Potrebbero piacerti anche
- Filtros de Banda Aplicados 'A An Alise DEMON Com Separac Ao Cega de Fontes em Sinais de Sonar PassivoDocumento4 pagineFiltros de Banda Aplicados 'A An Alise DEMON Com Separac Ao Cega de Fontes em Sinais de Sonar PassivoVinicius MelloNessuna valutazione finora
- Modulacao Extra2 PDFDocumento68 pagineModulacao Extra2 PDFVinicius MelloNessuna valutazione finora
- E Book Como Montar Sua Carteira de Investimentos PDFDocumento14 pagineE Book Como Montar Sua Carteira de Investimentos PDFtvapjNessuna valutazione finora
- E Book Como Montar Sua Carteira de Investimentos PDFDocumento14 pagineE Book Como Montar Sua Carteira de Investimentos PDFtvapjNessuna valutazione finora
- Auditoria em Saúde 2014 PDFDocumento66 pagineAuditoria em Saúde 2014 PDFenffranzoniNessuna valutazione finora
- E Book Como Montar Sua Carteira de Investimentos PDFDocumento14 pagineE Book Como Montar Sua Carteira de Investimentos PDFtvapjNessuna valutazione finora
- Ceii PDFDocumento431 pagineCeii PDFVinicius MelloNessuna valutazione finora
- Eletrônica - SlidesDocumento273 pagineEletrônica - SlidesVinicius MelloNessuna valutazione finora
- 2008intertech-Criptografia 1 PDFDocumento3 pagine2008intertech-Criptografia 1 PDFVinicius MelloNessuna valutazione finora
- Apostila CEIIDocumento390 pagineApostila CEIIVinicius MelloNessuna valutazione finora
- Dicas de Apresentacao de ArtigosDocumento4 pagineDicas de Apresentacao de ArtigosVinicius MelloNessuna valutazione finora
- Formulario Editado 2014Documento12 pagineFormulario Editado 2014Vinicius MelloNessuna valutazione finora
- Python IntermediarioDocumento43 paginePython IntermediariolmlemosNessuna valutazione finora
- A PRESENÃA DA - LGEBRA LINEAR E TEORIA DOS N+MEROS NA CRIPTàDocumento10 pagineA PRESENÃA DA - LGEBRA LINEAR E TEORIA DOS N+MEROS NA CRIPTàGabriel Souza Rangel SantosNessuna valutazione finora
- 10 - Motor - DCDocumento5 pagine10 - Motor - DCVinicius MelloNessuna valutazione finora
- 1 - IntroduçãoDocumento4 pagine1 - IntroduçãoVinicius MelloNessuna valutazione finora
- Black Hat Python para Hackers e PentestersDocumento114 pagineBlack Hat Python para Hackers e PentestersVictor CalixtoNessuna valutazione finora
- Orientação A Objetos - Java PDFDocumento224 pagineOrientação A Objetos - Java PDFLeonardo Araújo BrunoNessuna valutazione finora
- 14 Root LocusDocumento12 pagine14 Root LocusVinicius MelloNessuna valutazione finora
- 3 - Modelacao MecanicaDocumento8 pagine3 - Modelacao MecanicaVinicius MelloNessuna valutazione finora
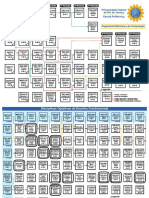
- Fluxograma de DisciplinasDocumento4 pagineFluxograma de DisciplinasVinicius MelloNessuna valutazione finora
- Pranayama - Técnicas de Respiração Consciente e CurativaDocumento4 paginePranayama - Técnicas de Respiração Consciente e CurativaVinicius MelloNessuna valutazione finora
- Wifi - UFRJDocumento1 paginaWifi - UFRJVinicius MelloNessuna valutazione finora
- (Ebook) Guia de Sucesso Na Bolsa de ValoresDocumento29 pagine(Ebook) Guia de Sucesso Na Bolsa de ValoresAntonioMarquesNessuna valutazione finora
- Minicursomatlab PDFDocumento76 pagineMinicursomatlab PDFVinicius MelloNessuna valutazione finora
- Orientação A Objetos - Java PDFDocumento224 pagineOrientação A Objetos - Java PDFLeonardo Araújo BrunoNessuna valutazione finora
- Aula 01Documento5 pagineAula 01Vinicius MelloNessuna valutazione finora
- Teoria Dos Números (Rudolf R. Maier)Documento139 pagineTeoria Dos Números (Rudolf R. Maier)Lucas Lugão Guimarães100% (1)
- Circuitos DiodosDocumento7 pagineCircuitos DiodosAnonymous GofzGQiNessuna valutazione finora