Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Chemicalbonding 130621001159 Phpapp02Documento12 pagineChemicalbonding 130621001159 Phpapp02MathiTwadCNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Suitability of Manufacture Sand (M-Sand) As Fine Aggregate in Mortars and ConcreteDocumento16 pagineSuitability of Manufacture Sand (M-Sand) As Fine Aggregate in Mortars and Concreteprs226Nessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Drop CapDocumento3 pagineDrop CapMathiTwadCNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- In-Line Check Valves For Water Hammer Co PDFDocumento22 pagineIn-Line Check Valves For Water Hammer Co PDFMathiTwadCNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Family Medicare Prospectus 2014Documento11 pagineFamily Medicare Prospectus 2014Veera MuthuNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Depth of RootDocumento2 pagineDepth of RootMathiTwadCNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- XIX Paper 14 PDFDocumento20 pagineXIX Paper 14 PDFMathiTwadCNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Vray-Rendering An Interior SceneDocumento12 pagineVray-Rendering An Interior SceneSasmita GuruNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Npsa in Pumps Ansi Hi 9 6-3-1997Documento18 pagineNpsa in Pumps Ansi Hi 9 6-3-1997Luis Garrido Marín100% (4)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- MOBILE BANKING User GuidelinesDocumento13 pagineMOBILE BANKING User GuidelinesamitvadaveraoNessuna valutazione finora
- 3ds Max Key PointDocumento1 pagina3ds Max Key PointMathiTwadCNessuna valutazione finora
- Cenrifuge House-Floor DetailsDocumento3 pagineCenrifuge House-Floor DetailsMathiTwadCNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Cement Exise DutyDocumento4 pagineCement Exise DutyMathiTwadCNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- VRay BasicDocumento29 pagineVRay BasicIoana StanNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- III Year Question PaperDocumento93 pagineIII Year Question PaperMathiTwadC0% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Handbook On Hazardous Child Labour: Employers' and Workers'Documento66 pagineHandbook On Hazardous Child Labour: Employers' and Workers'MathiTwadCNessuna valutazione finora
- WaterSolution Brochure 2014update LTR Screen enDocumento8 pagineWaterSolution Brochure 2014update LTR Screen enMathiTwadCNessuna valutazione finora
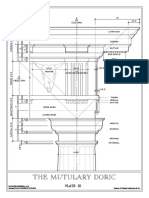
- The Doric Order MutularyDocumento1 paginaThe Doric Order MutularyMathiTwadCNessuna valutazione finora
- 2013 Wonderware Training Catalog RevA PDFDocumento47 pagine2013 Wonderware Training Catalog RevA PDFMathiTwadCNessuna valutazione finora
- SSWT-Update by Dillon June 4 2007Documento165 pagineSSWT-Update by Dillon June 4 2007MathiTwadCNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- April 13 Fig 1 PDFDocumento1 paginaApril 13 Fig 1 PDFMathiTwadCNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Design of 6 Storey Building in EtabsDocumento51 pagineDesign of 6 Storey Building in EtabsMisqal A Iqbal100% (2)
- Childlabourppt 111220115051 Phpapp01Documento12 pagineChildlabourppt 111220115051 Phpapp01MathiTwadCNessuna valutazione finora
- Sample Business Plan of A Training CentreDocumento31 pagineSample Business Plan of A Training CentreTanya Dewani100% (3)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Science 4 DLP 15 - The Path of FoodDocumento10 pagineScience 4 DLP 15 - The Path of FoodMathiTwadCNessuna valutazione finora
- Foundations Theory & DesignDocumento35 pagineFoundations Theory & Designbhavik91100% (2)
- ChlorineDocumento44 pagineChlorineEttore Lalla100% (1)
- Stepped Footing - 1 PDFDocumento11 pagineStepped Footing - 1 PDFSushil Dhungana93% (15)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Padasalai-Net-Go Ms No 303 Finance - Pay-Cell Dated 11-10-2017 Fc-FinalDocumento33 paginePadasalai-Net-Go Ms No 303 Finance - Pay-Cell Dated 11-10-2017 Fc-FinalMathiTwadCNessuna valutazione finora
- Family Medicare Prospectus 2014Documento11 pagineFamily Medicare Prospectus 2014Veera MuthuNessuna valutazione finora
- Properties of Liquids and Intermolecular ForcesDocumento5 pagineProperties of Liquids and Intermolecular ForcesJohnnard BelenNessuna valutazione finora
- Efficiency Improvement of Flat Plate Solar Collector Using ReflectorDocumento6 pagineEfficiency Improvement of Flat Plate Solar Collector Using ReflectorAnonymous iHJPiQI7Nessuna valutazione finora
- Production and Evaluation of Field Metallographic Replicas: Standard Practice ForDocumento6 pagineProduction and Evaluation of Field Metallographic Replicas: Standard Practice Forcatalina mazoNessuna valutazione finora
- ManuscriptDocumento60 pagineManuscriptMalek MahmoudNessuna valutazione finora
- Weather Station InstructionsDocumento6 pagineWeather Station InstructionsCesar NavarroNessuna valutazione finora
- Fluid Flow OperationDocumento2 pagineFluid Flow OperationShubham imtsNessuna valutazione finora
- Seleccion de MaterialesDocumento40 pagineSeleccion de MaterialessoniaNessuna valutazione finora
- PDFDocumento228 paginePDFGayan Madushan KandethanthriNessuna valutazione finora
- Macam-Macam Dan Sifat Bahan Resin Kedokteran Gigi - Bimo RintokoDocumento18 pagineMacam-Macam Dan Sifat Bahan Resin Kedokteran Gigi - Bimo Rintokodayanara_245104654Nessuna valutazione finora
- Mini VRFDocumento34 pagineMini VRFPaulo Vitor Santos100% (1)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Doctoral Thesis by S ChaterjeeDocumento159 pagineDoctoral Thesis by S ChaterjeeSaikat ChaterjeeNessuna valutazione finora
- Heating Water and Glycerin in Counter-Flow Heat ExchangersDocumento5 pagineHeating Water and Glycerin in Counter-Flow Heat ExchangersRyan MagasoNessuna valutazione finora
- Arundeep's ICSE MCQ Physics Class 10 SampleDocumento25 pagineArundeep's ICSE MCQ Physics Class 10 SampleOneof Yourbrother75% (8)
- Ryton PPS Design GuideDocumento24 pagineRyton PPS Design GuideAnonymous l2sT4aENessuna valutazione finora
- Design of Beam To Column SpliceDocumento1 paginaDesign of Beam To Column SpliceAndro RebuyasNessuna valutazione finora
- Due To The Relatively Low CH4 Percentage in Biogas Around 50Documento12 pagineDue To The Relatively Low CH4 Percentage in Biogas Around 50Jane PondulanNessuna valutazione finora
- Multiphase - Pumps - Axel CalgaryDocumento45 pagineMultiphase - Pumps - Axel CalgaryAlberto Enrique De Santa Anna CampderáNessuna valutazione finora
- Lighting Calculation 8Documento1 paginaLighting Calculation 8Hansika RajapakshaNessuna valutazione finora
- 1 s2.0 S0038080620315845 MainDocumento10 pagine1 s2.0 S0038080620315845 MainAlexis FaureNessuna valutazione finora
- Gear SystemDocumento57 pagineGear SystemWilson LimNessuna valutazione finora
- Di Bella Et Al 2004Documento13 pagineDi Bella Et Al 2004Emilio Patané SpataroNessuna valutazione finora
- SR 2 MN O4Documento3 pagineSR 2 MN O4Gurudeo NiralaNessuna valutazione finora
- Practice Periodical Structural Design ConstructionDocumento4 paginePractice Periodical Structural Design ConstructionSen HuNessuna valutazione finora
- Chapter 4: Calculation: 4.1 Stress and Strain CalculationDocumento5 pagineChapter 4: Calculation: 4.1 Stress and Strain CalculationLai Swee YongNessuna valutazione finora
- COOLPLUS-Water Cooled Heat ExchangerDocumento10 pagineCOOLPLUS-Water Cooled Heat ExchangerCOOLPLUS OIL COOLERNessuna valutazione finora
- API 571 DemoDocumento14 pagineAPI 571 DemoRueda Joan100% (1)
- Latent Heat of VaporizationDocumento11 pagineLatent Heat of VaporizationEsther Faith GabrielNessuna valutazione finora
- 2.1 RaySafe Xi Classic Specifications en WebDocumento8 pagine2.1 RaySafe Xi Classic Specifications en WebCat-PerNessuna valutazione finora
- Definition and Purposes of ExplanationDocumento4 pagineDefinition and Purposes of ExplanationArka WiguaNessuna valutazione finora
- Cleaning, Flushing, and Purification of Petroleum Fluid Hydraulic SystemsDocumento11 pagineCleaning, Flushing, and Purification of Petroleum Fluid Hydraulic SystemsCarlos Tuyo100% (1)
- Asset Integrity Management for Offshore and Onshore StructuresDa EverandAsset Integrity Management for Offshore and Onshore StructuresNessuna valutazione finora
- Flow Analysis for Hydrocarbon Pipeline EngineeringDa EverandFlow Analysis for Hydrocarbon Pipeline EngineeringNessuna valutazione finora
- Practical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsDa EverandPractical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsValutazione: 5 su 5 stelle5/5 (1)
- Pocket Guide to Flanges, Fittings, and Piping DataDa EverandPocket Guide to Flanges, Fittings, and Piping DataValutazione: 3.5 su 5 stelle3.5/5 (22)
- Black Gold Stranglehold: The Myth of Scarcity and the Politics of OilDa EverandBlack Gold Stranglehold: The Myth of Scarcity and the Politics of OilNessuna valutazione finora
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionDa EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionValutazione: 4.5 su 5 stelle4.5/5 (16)
- Industrial Piping and Equipment Estimating ManualDa EverandIndustrial Piping and Equipment Estimating ManualValutazione: 5 su 5 stelle5/5 (7)
- Machinery Lubrication Technician (MLT) I and II Certification Exam GuideDa EverandMachinery Lubrication Technician (MLT) I and II Certification Exam GuideValutazione: 2 su 5 stelle2/5 (1)