Potrebbero piacerti anche
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Da EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Nessuna valutazione finora
- A New Topology For Unipolar Brushless DC Motor DriveDocumento55 pagineA New Topology For Unipolar Brushless DC Motor Drivesrikaanth06Nessuna valutazione finora
- Ba-Thunya Ali, DKK, (2001) Single Phase Induction Motor Drives - A Literature SurveyDocumento6 pagineBa-Thunya Ali, DKK, (2001) Single Phase Induction Motor Drives - A Literature SurveyBustanul ArifienNessuna valutazione finora
- Modes of Operation of Stepper MotorDocumento17 pagineModes of Operation of Stepper MotorSoumik GhoshNessuna valutazione finora
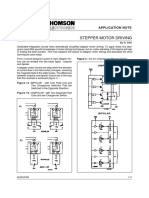
- Stepper Motor Driving: Application NoteDocumento17 pagineStepper Motor Driving: Application NoteGonzalo RiosNessuna valutazione finora
- Stepper Motor Driving: Application NoteDocumento17 pagineStepper Motor Driving: Application NoteGonzalo RiosNessuna valutazione finora
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocumento18 pagineCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNessuna valutazione finora
- A Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueDocumento56 pagineA Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueVineetKumarNessuna valutazione finora
- Pulse: Modulated InvertersDocumento11 paginePulse: Modulated InvertersBrahmananda Reddy TeegalaNessuna valutazione finora
- Multilevel DC Link Inverter For Brushless Permanent Magnet Motors PDFDocumento6 pagineMultilevel DC Link Inverter For Brushless Permanent Magnet Motors PDFAnonymous JyKrXZDXLGNessuna valutazione finora
- PFC DC-DCDocumento8 paginePFC DC-DCmanda RamuNessuna valutazione finora
- Reduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterDocumento6 pagineReduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterRahardian TristantoNessuna valutazione finora
- 00878876Documento6 pagine00878876jazzdeepakNessuna valutazione finora
- Paper 15Documento13 paginePaper 15RakeshconclaveNessuna valutazione finora
- Design of EV Charger With Cuk Converter To Improve Power QualityDocumento5 pagineDesign of EV Charger With Cuk Converter To Improve Power QualitydikochchNessuna valutazione finora
- Zero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellsDocumento8 pagineZero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellssghfqweNessuna valutazione finora
- Ieee AbstractsDocumento5 pagineIeee AbstractsNaga RjunNessuna valutazione finora
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocumento6 pagineResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNessuna valutazione finora
- A Unity Power Factor Converter Using HalfDocumento14 pagineA Unity Power Factor Converter Using HalfLivia Faria PeresNessuna valutazione finora
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDocumento5 pagineBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaNessuna valutazione finora
- v42 63Documento5 paginev42 63Bala KumarNessuna valutazione finora
- IJETR031989Documento5 pagineIJETR031989erpublicationNessuna valutazione finora
- Ijet V2i2p17Documento9 pagineIjet V2i2p17International Journal of Engineering and TechniquesNessuna valutazione finora
- A Fuzzy Based Single-Stage PFC Half-Bridge Converter For Voltage Controlled Adjustable Speed PMBLDCM DriveDocumento8 pagineA Fuzzy Based Single-Stage PFC Half-Bridge Converter For Voltage Controlled Adjustable Speed PMBLDCM DrivePraful YadavNessuna valutazione finora
- Torque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterDocumento5 pagineTorque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterShiju RamachandranNessuna valutazione finora
- Limitations of The Conventional Phase Advance Method For ConstanDocumento7 pagineLimitations of The Conventional Phase Advance Method For ConstanAshish KushwahaNessuna valutazione finora
- 1 PDFDocumento8 pagine1 PDFB.Kailash Krishna PrasadNessuna valutazione finora
- 358 2132 1 PBDocumento7 pagine358 2132 1 PBM UMAR ABBASINessuna valutazione finora
- Topic Assignment14Documento6 pagineTopic Assignment14cuongakamarineNessuna valutazione finora
- 486 N20038 PDFDocumento6 pagine486 N20038 PDFguddu13481Nessuna valutazione finora
- A Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM StrategyDocumento2 pagineA Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM Strategyskumar_61719Nessuna valutazione finora
- D S Henderson Napier University, UK.: Variable Speed Electric Drives - Characteristics and ApplicationsDocumento8 pagineD S Henderson Napier University, UK.: Variable Speed Electric Drives - Characteristics and ApplicationsscrsanNessuna valutazione finora
- A Buck-Boost Common-Mode Transformerless Inverter For Photovoltaic ApplicationsDocumento5 pagineA Buck-Boost Common-Mode Transformerless Inverter For Photovoltaic ApplicationsIndra PratamaNessuna valutazione finora
- Self-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionDocumento11 pagineSelf-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionJie99Nessuna valutazione finora
- 1-MHz Self-Driven ZVS Full-Bridge Converter For 48-V Power Pod and DC-DC BrickDocumento10 pagine1-MHz Self-Driven ZVS Full-Bridge Converter For 48-V Power Pod and DC-DC Brick李漢祥Nessuna valutazione finora
- A DCM Three-Phase High Frequency Semi-Controlled Rectifier Feasible For Low Power WECS Based On A Permanent Magnet GeneratorDocumento6 pagineA DCM Three-Phase High Frequency Semi-Controlled Rectifier Feasible For Low Power WECS Based On A Permanent Magnet GeneratorIzabel VieiraNessuna valutazione finora
- Jacob 2016Documento7 pagineJacob 2016TrơNhưNitơNessuna valutazione finora
- Singh 2006Documento10 pagineSingh 2006martin.teruelNessuna valutazione finora
- Chow 98 NovelDocumento9 pagineChow 98 NovelbmmostefaNessuna valutazione finora
- A Novel CSI-Fed Induction Motor Drive: Abdul Rahiman Beig, Member, IEEE, and V. T. Ranganathan, Senior Member, IEEEDocumento10 pagineA Novel CSI-Fed Induction Motor Drive: Abdul Rahiman Beig, Member, IEEE, and V. T. Ranganathan, Senior Member, IEEEishtiyqueNessuna valutazione finora
- A Low Cost Flyback CCM Inverter For AC Module ApplicationDocumento9 pagineA Low Cost Flyback CCM Inverter For AC Module Applicationvinay kumarNessuna valutazione finora
- Grid Interface of Wind PowerDocumento34 pagineGrid Interface of Wind PowerM Paul PrasadNessuna valutazione finora
- Single Phase To Three Phase ConverterDocumento5 pagineSingle Phase To Three Phase ConverterGabriel MejiaNessuna valutazione finora
- Control of DC Drive by Bridgeless PFC Boost TopologyDocumento3 pagineControl of DC Drive by Bridgeless PFC Boost TopologyDivya ShriNessuna valutazione finora
- Electric PropulsionDocumento6 pagineElectric PropulsionSiva ForeviewNessuna valutazione finora
- An Improved Battery Charger For Electric VehicleDocumento8 pagineAn Improved Battery Charger For Electric VehicleSanyog Jayant PohareNessuna valutazione finora
- Matteini PHD Part1Documento15 pagineMatteini PHD Part1Anonymous EnggrUsmNessuna valutazione finora
- Regenerative Hybrid Automobile ReportDocumento67 pagineRegenerative Hybrid Automobile ReportRajat KapoorNessuna valutazione finora
- ProjectDocumento30 pagineProjectmitesh goyal100% (1)
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocumento6 pagineFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNessuna valutazione finora
- Reactive Power Compensation Using Induction Motor Driven by Nine Switch AC-DC-AC ConverterDocumento9 pagineReactive Power Compensation Using Induction Motor Driven by Nine Switch AC-DC-AC ConverterThabet Abd ElghanyNessuna valutazione finora
- IEEE POWER ELECTRONICS 2015 Matlab Projectlist Mtech BeDocumento4 pagineIEEE POWER ELECTRONICS 2015 Matlab Projectlist Mtech BeKumar RajNessuna valutazione finora
- Bridgetopology 72 400Documento8 pagineBridgetopology 72 400sravaniNessuna valutazione finora
- ANPC-5L Technology Applied To Medium Voltage Variable Speed Drives ApplicationsDocumento8 pagineANPC-5L Technology Applied To Medium Voltage Variable Speed Drives ApplicationsRen Hong GiangNessuna valutazione finora
- Commutation Torque Ripple Reduction in Brushless DC Motor Using Modified SEPIC ConverterDocumento6 pagineCommutation Torque Ripple Reduction in Brushless DC Motor Using Modified SEPIC ConverterSrinath VelavanNessuna valutazione finora
- Paper 2002Documento12 paginePaper 2002Miguel VenzNessuna valutazione finora
- 24 Pulse Polygon Connected Auto TransformerDocumento12 pagine24 Pulse Polygon Connected Auto TransformerMustafizur RahmanNessuna valutazione finora
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Ry,"j: R,:" " ': - A Seil Is DD U A6e "Documento24 pagineRy,"j: R,:" " ': - A Seil Is DD U A6e "Ragunathan NarayananNessuna valutazione finora
- Hybrid Energy Storage System For Electric Vehicle Using Ultra CapacitorDocumento6 pagineHybrid Energy Storage System For Electric Vehicle Using Ultra CapacitorRagunathan NarayananNessuna valutazione finora
- Mookambigai College of Engineering Periodical Test - IiDocumento1 paginaMookambigai College of Engineering Periodical Test - IiRagunathan NarayananNessuna valutazione finora
- Valliammai Engineering CollegeDocumento11 pagineValliammai Engineering CollegeRagunathan NarayananNessuna valutazione finora
- Raghunathan GBDocumento3 pagineRaghunathan GBRagunathan NarayananNessuna valutazione finora
- Design of DC-DC Boost Converts Based On 3Ssc and 5 VMCDocumento9 pagineDesign of DC-DC Boost Converts Based On 3Ssc and 5 VMCRagunathan NarayananNessuna valutazione finora
- Mobile: +91 9245560892 Objective: N.RaghunathanDocumento3 pagineMobile: +91 9245560892 Objective: N.RaghunathanRagunathan NarayananNessuna valutazione finora
- Contact DetailsDocumento4 pagineContact DetailsRagunathan NarayananNessuna valutazione finora
- f0Documento53 paginef0Ragunathan Narayanan100% (1)
- Coupled Inductor Based Current-Fed Switched Inverter For Low Voltage Renewable InterfaceDocumento3 pagineCoupled Inductor Based Current-Fed Switched Inverter For Low Voltage Renewable InterfaceRagunathan NarayananNessuna valutazione finora
- LAB To FRDocumento1 paginaLAB To FRRagunathan NarayananNessuna valutazione finora
- Sri Ksnchi Kamakotipeetam Jagadguru Vidyasthanam 67, North Street, Thiruvanaikoil, Tiruchirappalli-620005Documento1 paginaSri Ksnchi Kamakotipeetam Jagadguru Vidyasthanam 67, North Street, Thiruvanaikoil, Tiruchirappalli-620005Ragunathan NarayananNessuna valutazione finora
- Ee6010-High Voltage Direct CurrentDocumento9 pagineEe6010-High Voltage Direct CurrentRagunathan NarayananNessuna valutazione finora
- Raghunathan 14.11.2016Documento3 pagineRaghunathan 14.11.2016Ragunathan NarayananNessuna valutazione finora
- 15175fs Marking SMD CodeDocumento8 pagine15175fs Marking SMD Code2dmsNessuna valutazione finora
- Engineering Practice Lab Manual (Electrical and Electronics)Documento55 pagineEngineering Practice Lab Manual (Electrical and Electronics)Maheswaran Umaiyorupagan70% (10)
- Analog and RF Filters Design Manual:: A Filter Design Guide by and For WMU StudentsDocumento42 pagineAnalog and RF Filters Design Manual:: A Filter Design Guide by and For WMU StudentsThevesteNessuna valutazione finora
- Datasheet 5Documento16 pagineDatasheet 5tamphieuluukyNessuna valutazione finora
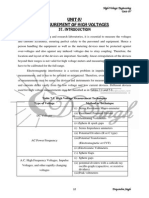
- UNIT-4 of HVEDocumento18 pagineUNIT-4 of HVEAayush PatidarNessuna valutazione finora
- 04product Download PDF DCDC Rdd05Documento4 pagine04product Download PDF DCDC Rdd05tilitronNessuna valutazione finora
- SMART Transmitter Power Supply KCD2-STC-Ex1: FunctionDocumento6 pagineSMART Transmitter Power Supply KCD2-STC-Ex1: FunctionVikaas JainNessuna valutazione finora
- EEEN40197 Lecture Notes AJF PDFDocumento46 pagineEEEN40197 Lecture Notes AJF PDFAnonymous gVhwdk9ui9Nessuna valutazione finora
- TDK CC e Apl eDocumento5 pagineTDK CC e Apl eJL StoriesNessuna valutazione finora
- 18-21-23 MHZ MHADocumento4 pagine18-21-23 MHZ MHAZain HamidNessuna valutazione finora
- Buck Converter Notes-1Documento10 pagineBuck Converter Notes-1Hafeex ShuaibuNessuna valutazione finora
- Liang 2019Documento7 pagineLiang 2019mahesh babuNessuna valutazione finora
- TPS 54386 (Texas Instruments)Documento56 pagineTPS 54386 (Texas Instruments)karkeraNessuna valutazione finora
- Ece I Basic Electronics Engg. (15eln15) NotesDocumento124 pagineEce I Basic Electronics Engg. (15eln15) NotesNikhil KulkarniNessuna valutazione finora
- State Space Model of Grid Connected Inverters Under Current Control ModeDocumento10 pagineState Space Model of Grid Connected Inverters Under Current Control Modeoussama sadkiNessuna valutazione finora
- Adaptive Control Strategy For VSC-Based Systems PDFDocumento9 pagineAdaptive Control Strategy For VSC-Based Systems PDFAisyahNessuna valutazione finora
- Ece 321 Lecture RevDocumento158 pagineEce 321 Lecture RevPaolo TuazonNessuna valutazione finora
- Frequency GeneratorDocumento10 pagineFrequency Generator6208050% (1)
- 3X1W Led Driver Solution Using AP3766Documento18 pagine3X1W Led Driver Solution Using AP3766mvaral_42Nessuna valutazione finora
- MAX9867Documento55 pagineMAX9867megatornadoNessuna valutazione finora
- A Basic Introduction To Filters, Active, Passive, and Switched CapacitorDocumento22 pagineA Basic Introduction To Filters, Active, Passive, and Switched CapacitorheadupNessuna valutazione finora
- Tps 54231Documento31 pagineTps 54231pvickyNessuna valutazione finora
- A05c 0S 000060 - Aoz2261nqi 11Documento18 pagineA05c 0S 000060 - Aoz2261nqi 11Chiapin LeeNessuna valutazione finora
- Linear D.C. Power Supply Linear D.C. Power Supply: GPR-U Series GPR-H SeriesDocumento11 pagineLinear D.C. Power Supply Linear D.C. Power Supply: GPR-U Series GPR-H SeriesJose M PeresNessuna valutazione finora
- Electro Fishing Safety GuideDocumento197 pagineElectro Fishing Safety GuideSarod PaichayonritthaNessuna valutazione finora
- Power SupplyDocumento29 paginePower SupplyJaved MaralitNessuna valutazione finora
- LGP4750 13PL2 Power+supplyDocumento76 pagineLGP4750 13PL2 Power+supplyricwer100% (5)
- Answer The Following Questions: Question OneDocumento8 pagineAnswer The Following Questions: Question Onemohammed attallaNessuna valutazione finora
- EMI Innovations Texas InstrumentsDocumento18 pagineEMI Innovations Texas InstrumentsJUAN SEBASTIAN DIAZ BERDECIANessuna valutazione finora