Potrebbero piacerti anche
- Chapter 5 GearDocumento9 pagineChapter 5 GearNEF RIDERSNessuna valutazione finora
- Gear Notes - SlideDocumento19 pagineGear Notes - SlideNEF RIDERSNessuna valutazione finora
- Book 6.3.1 Gear Terms Lesson Rev3Documento16 pagineBook 6.3.1 Gear Terms Lesson Rev3Wil NelsonNessuna valutazione finora
- Gear MeasurementDocumento12 pagineGear MeasurementCobra BabaNessuna valutazione finora
- DJJ 10033-Chapter 5.GEARDocumento34 pagineDJJ 10033-Chapter 5.GEARStepianus JtNessuna valutazione finora
- Inspection of Additive Manufactured Spur Gears Using Machine LearningDocumento7 pagineInspection of Additive Manufactured Spur Gears Using Machine LearningabcNessuna valutazione finora
- Get The GearsDocumento3 pagineGet The GearsPredrag PavlovicNessuna valutazione finora
- Gears, Splines, and Serrations: Unit 24Documento8 pagineGears, Splines, and Serrations: Unit 24Satish Dhandole100% (1)
- DJJ 10033-Chapter 5Documento45 pagineDJJ 10033-Chapter 5Abbas SeuNessuna valutazione finora
- 2 Gear BasicsDocumento6 pagine2 Gear BasicsMohamed Adel RizkNessuna valutazione finora
- Gear TrainsDocumento24 pagineGear Trainsjacob ellyNessuna valutazione finora
- Design Consideration of Transmisson SystemDocumento39 pagineDesign Consideration of Transmisson SystemKaung KhantNessuna valutazione finora
- Lab Report 5Documento11 pagineLab Report 5Areeba MujtabaNessuna valutazione finora
- Lecture On Gear-MeasurementDocumento29 pagineLecture On Gear-MeasurementSachin100% (1)
- Gears Very BasicDocumento5 pagineGears Very BasicpetsatNessuna valutazione finora
- The Module of A Gear: (1) About GearsDocumento1 paginaThe Module of A Gear: (1) About GearsAnonymous rYwUkpNessuna valutazione finora
- Chapter#3 Assignment#1Documento5 pagineChapter#3 Assignment#1Tilahun WorkuNessuna valutazione finora
- Parametric Modelling of Straight Bevel Gearing System and Analyze The Forces and Stresses by Analytical ApproachDocumento5 pagineParametric Modelling of Straight Bevel Gearing System and Analyze The Forces and Stresses by Analytical ApproachseventhsensegroupNessuna valutazione finora
- Faculty Orientation Programme-2017 SAE, Mechanical Department, Kondhwa, PuneDocumento57 pagineFaculty Orientation Programme-2017 SAE, Mechanical Department, Kondhwa, Puneraghav maskeNessuna valutazione finora
- 6.3.1 Gear Terms Lesson Rev3Documento19 pagine6.3.1 Gear Terms Lesson Rev3meg77717Nessuna valutazione finora
- Gear Tooth Thickness MeasurmentDocumento7 pagineGear Tooth Thickness MeasurmentYohannes Mengistu AbebeNessuna valutazione finora
- Design of Spur Gear - Fundamentals - 1Documento19 pagineDesign of Spur Gear - Fundamentals - 1Dhyan PatelNessuna valutazione finora
- Gear Heel Pitch DiameterDocumento5 pagineGear Heel Pitch DiameterMadnutsNessuna valutazione finora
- Gear Template Generato1 (Plantillas para El Diseño de Engranes)Documento8 pagineGear Template Generato1 (Plantillas para El Diseño de Engranes)GomitahNessuna valutazione finora
- Gear Template Generator: Explain FieldsDocumento8 pagineGear Template Generator: Explain FieldsGomitahNessuna valutazione finora
- Gears: Gear Types 1.2 Gear Nomenclature and FormulasDocumento17 pagineGears: Gear Types 1.2 Gear Nomenclature and FormulasDarwin LimNessuna valutazione finora
- GearsDocumento25 pagineGearsDarwin LimNessuna valutazione finora
- Experiment No (6) Spur Gear Terms and ConceptsDocumento3 pagineExperiment No (6) Spur Gear Terms and ConceptsHayfa SalihNessuna valutazione finora
- The Involute Curve, Drafting A Gear in CAD and ApplicationsDocumento15 pagineThe Involute Curve, Drafting A Gear in CAD and ApplicationsPepe Garcia CruzNessuna valutazione finora
- 6-Screw and Gear MeasurementDocumento50 pagine6-Screw and Gear MeasurementRohit BhangaleNessuna valutazione finora
- Helical GearDocumento5 pagineHelical GearMohsin IftikharNessuna valutazione finora
- Involute Gear ProfileDocumento8 pagineInvolute Gear ProfiledressfeetNessuna valutazione finora
- Chap-6 Gears 1Documento30 pagineChap-6 Gears 1AlysNessuna valutazione finora
- Cad Lab Report 5Documento11 pagineCad Lab Report 5Areeba MujtabaNessuna valutazione finora
- Basic Gear Terminology and Calculation - KHK GearsDocumento10 pagineBasic Gear Terminology and Calculation - KHK GearsJoab Max Apaza MartinezNessuna valutazione finora
- Gear Module Formulae PDFDocumento1 paginaGear Module Formulae PDFArun Kiran100% (1)
- Gear TerminologyDocumento42 pagineGear Terminologyyair Enrique Romero OspinoNessuna valutazione finora
- Metric Module DetailsDocumento2 pagineMetric Module DetailsAriful IslamNessuna valutazione finora
- Gear Drawing PDFDocumento12 pagineGear Drawing PDFpradeep315Nessuna valutazione finora
- The Involute Curve, Drafting A Gear in CAD and Applications by Nick CarterDocumento12 pagineThe Involute Curve, Drafting A Gear in CAD and Applications by Nick Carterseis11Nessuna valutazione finora
- MODULE 6 - Spur GearDocumento13 pagineMODULE 6 - Spur GearBoris PalaoNessuna valutazione finora
- Mechanical Measurements and MetrologyDocumento28 pagineMechanical Measurements and MetrologySandeep OholNessuna valutazione finora
- Hypoid Gears With Involute Teeth: David B. DoonerDocumento6 pagineHypoid Gears With Involute Teeth: David B. DoonerLibardo Cardenas PNessuna valutazione finora
- Read Me Gear Template Gener v3Documento8 pagineRead Me Gear Template Gener v3EdûûAlphonseDiazNessuna valutazione finora
- CH08 2Documento52 pagineCH08 2abdallah ghannamNessuna valutazione finora
- Elements of Metric Gear Technology: Table 1-5 (Cont.) Spur Gear Design FormulasDocumento13 pagineElements of Metric Gear Technology: Table 1-5 (Cont.) Spur Gear Design FormulasRakeshvb10Nessuna valutazione finora
- Spur and Gear Trains KOM PDFDocumento18 pagineSpur and Gear Trains KOM PDFSam prabhakarNessuna valutazione finora
- Measurement of Lines & SurfacesDocumento84 pagineMeasurement of Lines & Surfacessushil.vgiNessuna valutazione finora
- 6.3.1 Gear Terms Lesson Rev3Documento19 pagine6.3.1 Gear Terms Lesson Rev3Deepak GirotraNessuna valutazione finora
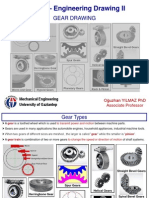
- Machine Design & Drawing - II - GEARSDocumento12 pagineMachine Design & Drawing - II - GEARSSenthil KumarNessuna valutazione finora
- Me472 10Documento0 pagineMe472 10dreadwarriorNessuna valutazione finora
- Manual of Engineering Drawing: British and International StandardsDa EverandManual of Engineering Drawing: British and International StandardsValutazione: 3.5 su 5 stelle3.5/5 (4)
- NX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)Da EverandNX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)Nessuna valutazione finora
- SolidWorks 2016 Learn by doing 2016 - Part 3Da EverandSolidWorks 2016 Learn by doing 2016 - Part 3Valutazione: 3.5 su 5 stelle3.5/5 (3)
- SolidWorks 2015 Learn by doing-Part 3 (DimXpert and Rendering)Da EverandSolidWorks 2015 Learn by doing-Part 3 (DimXpert and Rendering)Valutazione: 4.5 su 5 stelle4.5/5 (5)
- 3D Printing of Medical Models from Ct-Mri Images: A Practical Step-By-Step GuideDa Everand3D Printing of Medical Models from Ct-Mri Images: A Practical Step-By-Step GuideNessuna valutazione finora
- GCSE Maths Revision: Cheeky Revision ShortcutsDa EverandGCSE Maths Revision: Cheeky Revision ShortcutsValutazione: 3.5 su 5 stelle3.5/5 (2)
- Employability Skills: Brush up Your EngineeringDa EverandEmployability Skills: Brush up Your EngineeringNessuna valutazione finora
- Gear Transmission Error Measurements Based On The Phase DemodulationDocumento8 pagineGear Transmission Error Measurements Based On The Phase Demodulationtapas ranjan jenaNessuna valutazione finora
- Procedure To Determine The Parameters of An Unknown Spur Gear (Metric) With Involute Profile TeethDocumento1 paginaProcedure To Determine The Parameters of An Unknown Spur Gear (Metric) With Involute Profile Teethtapas ranjan jenaNessuna valutazione finora
- Research On A Measurement Principle of The Double-Flank Gear Rolling Test With Many Degrees of Freedom For Fast InspectionDocumento6 pagineResearch On A Measurement Principle of The Double-Flank Gear Rolling Test With Many Degrees of Freedom For Fast Inspectiontapas ranjan jenaNessuna valutazione finora
- Geometrical Specification Model For Gear - Expression, Metrology and AnalysisDocumento4 pagineGeometrical Specification Model For Gear - Expression, Metrology and Analysistapas ranjan jenaNessuna valutazione finora
- Meilin Li and Nanlin YuDocumento4 pagineMeilin Li and Nanlin Yutapas ranjan jenaNessuna valutazione finora
- SandpaperSelectionUse PDFDocumento4 pagineSandpaperSelectionUse PDFtapas ranjan jenaNessuna valutazione finora
- Of Kent USA Not ReproduceDocumento53 pagineOf Kent USA Not Reproducetapas ranjan jenaNessuna valutazione finora
- TIP 27 - Cutting Bevel Gears On A Sherline CNC/David LehrianDocumento8 pagineTIP 27 - Cutting Bevel Gears On A Sherline CNC/David Lehriantapas ranjan jenaNessuna valutazione finora
- Gears MachiningDocumento49 pagineGears Machiningtapas ranjan jenaNessuna valutazione finora
- Brochure GearGrindingDocumento9 pagineBrochure GearGrindingtapas ranjan jenaNessuna valutazione finora
- Boston Gear - Spur Gears PDFDocumento46 pagineBoston Gear - Spur Gears PDFtapas ranjan jenaNessuna valutazione finora
- SERVOMECH Bevel Gearboxes Catalogue 01 12 PDFDocumento52 pagineSERVOMECH Bevel Gearboxes Catalogue 01 12 PDFtapas ranjan jena0% (1)
- ASME PTC 22 (Gas Turbine Test Code)Documento46 pagineASME PTC 22 (Gas Turbine Test Code)Nanang Hanani Wijaya100% (5)
- Computational Fluid Dynamics (CFD) Modeling of Grain-Water Suspensions in TubeDocumento15 pagineComputational Fluid Dynamics (CFD) Modeling of Grain-Water Suspensions in TubebhuniakanishkaNessuna valutazione finora
- Mi 9664 TDocumento5 pagineMi 9664 Tamir barekatiNessuna valutazione finora
- RAC GRADE 9 Q1 W 4 M 4 FINAlDocumento11 pagineRAC GRADE 9 Q1 W 4 M 4 FINAlOviya EikoNessuna valutazione finora
- DRG ListDocumento272 pagineDRG ListVijay PalNessuna valutazione finora
- S.P.Catalog TNT600I600GS-3 2020-Ver 200908Documento97 pagineS.P.Catalog TNT600I600GS-3 2020-Ver 200908Rjay HayNessuna valutazione finora
- Intergraph Caesar Course ContentDocumento2 pagineIntergraph Caesar Course ContentValesh MonisNessuna valutazione finora
- Technical Catalogue ULMA Conveyor 2016Documento54 pagineTechnical Catalogue ULMA Conveyor 2016Nasir NeyazNessuna valutazione finora
- Stair Well Pressurization Design CriteriaDocumento2 pagineStair Well Pressurization Design CriteriaShabeer HamzaNessuna valutazione finora
- X X H H S S: Department of Mechanical EngineeringDocumento5 pagineX X H H S S: Department of Mechanical EngineeringSeila MolinaNessuna valutazione finora
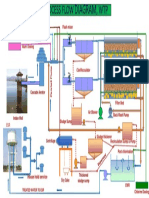
- WTP Process DiagramDocumento1 paginaWTP Process DiagramKumar AbhishekNessuna valutazione finora
- Landing Gear Sistem 556Documento31 pagineLanding Gear Sistem 556prasetyoNessuna valutazione finora
- XTRACT Calculul Unui Perete de B.ADocumento1 paginaXTRACT Calculul Unui Perete de B.AHDu13Nessuna valutazione finora
- Quasiturbine EngineDocumento16 pagineQuasiturbine Engineapi-238832008100% (1)
- Hydraulic Fan System 966Documento4 pagineHydraulic Fan System 966Ahmed Rezk100% (2)
- Physics Cun It PacketsDocumento226 paginePhysics Cun It PacketsRana MukherjeeNessuna valutazione finora
- Slab Analysis of Ring Rolling AssumingConstantShearFrictionDocumento7 pagineSlab Analysis of Ring Rolling AssumingConstantShearFrictionMatteo Dalla Vecchia100% (1)
- Retentor Din 3760Documento13 pagineRetentor Din 3760Marcelo Godinho BatistaNessuna valutazione finora
- R1 PDFDocumento15 pagineR1 PDFaliNessuna valutazione finora
- Lecture 2 UpdateDocumento80 pagineLecture 2 Updateماجد مدحت سعيدNessuna valutazione finora
- JoysticksDocumento12 pagineJoysticksJuan Carlos Aragon CompiNessuna valutazione finora
- Access - Catalog.805b.Color - DP&Casing Tools-51Documento1 paginaAccess - Catalog.805b.Color - DP&Casing Tools-51RICHARDNessuna valutazione finora
- Djj10022 Fitting ReportDocumento7 pagineDjj10022 Fitting ReportTamil passang songNessuna valutazione finora
- Circuit A Pression Prioritaire Proportionnelle Compensee 3PCDocumento22 pagineCircuit A Pression Prioritaire Proportionnelle Compensee 3PCEbrahem Ahmed Hafez100% (3)
- Cavallini 2013Documento14 pagineCavallini 2013Satheesh Kumar SNessuna valutazione finora
- Belt Alignment ToolDocumento2 pagineBelt Alignment ToolAshutosh VishwakarmaNessuna valutazione finora
- Komal Kumar Mallick PDFDocumento2 pagineKomal Kumar Mallick PDFKomal KumarNessuna valutazione finora
- Assessment of Stability of Large Caverns in Himalayas Using 3D Numerical ModellingDocumento14 pagineAssessment of Stability of Large Caverns in Himalayas Using 3D Numerical Modellingpradhith kattaNessuna valutazione finora
- Characteristics of DC Motor: 1. Torque-Armature Current CharacteristicsDocumento8 pagineCharacteristics of DC Motor: 1. Torque-Armature Current CharacteristicsBilbo BagginsNessuna valutazione finora
- Technical Specifications For ValvesDocumento32 pagineTechnical Specifications For ValvesEr Hussain GhadialiNessuna valutazione finora