Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- EConsole1 Quick Start Guide ENGDocumento21 pagineEConsole1 Quick Start Guide ENGManuel Casais TajesNessuna valutazione finora
- Incompressible Flow in Pipe Networks.Documento7 pagineIncompressible Flow in Pipe Networks.Ayub Ali WehelieNessuna valutazione finora
- VT300 User ManualDocumento21 pagineVT300 User ManualLuvNessuna valutazione finora
- 10 2Documento26 pagine10 2cristinatubleNessuna valutazione finora
- Tech Specs - TC 5540 PDFDocumento2 pagineTech Specs - TC 5540 PDFziaarkiplanNessuna valutazione finora
- Nihonto Part IDocumento38 pagineNihonto Part IGergő VidaNessuna valutazione finora
- Three - Dimensional Viscous Confinement and Cooling of Atoms by Resonance Radiation PressureDocumento6 pagineThree - Dimensional Viscous Confinement and Cooling of Atoms by Resonance Radiation PressureWenjun ZhangNessuna valutazione finora
- Introduction To Java Programming ReviewerDocumento90 pagineIntroduction To Java Programming ReviewerJohn Ryan FranciscoNessuna valutazione finora
- K46 ManualDocumento8 pagineK46 ManualDavid KasaiNessuna valutazione finora
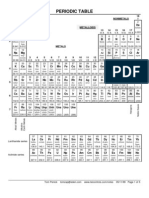
- Periodic Table and AtomsDocumento5 paginePeriodic Table and AtomsShoroff AliNessuna valutazione finora
- Audio Evolution Mobile User Manual For AndroidDocumento336 pagineAudio Evolution Mobile User Manual For AndroidkbalazsNessuna valutazione finora
- Infinera Ds Isfp Timedivision Multiplexing ModulesDocumento3 pagineInfinera Ds Isfp Timedivision Multiplexing ModulesAnonymous bpf0OZSd9Nessuna valutazione finora
- Degree of ComparisonDocumento23 pagineDegree of Comparisonesalisa23Nessuna valutazione finora
- Types of Solids 1Documento16 pagineTypes of Solids 1Fern BaldonazaNessuna valutazione finora
- User's Manual HEIDENHAIN Conversational Format ITNC 530Documento747 pagineUser's Manual HEIDENHAIN Conversational Format ITNC 530Mohamed Essam Mohamed100% (2)
- Guide-to-Proficiency-Testing-Australia 2019Documento29 pagineGuide-to-Proficiency-Testing-Australia 2019ffatikatuss100% (1)
- Allison 1,000 & 2,000 Group 21Documento4 pagineAllison 1,000 & 2,000 Group 21Robert WhooleyNessuna valutazione finora
- PPF CalculatorDocumento2 paginePPF CalculatorshashanamouliNessuna valutazione finora
- Spark: Owner's ManualDocumento5 pagineSpark: Owner's Manualjorge medinaNessuna valutazione finora
- Acuvim II Profibus Modules Users Manual v1.10Documento36 pagineAcuvim II Profibus Modules Users Manual v1.10kamran719Nessuna valutazione finora
- Ways To Multiply and Divide: Maniratnam - The CashierDocumento17 pagineWays To Multiply and Divide: Maniratnam - The CashierSundari MuruganNessuna valutazione finora
- CHMT 2009 Week 5 Coal PropertiesDocumento38 pagineCHMT 2009 Week 5 Coal PropertiesTiisetso MokwaneNessuna valutazione finora
- (Complete) Electrolysis of Copper SulphateDocumento4 pagine(Complete) Electrolysis of Copper SulphateNoooooNessuna valutazione finora
- Unit Exam 5Documento3 pagineUnit Exam 5Rose AstoNessuna valutazione finora
- Siemens Micromaster 440 Manual PDFDocumento312 pagineSiemens Micromaster 440 Manual PDFGustavo Barrera100% (1)
- CCNA2 Lab 7 3 8 enDocumento6 pagineCCNA2 Lab 7 3 8 enapi-3809703100% (1)
- Nuclear Fusion EnergyDocumento3 pagineNuclear Fusion EnergyAner Labaka UgarteNessuna valutazione finora
- 2023-1509 TopSolid'Design Library Designer's GuideDocumento21 pagine2023-1509 TopSolid'Design Library Designer's GuideMáy TiệnNessuna valutazione finora
- 7625-300 Vitamin B12 AccuBind ELISA Rev 6Documento2 pagine7625-300 Vitamin B12 AccuBind ELISA Rev 6carlosalfredorivasNessuna valutazione finora