Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Powerpoint Presentation R.A 7877 - Anti Sexual Harassment ActDocumento14 paginePowerpoint Presentation R.A 7877 - Anti Sexual Harassment ActApple100% (1)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Projectile Multiple ChoiceDocumento4 pagineProjectile Multiple ChoiceLin Xian XingNessuna valutazione finora
- Chapter 10-Work Energy and PowerDocumento15 pagineChapter 10-Work Energy and PowerLin Xian Xing100% (1)
- Conflict WaiverDocumento2 pagineConflict WaiverjlurosNessuna valutazione finora
- Exercise 23 - Sulfur OintmentDocumento4 pagineExercise 23 - Sulfur OintmentmaimaiNessuna valutazione finora
- Pro Tools ShortcutsDocumento5 paginePro Tools ShortcutsSteveJones100% (1)
- Chem 154 LE4 SamplexDocumento3 pagineChem 154 LE4 SamplexLin Xian XingNessuna valutazione finora
- SH210 5 SERVCE CD PDF Pages 1 33Documento33 pagineSH210 5 SERVCE CD PDF Pages 1 33Em sulistio87% (23)
- 060 Half Life WorksheetDocumento3 pagine060 Half Life WorksheetLin Xian XingNessuna valutazione finora
- Steam Source Book PDFDocumento108 pagineSteam Source Book PDFJose Levican A100% (1)
- Agreement Deed BangladeshDocumento8 pagineAgreement Deed BangladeshVabna EnterpriseNessuna valutazione finora
- 111 Prob Set 3Documento1 pagina111 Prob Set 3Lin Xian XingNessuna valutazione finora
- CHM12 3lu6 PDFDocumento97 pagineCHM12 3lu6 PDFLin Xian XingNessuna valutazione finora
- Lec07 Special RelativityDocumento20 pagineLec07 Special RelativityLin Xian XingNessuna valutazione finora
- Composition of MuscleDocumento41 pagineComposition of MuscleLin Xian XingNessuna valutazione finora
- CHEM443 Fall 2014 Oldquiz1 SolutionDocumento4 pagineCHEM443 Fall 2014 Oldquiz1 SolutionLin Xian XingNessuna valutazione finora
- Test 07 Energy 05dkDocumento13 pagineTest 07 Energy 05dkLin Xian XingNessuna valutazione finora
- Use Your Time Wisely.: Exam 3 Chemistry 122 April 20, 2009Documento7 pagineUse Your Time Wisely.: Exam 3 Chemistry 122 April 20, 2009Lin Xian XingNessuna valutazione finora
- Acid Base Equilibria PDFDocumento30 pagineAcid Base Equilibria PDFLin Xian XingNessuna valutazione finora
- CHM11-3Lecture Unit #1 PDFDocumento57 pagineCHM11-3Lecture Unit #1 PDFLin Xian XingNessuna valutazione finora
- Rect Comp 2dDocumento39 pagineRect Comp 2dLin Xian XingNessuna valutazione finora
- Wpe WorksheetDocumento2 pagineWpe WorksheetLin Xian Xing0% (1)
- PHY11 Lesson 9 Fluids in MotionDocumento18 paginePHY11 Lesson 9 Fluids in MotionLin Xian XingNessuna valutazione finora
- Fef 11Documento15 pagineFef 11Lin Xian XingNessuna valutazione finora
- Knight27 Gauss LectDocumento14 pagineKnight27 Gauss LectLin Xian XingNessuna valutazione finora
- Liga NG Mga Barangay: Resolution No. 30Documento2 pagineLiga NG Mga Barangay: Resolution No. 30Rey PerezNessuna valutazione finora
- Quantum Hopfield NetworksDocumento83 pagineQuantum Hopfield NetworksSiddharth SharmaNessuna valutazione finora
- Tenancy Law ReviewerDocumento19 pagineTenancy Law ReviewerSef KimNessuna valutazione finora
- Dr. Li Li Prof. Feng Wu Beijing Institute of TechnologyDocumento20 pagineDr. Li Li Prof. Feng Wu Beijing Institute of TechnologyNarasimman NarayananNessuna valutazione finora
- IP Based Fingerprint Access Control & Time Attendance: FeatureDocumento2 pagineIP Based Fingerprint Access Control & Time Attendance: FeaturenammarisNessuna valutazione finora
- Entrep Q4 - Module 7Documento5 pagineEntrep Q4 - Module 7Paula DT PelitoNessuna valutazione finora
- Cds13041 Yamaha PWC Plug-In EcuDocumento1 paginaCds13041 Yamaha PWC Plug-In EcuGérôme ZélateurNessuna valutazione finora
- Fletcher Theophilus Ato CVDocumento7 pagineFletcher Theophilus Ato CVTHEOPHILUS ATO FLETCHERNessuna valutazione finora
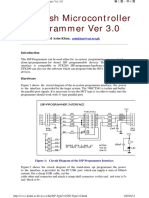
- ISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanDocumento4 pagineISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanSrđan PavićNessuna valutazione finora
- CH 2 Nature of ConflictDocumento45 pagineCH 2 Nature of ConflictAbdullahAlNoman100% (2)
- BPL-DF 2617aedrDocumento3 pagineBPL-DF 2617aedrBiomedical Incharge SRM TrichyNessuna valutazione finora
- 7Documento101 pagine7Navindra JaggernauthNessuna valutazione finora
- A Religious LeadershipDocumento232 pagineA Religious LeadershipBonganiNessuna valutazione finora
- Toa Valix Vol 1Documento451 pagineToa Valix Vol 1Joseph Andrei BunadoNessuna valutazione finora
- Tate Modern London, Pay Congestion ChargeDocumento6 pagineTate Modern London, Pay Congestion ChargeCongestionChargeNessuna valutazione finora
- BACE Marketing Presentation FINALDocumento14 pagineBACE Marketing Presentation FINALcarlosfelix810% (1)
- Portfolio Report Zarin Tasnim Tazin 1920143 8Documento6 paginePortfolio Report Zarin Tasnim Tazin 1920143 8Fahad AlfiNessuna valutazione finora
- Stock Prediction SynopsisDocumento3 pagineStock Prediction SynopsisPiyushPurohitNessuna valutazione finora
- Residential BuildingDocumento5 pagineResidential Buildingkamaldeep singhNessuna valutazione finora
- Lenskart SheetDocumento1 paginaLenskart SheetThink School libraryNessuna valutazione finora
- Microeconomics: Production, Cost Minimisation, Profit MaximisationDocumento19 pagineMicroeconomics: Production, Cost Minimisation, Profit Maximisationhishamsauk50% (2)
- The Finley ReportDocumento46 pagineThe Finley ReportToronto StarNessuna valutazione finora
- 87 - Case Study On Multicomponent Distillation and Distillation Column SequencingDocumento15 pagine87 - Case Study On Multicomponent Distillation and Distillation Column SequencingFranklin Santiago Suclla Podesta50% (2)