Potrebbero piacerti anche
- Torsional Vibration Problem in Reciprocating Compressor - Case StudyDocumento11 pagineTorsional Vibration Problem in Reciprocating Compressor - Case Studysandeep@homeNessuna valutazione finora
- Dynamic Analysis of Gear and Rack Transmission SysDocumento6 pagineDynamic Analysis of Gear and Rack Transmission SysEverest Engineering Lead R&DNessuna valutazione finora
- A Novel Control Approach For A Thrust Vector System With An Electromechanical ActuatorDocumento9 pagineA Novel Control Approach For A Thrust Vector System With An Electromechanical ActuatorVũ Kiên CNessuna valutazione finora
- Ivo Senjanović, N Even Hadžić, Lech Murawski, Nikola Vladimir, Neven AlujevićDocumento39 pagineIvo Senjanović, N Even Hadžić, Lech Murawski, Nikola Vladimir, Neven AlujevićparvejNessuna valutazione finora
- Response Analysis of A Dual-Disc Rotor System With Multi-Unbalances-Multi-Fixed-Point Rubbing FaultsDocumento17 pagineResponse Analysis of A Dual-Disc Rotor System With Multi-Unbalances-Multi-Fixed-Point Rubbing FaultsSandeep186Nessuna valutazione finora
- Analysis of Electro-Hydraulic Proportional Speed CDocumento9 pagineAnalysis of Electro-Hydraulic Proportional Speed CEduardo RibeiroNessuna valutazione finora
- Kinematic of Marine Piston-Crankshaft System: Lech MurawskiDocumento8 pagineKinematic of Marine Piston-Crankshaft System: Lech MurawskiCojocaru TiberiuNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- AC - Motor PracDocumento9 pagineAC - Motor PracK PranavNessuna valutazione finora
- Stress Analysis and Weight Reduction of A One-CyliDocumento18 pagineStress Analysis and Weight Reduction of A One-CyliAnonymous K3FaYFlNessuna valutazione finora
- Operating Energy E Ciency of Automatically Controlled CranesDocumento8 pagineOperating Energy E Ciency of Automatically Controlled CranesAhmed YehiaNessuna valutazione finora
- ME6401-Kinematics of MachineryDocumento8 pagineME6401-Kinematics of MachineryKrishnaraj VenugopalNessuna valutazione finora
- 351 - 27435 - EE418 - 2015 - 1 - 1 - 1 - 10 Lec10 EE418 DC Motor Control PDFDocumento21 pagine351 - 27435 - EE418 - 2015 - 1 - 1 - 1 - 10 Lec10 EE418 DC Motor Control PDFفحرلرز دیمسNessuna valutazione finora
- 10 1016@j Energy 2017 04 154Documento32 pagine10 1016@j Energy 2017 04 154Edgard Marroquin ColqueNessuna valutazione finora
- Design and Analysis Trends of Helicopter Rotor SystemsDocumento40 pagineDesign and Analysis Trends of Helicopter Rotor SystemsHasan ÖzgenNessuna valutazione finora
- Traction Induction Drive For Railway CHUEV DenisDocumento9 pagineTraction Induction Drive For Railway CHUEV DenisPABLO MAURONessuna valutazione finora
- Identification of Weighted Additive Stiffness Coefficients in Coupled Jeffcott Rotors Integrated With AMB in The Presence of Angular MisalignmentDocumento12 pagineIdentification of Weighted Additive Stiffness Coefficients in Coupled Jeffcott Rotors Integrated With AMB in The Presence of Angular MisalignmentSivaRSNessuna valutazione finora
- Study On Torsional Stiffness of Engine CrankshaftDocumento5 pagineStudy On Torsional Stiffness of Engine CrankshaftBestin VargheseNessuna valutazione finora
- Main ShaftDocumento7 pagineMain Shaftcosta59dac9242Nessuna valutazione finora
- Chapter15 SSR Kundur PDFDocumento47 pagineChapter15 SSR Kundur PDFnghĩa võ đăng đoànNessuna valutazione finora
- Taking Up A Characteristic of A Centrifugal Compressor With An Adjustable Inlet Guide GridDocumento21 pagineTaking Up A Characteristic of A Centrifugal Compressor With An Adjustable Inlet Guide GridJIGAR SURA100% (3)
- Handbook of Power Systems Engineering with Power Electronics ApplicationsDa EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNessuna valutazione finora
- 7 - Lecture - Induction MotorsDocumento41 pagine7 - Lecture - Induction MotorspaurushgodharNessuna valutazione finora
- RENGJ Volume 17 Issue 5 Pages 1 14Documento14 pagineRENGJ Volume 17 Issue 5 Pages 1 14Khang TruongNessuna valutazione finora
- FinalPaper IGTC 2015 No131Documento10 pagineFinalPaper IGTC 2015 No131Asim HafizovicNessuna valutazione finora
- Position Sensor Based Torque ControlDocumento4 paginePosition Sensor Based Torque ControlChandrajit GangulyNessuna valutazione finora
- Chen 2005Documento11 pagineChen 2005Muhammad UsamaNessuna valutazione finora
- Zhangxingyuan 2010Documento3 pagineZhangxingyuan 2010satish lukkaNessuna valutazione finora
- A Model Establishment and Numerical Simulation of Dynamic Coupled Hydraulic-Mechanical-Electric-Structural System For Hydropower StationDocumento16 pagineA Model Establishment and Numerical Simulation of Dynamic Coupled Hydraulic-Mechanical-Electric-Structural System For Hydropower StationElio RiachiNessuna valutazione finora
- SMiRT 25 Paper Dynamic Model - DubykDocumento10 pagineSMiRT 25 Paper Dynamic Model - DubykTopNameNessuna valutazione finora
- DDM - Mechatronics - Project 1Documento3 pagineDDM - Mechatronics - Project 1MuntoiaNessuna valutazione finora
- Mechanisms Geneva: How To DesignDocumento5 pagineMechanisms Geneva: How To DesignAseel JameelNessuna valutazione finora
- 1997 pachterQFTDocumento18 pagine1997 pachterQFTCumhur ÖzbaşNessuna valutazione finora
- Coordinated Control of Downshift Powertrain of ComDocumento4 pagineCoordinated Control of Downshift Powertrain of Commuhammet fidanNessuna valutazione finora
- A Method For Evaluation of The Chain Drive EfficiencyDocumento6 pagineA Method For Evaluation of The Chain Drive EfficiencyКонстантин ЛеманNessuna valutazione finora
- Torque Control Based Speed Synchronization For Two-Speed Gear Electric VehicleDocumento10 pagineTorque Control Based Speed Synchronization For Two-Speed Gear Electric Vehicleu2005044Nessuna valutazione finora
- Analysis of The Power Transmission Characteristics of A Metal V-Belt Type CVTDocumento8 pagineAnalysis of The Power Transmission Characteristics of A Metal V-Belt Type CVTReza FbriadiNessuna valutazione finora
- Optimization Method For The Design of Axial Hydraulic TurbinesDocumento8 pagineOptimization Method For The Design of Axial Hydraulic TurbinesЖивотаЛазаревићNessuna valutazione finora
- An Improved Method Damping Generator Oscillations: of ofDocumento6 pagineAn Improved Method Damping Generator Oscillations: of ofPrasanna DharmapriyaNessuna valutazione finora
- Shaft Misalignment and Vibration - A ModelDocumento13 pagineShaft Misalignment and Vibration - A ModelPeak NeoNessuna valutazione finora
- Digital Simulation of Field Oriented Control Using ANSIM Program, 1996.Documento4 pagineDigital Simulation of Field Oriented Control Using ANSIM Program, 1996.Ali H. NumanNessuna valutazione finora
- Gregov Siminiati COMPUTERSIMULATIONOFALABORATORYHYDRAULICSYSTEMWITHMATLAB-SIMULINKDocumento8 pagineGregov Siminiati COMPUTERSIMULATIONOFALABORATORYHYDRAULICSYSTEMWITHMATLAB-SIMULINKNavneetNessuna valutazione finora
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocumento13 pagineModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseNessuna valutazione finora
- Construction of Generator Construction of Generator CAA TC S CAA TC S Capability Curves Capability CurvesDocumento25 pagineConstruction of Generator Construction of Generator CAA TC S CAA TC S Capability Curves Capability CurvesPradeep RajasekeranNessuna valutazione finora
- National Advisory Committee For AeronauticsDocumento26 pagineNational Advisory Committee For Aeronauticscepheid_luNessuna valutazione finora
- Analyses of Dynamic Response of Vehicle and Track Coupling System With Random Irregularity of Track Vertical ProfileDocumento19 pagineAnalyses of Dynamic Response of Vehicle and Track Coupling System With Random Irregularity of Track Vertical ProfileHemanth C KNessuna valutazione finora
- Research Article: Nonlinear Dynamic Model-Based Adaptive Control of A Solenoid-Valve SystemDocumento14 pagineResearch Article: Nonlinear Dynamic Model-Based Adaptive Control of A Solenoid-Valve SystemArrow96Nessuna valutazione finora
- Ref 21Documento7 pagineRef 21mssmsNessuna valutazione finora
- PID Controller Optimization by GA and Its Performances On The Electro-Hydraulic Servo Control SystemDocumento7 paginePID Controller Optimization by GA and Its Performances On The Electro-Hydraulic Servo Control SystemArgaardNessuna valutazione finora
- A New Ac Motor Control StrategyDocumento6 pagineA New Ac Motor Control Strategyzy lNessuna valutazione finora
- Turbomachinery Part4 Turbocompressors Axial v1Documento15 pagineTurbomachinery Part4 Turbocompressors Axial v1Sami SaleemNessuna valutazione finora
- Study of The Delivery Ratio Characteristics of Cran Kcase-Scavenged Two-Stroke Cycle EnginesDocumento29 pagineStudy of The Delivery Ratio Characteristics of Cran Kcase-Scavenged Two-Stroke Cycle EnginesGombosTamásNessuna valutazione finora
- Pump Turbine Characteristics For Analysis of Unsteady FlowsDocumento12 paginePump Turbine Characteristics For Analysis of Unsteady FlowsRondonjrsNessuna valutazione finora
- Allsop Popelinsky 2Documento10 pagineAllsop Popelinsky 2eventnowNessuna valutazione finora
- Sizing and Performance of Safety Valve Relief Systems For Two-Phase FlowDocumento56 pagineSizing and Performance of Safety Valve Relief Systems For Two-Phase FlowAGP100% (1)
- 387 BaruDocumento17 pagine387 BaruPhillip MillerNessuna valutazione finora
- Internal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsDa EverandInternal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsNessuna valutazione finora
- Modern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlDa EverandModern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlNessuna valutazione finora
- A3 Pricelist 2023Documento2 pagineA3 Pricelist 2023LePainNessuna valutazione finora
- Parts Manual 7042 Series 2 ESM - Form 6311-2 (2016)Documento180 pagineParts Manual 7042 Series 2 ESM - Form 6311-2 (2016)dfmolina100% (1)
- Manual de Instrucciones Yamaha Grizzly 700ccDocumento93 pagineManual de Instrucciones Yamaha Grizzly 700ccMaria Nencheva NenchevaNessuna valutazione finora
- GM STG 16015 05 1C 1987 The 6 2 Liter Diesel EngineDocumento386 pagineGM STG 16015 05 1C 1987 The 6 2 Liter Diesel EngineTyler Kramka100% (1)
- 2010 08 8 Speed Automatic Gearbox PDFDocumento22 pagine2010 08 8 Speed Automatic Gearbox PDFJOHNNY5377Nessuna valutazione finora
- Types: Piston Rings Cylinder Liners/finned Cylinders AssemblyDocumento3 pagineTypes: Piston Rings Cylinder Liners/finned Cylinders Assemblyeng_ebrahim_20000% (1)
- Lycoming IO-540 Operators ManualDocumento69 pagineLycoming IO-540 Operators ManualMichael Klotz86% (7)
- Nike Store. Cart.Documento10 pagineNike Store. Cart.Héctor Baz VicenteNessuna valutazione finora
- Frane Shimano Cursiera EV-BR-4700-3865ADocumento1 paginaFrane Shimano Cursiera EV-BR-4700-3865Afphvac01Nessuna valutazione finora
- X1.3 Final Part Book 261009 - PRINT PDFDocumento72 pagineX1.3 Final Part Book 261009 - PRINT PDFNAVANEETH100% (1)
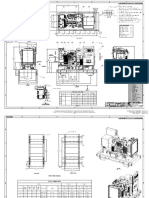
- A053s659 Outline, Genset (Open Genset With Standard Skid)Documento3 pagineA053s659 Outline, Genset (Open Genset With Standard Skid)thainarimeNessuna valutazione finora
- Continental IO 520 Manual PDFDocumento96 pagineContinental IO 520 Manual PDFJose100% (1)
- Service Manual A10 & A12 AADocumento2 pagineService Manual A10 & A12 AALuisNessuna valutazione finora
- Ohlins DTC Einbauanleitung BM 317 EnglischDocumento2 pagineOhlins DTC Einbauanleitung BM 317 Englischtututis7562Nessuna valutazione finora
- Iveco Daily Fault Codes List PDF 1 PDFDocumento3 pagineIveco Daily Fault Codes List PDF 1 PDFIonuț-Cătălin Frăsin100% (1)
- Development of EPA Tier 4 Certified Diesel Engines For 2-3t Forklift TrucksDocumento6 pagineDevelopment of EPA Tier 4 Certified Diesel Engines For 2-3t Forklift TrucksTien NguyenNessuna valutazione finora
- Template Upload Part AHASS SINAR JAYA UTAMADocumento680 pagineTemplate Upload Part AHASS SINAR JAYA UTAMAWulan KinayaNessuna valutazione finora
- Toyota Trouble CodesDocumento3 pagineToyota Trouble CodesgilchristkidNessuna valutazione finora
- 632Documento374 pagine632ccbulgaria100% (1)
- Top Overhaulling Materials of Diesel EngineDocumento5 pagineTop Overhaulling Materials of Diesel EngineMd.belal SharifNessuna valutazione finora
- Full Power For Start-Stop and All Consumer Units in The Car - S5 EFB and S6 AGM From BoschDocumento12 pagineFull Power For Start-Stop and All Consumer Units in The Car - S5 EFB and S6 AGM From BoschdekaNessuna valutazione finora
- DTC Toyota TrasmicionesDocumento20 pagineDTC Toyota Trasmicionesruben diazNessuna valutazione finora
- 3-Axle Steel Segment Tipper Semitrailer: Product BenefitsDocumento9 pagine3-Axle Steel Segment Tipper Semitrailer: Product BenefitsGorazdNessuna valutazione finora
- Case IH - 1896 2096 PDFDocumento115 pagineCase IH - 1896 2096 PDFtyler vanrossum100% (2)
- Aisin AW 450-43LE: Click On Part Numbers For Product Details or VisitDocumento1 paginaAisin AW 450-43LE: Click On Part Numbers For Product Details or VisitJohnnyLarsonNessuna valutazione finora
- Hangcha Serie R3.0-3.5tDocumento378 pagineHangcha Serie R3.0-3.5tKaynã Mello80% (5)
- LG250CDocumento2 pagineLG250CCarlosNessuna valutazione finora
- Hand Cranked EngineDocumento37 pagineHand Cranked EngineEngineering ProjectNessuna valutazione finora
- Existencia y Lista de Precios de UsadosDocumento6 pagineExistencia y Lista de Precios de UsadosabogadoNessuna valutazione finora