Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Iphone App DevelopmentDocumento18 pagineIphone App DevelopmentVinay BharadwajNessuna valutazione finora
- Draw 224-1Documento8 pagineDraw 224-1Alther Dabon33% (3)
- Um0244 01 GBDocumento84 pagineUm0244 01 GBnetharafernando1Nessuna valutazione finora
- Traffic Management During Construction, RSA - 240608Documento104 pagineTraffic Management During Construction, RSA - 240608mrasdan100% (2)
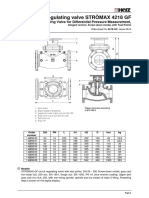
- Circuit Regulating Valve STRÖMAX 4218 GFDocumento14 pagineCircuit Regulating Valve STRÖMAX 4218 GFMario Mô Ri ANessuna valutazione finora
- Electrical Design Checklist v1.2Documento39 pagineElectrical Design Checklist v1.2huangjlNessuna valutazione finora
- 50 Practice Questions With Topics For IELTS Speaking Part 3Documento5 pagine50 Practice Questions With Topics For IELTS Speaking Part 3Adeel Raza SyedNessuna valutazione finora
- AC 29 2cincorporatedDocumento1.109 pagineAC 29 2cincorporatedzzudhirNessuna valutazione finora
- PAC4200 Product GuideDocumento4 paginePAC4200 Product GuideHugo Alberto Malespin SolisNessuna valutazione finora
- HPB Install Manual ABB - Distribution BUS BarsDocumento11 pagineHPB Install Manual ABB - Distribution BUS BarsArunallNessuna valutazione finora
- Ecen 607 CMFB-2011Documento44 pagineEcen 607 CMFB-2011Girish K NathNessuna valutazione finora
- 3600 2 TX All Rounder Rotary Brochure India enDocumento2 pagine3600 2 TX All Rounder Rotary Brochure India ensaravananknpcNessuna valutazione finora
- For Calibration List - OrginalDocumento62 pagineFor Calibration List - Orginaluttam khatriNessuna valutazione finora
- Plug Design Case StudyDocumento24 paginePlug Design Case StudyAnonymous EsZwKlnBNessuna valutazione finora
- ALV List and ALV GridDocumento6 pagineALV List and ALV Gridlavi2Nessuna valutazione finora
- O21350 CMMKKDocumento2 pagineO21350 CMMKKwade.hynesoutlook.comNessuna valutazione finora
- JFo 2 1 PDFDocumento45 pagineJFo 2 1 PDFAkbar WisnuNessuna valutazione finora
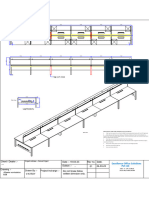
- 6seater Workstation B2BDocumento1 pagina6seater Workstation B2BDid ProjectsNessuna valutazione finora
- Deped SipagDocumento23 pagineDeped Sipagwilliam felisilda100% (1)
- Unit 9 Computer NetworksDocumento8 pagineUnit 9 Computer NetworksDaniel BellNessuna valutazione finora
- Re InviteDocumento16 pagineRe InviteAjay WaliaNessuna valutazione finora
- TechTrax 09 2003 ScreenReaderVersionDocumento84 pagineTechTrax 09 2003 ScreenReaderVersionMCKINNONBNessuna valutazione finora
- Oracle9i Database Installation Guide Release 2 (9.2.0.1.0) For WindowsDocumento274 pagineOracle9i Database Installation Guide Release 2 (9.2.0.1.0) For WindowsrameshkadamNessuna valutazione finora
- Ac-Dc KilnsDocumento10 pagineAc-Dc KilnsPrateek SinghNessuna valutazione finora
- Microsoft Word - CHALLAN DHSK - 5th - Sem - Challan - 22-23Documento1 paginaMicrosoft Word - CHALLAN DHSK - 5th - Sem - Challan - 22-23YoUnG PrINCeNessuna valutazione finora
- Unit - 1: (B) Difference Between Thermodynamcis and Heat TransferDocumento66 pagineUnit - 1: (B) Difference Between Thermodynamcis and Heat TransferSayyadh Rahamath Baba100% (1)
- 7.sieve Analysis AhmedDocumento9 pagine7.sieve Analysis AhmedJin AhmedNessuna valutazione finora
- VCEguide 300-360Documento25 pagineVCEguide 300-360olam batorNessuna valutazione finora
- Rajiv Verma CVDocumento3 pagineRajiv Verma CVrajivNessuna valutazione finora
- Seminar ReportDocumento27 pagineSeminar ReportnitinNessuna valutazione finora