Potrebbero piacerti anche
- Vibration Isolators FinalDocumento54 pagineVibration Isolators Finalفرح تامرNessuna valutazione finora
- Duisburg Test Case: Post-Panamax Container Ship For BenchmarkingDocumento15 pagineDuisburg Test Case: Post-Panamax Container Ship For BenchmarkingChahbi RamziNessuna valutazione finora
- First Order SystemsDocumento158 pagineFirst Order SystemsGathy BrayohNessuna valutazione finora
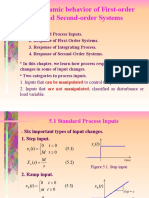
- Chapter 5 - Dynamic Behavior of First-Order and Second-Order ProcessesDocumento44 pagineChapter 5 - Dynamic Behavior of First-Order and Second-Order ProcessesFakhrulShahrilEzanieNessuna valutazione finora
- The Transfer FunctionDocumento16 pagineThe Transfer FunctionSyuhadah NoordinNessuna valutazione finora
- Damping Mass in Mountain Bike SuspensionDocumento27 pagineDamping Mass in Mountain Bike SuspensionAnonymous rFxZ3JUUi100% (3)
- Mech LND 17.0 M02 DampingDocumento25 pagineMech LND 17.0 M02 DampingKubilayNessuna valutazione finora
- Pyjamas Are ForgivingDocumento2 paginePyjamas Are ForgivingHahaha14% (7)
- Time Response, ME451: Instructor: Jongeun ChoiDocumento84 pagineTime Response, ME451: Instructor: Jongeun ChoiJpradha KamalNessuna valutazione finora
- Ist and 2nd Order ResponseDocumento22 pagineIst and 2nd Order ResponseDeep SinojiyaNessuna valutazione finora
- Time RespDocumento13 pagineTime RespAvi SharanNessuna valutazione finora
- Linear Control Systems (EE-3052) : Lecture-11 Steady State ErrorDocumento24 pagineLinear Control Systems (EE-3052) : Lecture-11 Steady State Errorusama asifNessuna valutazione finora
- Chapter 6 - Time ResponseDocumento88 pagineChapter 6 - Time Responsevenosyah devanNessuna valutazione finora
- CONTROL SYSTEM Reprot 002Documento10 pagineCONTROL SYSTEM Reprot 002HybaibNessuna valutazione finora
- ME451: Control Systems Course RoadmapDocumento5 pagineME451: Control Systems Course RoadmapVu NghiaNessuna valutazione finora
- Lec02 Math Foundation1Documento5 pagineLec02 Math Foundation1Josena SSNessuna valutazione finora
- Ec Formula Notes 11Documento369 pagineEc Formula Notes 11Tharun kondaNessuna valutazione finora
- Chapter 6 - Time - Response - 2020 PDFDocumento88 pagineChapter 6 - Time - Response - 2020 PDFtiraNessuna valutazione finora
- Time Domain Analysis of Control SystemDocumento25 pagineTime Domain Analysis of Control SystemEti'el Films / ኢትኤል ፊልሞችNessuna valutazione finora
- Time ResponseDocumento84 pagineTime ResponseDhyan PatelNessuna valutazione finora
- Time Response Time Response: (Textbook Ch.4)Documento44 pagineTime Response Time Response: (Textbook Ch.4)Burak AltıparmakNessuna valutazione finora
- Control Engineering2 - CDocumento44 pagineControl Engineering2 - CMihaelaNessuna valutazione finora
- Week 5Documento48 pagineWeek 5Raising StarNessuna valutazione finora
- G S D(S) N S D S N S D S: EC5: Control SystemsDocumento7 pagineG S D(S) N S D S N S D S: EC5: Control SystemsMANOJ KUMAR DASNessuna valutazione finora
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Documento91 pagineChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nNessuna valutazione finora
- Chapter 3: Dynamic ResponseDocumento41 pagineChapter 3: Dynamic ResponseAhmedSalahNessuna valutazione finora
- Time Response Analysis - First Order SystemDocumento32 pagineTime Response Analysis - First Order Systemearnest normanNessuna valutazione finora
- Transient and Steady-State Re-Sponse Analyses: Unit-Step Response of First-Order SystemsDocumento12 pagineTransient and Steady-State Re-Sponse Analyses: Unit-Step Response of First-Order SystemsAhmed SaidNessuna valutazione finora
- Lecture-9 Time Domain Analysis of 1st Order SystemsDocumento27 pagineLecture-9 Time Domain Analysis of 1st Order Systemsusama asifNessuna valutazione finora
- Addis Ababa Science & Technology University: College of Electrical & Mechanical EngineeringDocumento91 pagineAddis Ababa Science & Technology University: College of Electrical & Mechanical Engineeringliyou eshetuNessuna valutazione finora
- Presentation 4Documento57 paginePresentation 4Aphichaya thanchaiNessuna valutazione finora
- EEE 4706 Lab 3Documento7 pagineEEE 4706 Lab 3Rummanur RahadNessuna valutazione finora
- Week 2Documento90 pagineWeek 2Raising StarNessuna valutazione finora
- KIG 4001 Control Engineering (Group 4) : Time Response AnalysisDocumento29 pagineKIG 4001 Control Engineering (Group 4) : Time Response AnalysisNurul Iman Nur ElahiNessuna valutazione finora
- Control System Fundamental: Time Response AnalysisDocumento77 pagineControl System Fundamental: Time Response Analysisoneisa92100% (1)
- Chapter5 130401031918 Phpapp01 PDFDocumento34 pagineChapter5 130401031918 Phpapp01 PDFSiraj MohammedNessuna valutazione finora
- First Order SystemDocumento5 pagineFirst Order SystemNazmul islamNessuna valutazione finora
- Stability Analysis in DTCS: DR V S Krushnasamy Associate ProfessorDocumento58 pagineStability Analysis in DTCS: DR V S Krushnasamy Associate Professorkrushnasamy subramaniyanNessuna valutazione finora
- Time Domain Analysis of Control SystemDocumento49 pagineTime Domain Analysis of Control Systemanasmos danielNessuna valutazione finora
- Online Control Lecture #2Documento33 pagineOnline Control Lecture #2Noor GamingNessuna valutazione finora
- Lsim Simulates The (Time) Response of Continuous or Discrete Linear Systems To Arbitrary Inputs./ Pzmap Poles Zeros MapDocumento1 paginaLsim Simulates The (Time) Response of Continuous or Discrete Linear Systems To Arbitrary Inputs./ Pzmap Poles Zeros Maptooba mukhtarNessuna valutazione finora
- Mece306 ch04 2019 20Documento70 pagineMece306 ch04 2019 20Eren ÖzataNessuna valutazione finora
- Time ResponseDocumento22 pagineTime ResponseKenneth Louie LlorenNessuna valutazione finora
- ME5012 - Electronic Systems, Control and ComputingDocumento9 pagineME5012 - Electronic Systems, Control and ComputingMounir MikhaelNessuna valutazione finora
- CC3 Process Control NotesDocumento11 pagineCC3 Process Control NotesHens Christian FuentesNessuna valutazione finora
- Lecture-5 Transient Response Analysis of Control SystemsDocumento120 pagineLecture-5 Transient Response Analysis of Control SystemsIzhar Ahmed NoohpotoNessuna valutazione finora
- Lecture 12-13 Time Domain Analysis of 1st Order SystemsDocumento56 pagineLecture 12-13 Time Domain Analysis of 1st Order SystemsKemal ZhafNessuna valutazione finora
- Control Systems Ii: Mutaz RyalatDocumento20 pagineControl Systems Ii: Mutaz Ryalatnoder markNessuna valutazione finora
- Lec05 Frequency ResponseDocumento38 pagineLec05 Frequency ResponseRehman SaleemNessuna valutazione finora
- Week 6aDocumento15 pagineWeek 6ahairen jegerNessuna valutazione finora
- Time Response AnalysisDocumento57 pagineTime Response AnalysisAbdelnasirNessuna valutazione finora
- Control Lec 2Documento57 pagineControl Lec 2marivull2811Nessuna valutazione finora
- ES 158: Lecture 9 Laplace Transform & Frequency Response: Na LiDocumento10 pagineES 158: Lecture 9 Laplace Transform & Frequency Response: Na LiMohammad RaheelNessuna valutazione finora
- Chapter4 - Time ResponseDocumento60 pagineChapter4 - Time Responseعمر الفهدNessuna valutazione finora
- Development of Empirical Dynamic Models From Step Response DataDocumento21 pagineDevelopment of Empirical Dynamic Models From Step Response DatadhiyaulNessuna valutazione finora
- Class 15 Sept 20Documento13 pagineClass 15 Sept 20DeepthiNessuna valutazione finora
- Automatic Control 4th Year For Power and DesignDocumento74 pagineAutomatic Control 4th Year For Power and Designomarlotfy455Nessuna valutazione finora
- Process DynamicsDocumento80 pagineProcess DynamicsMahmoud MohammadNessuna valutazione finora
- Procesos de AutomatizaciónDocumento9 pagineProcesos de AutomatizaciónIsraelNessuna valutazione finora
- Chapter 3 - Time Response AnalysisDocumento31 pagineChapter 3 - Time Response AnalysisANDREW LEONG CHUN TATT STUDENTNessuna valutazione finora
- Lecture 7 Dynamic Modelling and Transient ResponseDocumento21 pagineLecture 7 Dynamic Modelling and Transient ResponseKabo MphanyaneNessuna valutazione finora
- Linear Control Systems: Time Domain Analysis of 1 Order SystemsDocumento55 pagineLinear Control Systems: Time Domain Analysis of 1 Order SystemsRIMSHA KHURSHIDNessuna valutazione finora
- TP Sys2Documento24 pagineTP Sys2Draw SmailNessuna valutazione finora
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- Matrices in R: Takeaways: SyntaxDocumento4 pagineMatrices in R: Takeaways: SyntaxHahahaNessuna valutazione finora
- R VectorsDocumento3 pagineR VectorsHahahaNessuna valutazione finora
- When Did The Crisis Start?: What Is Happening To Syrians Caught in The War?Documento2 pagineWhen Did The Crisis Start?: What Is Happening To Syrians Caught in The War?HahahaNessuna valutazione finora
- Fibre: Carbohydrates Kwashiorkor Biuret SolutionDocumento3 pagineFibre: Carbohydrates Kwashiorkor Biuret SolutionHahahaNessuna valutazione finora
- 2a Avr IoportsDocumento34 pagine2a Avr IoportsHahahaNessuna valutazione finora
- Lecture 10, April 17 & 18 2012Documento15 pagineLecture 10, April 17 & 18 2012HahahaNessuna valutazione finora
- How Is Damping Quantified?: Henrik SönnerlindDocumento11 pagineHow Is Damping Quantified?: Henrik SönnerlindAyoub FriginiNessuna valutazione finora
- CSE Lecture 2-UWE PDFDocumento4 pagineCSE Lecture 2-UWE PDFSafwan NasirNessuna valutazione finora
- Waheed Mustafa Mohammed PDFDocumento17 pagineWaheed Mustafa Mohammed PDFWaheed H HunterNessuna valutazione finora
- Measurement Assignment 4Documento2 pagineMeasurement Assignment 4Harsh SinghNessuna valutazione finora
- Chapter 2: Performance Characteristics of Instruments by Sintayehu ChallaDocumento40 pagineChapter 2: Performance Characteristics of Instruments by Sintayehu Challateza maruNessuna valutazione finora
- Frequency Response of CGA, CDA and Cascode PDFDocumento134 pagineFrequency Response of CGA, CDA and Cascode PDFAniruddh SharmaNessuna valutazione finora
- Enae 641Documento6 pagineEnae 641bob3173Nessuna valutazione finora
- Example Example: SolutionDocumento12 pagineExample Example: SolutionmiladNessuna valutazione finora
- Spring Damping On Matlab PlatformDocumento3 pagineSpring Damping On Matlab PlatformShaharior AnikNessuna valutazione finora
- Unit III Class Notes ProblemsDocumento37 pagineUnit III Class Notes Problemskumar km0% (2)
- RES2DINV Ver. 3.54: For Windows 98/Me/2000/NT/XPDocumento133 pagineRES2DINV Ver. 3.54: For Windows 98/Me/2000/NT/XPYasmin Meidiana SyarifNessuna valutazione finora
- Design LabDocumento76 pagineDesign LabRajath AcharyaNessuna valutazione finora
- ME8594-Dynamics of MachinesDocumento29 pagineME8594-Dynamics of MachinesVinoth KumarNessuna valutazione finora
- Student Manual of Damped & Un DampedDocumento3 pagineStudent Manual of Damped & Un DampedaqibNessuna valutazione finora
- Module 4 - Spring 2019 - 5.5.20Documento59 pagineModule 4 - Spring 2019 - 5.5.20Mohammad JavedNessuna valutazione finora
- Control Systems: Basil HamedDocumento71 pagineControl Systems: Basil Hamedkhaled jNessuna valutazione finora
- XFLR5 and Stability AnalysisDocumento70 pagineXFLR5 and Stability AnalysisMagno Lozano GuzmanNessuna valutazione finora
- Assignment 2Documento2 pagineAssignment 2Abhishek ChaurasiyaNessuna valutazione finora
- Free Vibration of One Degree of Freedom Systems: Initial DeviationDocumento8 pagineFree Vibration of One Degree of Freedom Systems: Initial DeviationEugine BalomagaNessuna valutazione finora
- 11 Machine FoundationDocumento41 pagine11 Machine FoundationFenil ShuklaNessuna valutazione finora
- Dynamic ProblemDocumento3 pagineDynamic ProblemKavish RanaNessuna valutazione finora
- Electrical Transducer Nomenclature and Terminology: ISA-S37.1-1975 (R 1982)Documento28 pagineElectrical Transducer Nomenclature and Terminology: ISA-S37.1-1975 (R 1982)Carlos Andres Porras NinoNessuna valutazione finora
- 28 - Weber - Energy Based Optimization of Viscous-Friction Dampers On CablesDocumento12 pagine28 - Weber - Energy Based Optimization of Viscous-Friction Dampers On Cablesmocker1987Nessuna valutazione finora
- ME7732 Lecture 1 - Basics of Control Engineering - BADocumento79 pagineME7732 Lecture 1 - Basics of Control Engineering - BATaiwo TaiwoNessuna valutazione finora
- LAB 5 VibrationDocumento6 pagineLAB 5 Vibrationmohdiqbal930% (1)