutazione finora
- Luyen Thi TS 10Documento3 pagineLuyen Thi TS 10Đỗ Nguyện Vọng MộtNessuna valutazione finora
- CC Unit 1Documento81 pagineCC Unit 1Subbulakshmi IT - AP INessuna valutazione finora
- 985725Documento21 pagine985725Hari XcelNessuna valutazione finora
- CH01 IntroductionDocumento17 pagineCH01 IntroductionLim Soong XIanNessuna valutazione finora
- ICACT 2020 Flyer PDFDocumento1 paginaICACT 2020 Flyer PDFsivapostNessuna valutazione finora
- Chapter 1 - PLC OverviewDocumento52 pagineChapter 1 - PLC OverviewApoorva Kulkarni67% (3)
- A Brief History of The ComputerDocumento5 pagineA Brief History of The ComputerRuth AsterNessuna valutazione finora
- Seminar On Wearable ComputingDocumento19 pagineSeminar On Wearable ComputingAstha RawatNessuna valutazione finora
- NetInstall DescriptionDocumento9 pagineNetInstall Descriptionoiturre6414Nessuna valutazione finora
- 1 Technical Specification For ERSDocumento16 pagine1 Technical Specification For ERSipraoNessuna valutazione finora
- Operating System: Time: 3 HRS.) (Marks: 100Documento17 pagineOperating System: Time: 3 HRS.) (Marks: 100Aditya Darekar100% (1)
- Seminar On Input and Output DevicesDocumento16 pagineSeminar On Input and Output Devicesabolarinoladele50% (2)
- 2014 Smart Card cloner User's Manual V3.0: 1、Equipment introductionDocumento2 pagine2014 Smart Card cloner User's Manual V3.0: 1、Equipment introductionFeepobNessuna valutazione finora
- Flexible Manufacturing Systems (FMS) : A Review: Manu. G, Vijay Kumar. M, Nagesh. H, Jagadeesh. D & Gowtham. M. BDocumento14 pagineFlexible Manufacturing Systems (FMS) : A Review: Manu. G, Vijay Kumar. M, Nagesh. H, Jagadeesh. D & Gowtham. M. BTJPRC PublicationsNessuna valutazione finora
- Dell Latitutde d531Documento162 pagineDell Latitutde d531Stre HncNessuna valutazione finora
- Swiss Timing - C++ DeveloperDocumento2 pagineSwiss Timing - C++ Developermamatovmurat0Nessuna valutazione finora
- The Matter-Being Project - Wing Pon MATTER-BEING PARADIGM - A SUMMARYDocumento1 paginaThe Matter-Being Project - Wing Pon MATTER-BEING PARADIGM - A SUMMARYStephen J. RobertsNessuna valutazione finora
- midterm-examination-2nd-Sem-Marfe Jan MontelibanoDocumento6 paginemidterm-examination-2nd-Sem-Marfe Jan MontelibanoMarfe MontelibanoNessuna valutazione finora
- Introduction For Assembly and Disassembly of PCDocumento2 pagineIntroduction For Assembly and Disassembly of PCKrish Martinez100% (5)
- The Five Generations of Computers: AssignmentDocumento10 pagineThe Five Generations of Computers: Assignmentjismon_kjNessuna valutazione finora
- Computer Science PaperDocumento16 pagineComputer Science PaperFaraz AhmedNessuna valutazione finora
- What Is DevopsDocumento3 pagineWhat Is DevopsvijaysudhakarNessuna valutazione finora
- Computer: Man Is Still The Most Extraordinary Computer of All John F - KennedyDocumento289 pagineComputer: Man Is Still The Most Extraordinary Computer of All John F - KennedyatherNessuna valutazione finora
- OMRON PLC-Based Process Control Engineering GuideDocumento228 pagineOMRON PLC-Based Process Control Engineering GuideMichael Parohinog GregasNessuna valutazione finora
- FAIRDocumento33 pagineFAIRashikNessuna valutazione finora
- Gas Agency Management SystemDocumento14 pagineGas Agency Management SystemheartbrokenmjNessuna valutazione finora
- Information Technology in Marketing or Marketing Information System (MkIS)Documento25 pagineInformation Technology in Marketing or Marketing Information System (MkIS)Shamimhstu100% (2)
- Front Office Services (Grade 8)Documento15 pagineFront Office Services (Grade 8)Anabel Baynosa100% (7)
- CH01 COA9eDocumento16 pagineCH01 COA9eimagayoNessuna valutazione finora