Potrebbero piacerti anche
- Basic SOP DraftDocumento2 pagineBasic SOP DraftShubham KadamNessuna valutazione finora
- "Hydraulic Systems For Aircrafts: A Seminar Report OnDocumento2 pagine"Hydraulic Systems For Aircrafts: A Seminar Report OnShubham KadamNessuna valutazione finora
- Practical No 1Documento1 paginaPractical No 1Shubham KadamNessuna valutazione finora
- A Seminar On, ": Landing Gear Arrangement in Aircraft"Documento2 pagineA Seminar On, ": Landing Gear Arrangement in Aircraft"Shubham KadamNessuna valutazione finora
- SK - 20 Screw JackmodelDocumento1 paginaSK - 20 Screw JackmodelShubham KadamNessuna valutazione finora
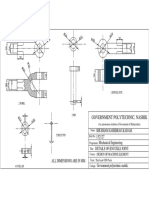
- Government Polytechnic Nashik Roll No. Akram Afzal Kadri Title: Details of Screw Jack 152128Documento1 paginaGovernment Polytechnic Nashik Roll No. Akram Afzal Kadri Title: Details of Screw Jack 152128Shubham KadamNessuna valutazione finora
- Mech Disc BrakesDocumento17 pagineMech Disc BrakesShubham Kadam0% (2)
- Cotter Joint 1502555073919-ModelDocumento1 paginaCotter Joint 1502555073919-ModelShubham KadamNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Priyanka MFT NIFTDocumento2 paginePriyanka MFT NIFTPriyanka JanaNessuna valutazione finora
- HRSG Handbook BrochureDocumento2 pagineHRSG Handbook Brochuremahmoud_allam3Nessuna valutazione finora
- Steering and Suspension BasicsDocumento57 pagineSteering and Suspension BasicsLuiz Gabriel Alves de DeusNessuna valutazione finora
- S-Mart Seal Material and Profile OverviewDocumento8 pagineS-Mart Seal Material and Profile OverviewTimon2005Nessuna valutazione finora
- Gianni Lettieri - Atitech Profile 2011Documento1 paginaGianni Lettieri - Atitech Profile 2011G LettieriNessuna valutazione finora
- Finish TG Eim Final 12-27-14Documento78 pagineFinish TG Eim Final 12-27-14Kit Galingan100% (3)
- PDFDocumento50 paginePDFJosé Ramón Villa BernalNessuna valutazione finora
- DT-PL-5223-2628-DT-16.03.2023 (TS-045-REV-01) CommentedDocumento16 pagineDT-PL-5223-2628-DT-16.03.2023 (TS-045-REV-01) Commentedhazem badawyNessuna valutazione finora
- Bako MotorsDocumento12 pagineBako MotorsEMNA KANZARINessuna valutazione finora
- Fire Departments - Safety Checklist For Fire Station Facility (Final)Documento2 pagineFire Departments - Safety Checklist For Fire Station Facility (Final)DAVE HOWARDNessuna valutazione finora
- ALCAN LABS BANBURY RecollectionsDocumento191 pagineALCAN LABS BANBURY RecollectionspermaxNessuna valutazione finora
- Operations Management: William J. StevensonDocumento16 pagineOperations Management: William J. StevensonaprianNessuna valutazione finora
- 04 KTS OverviewDocumento11 pagine04 KTS OverviewJayakumarNessuna valutazione finora
- ST11-16 Additional Error CodesDocumento4 pagineST11-16 Additional Error CodesvalterripNessuna valutazione finora
- The Dry Port ConceptDocumento103 pagineThe Dry Port ConceptCristian MarcialesNessuna valutazione finora
- Oracle AME Set Up Approval MangementDocumento17 pagineOracle AME Set Up Approval MangementRithy Tep Saly100% (1)
- P3 Summary ModelsDocumento4 pagineP3 Summary ModelsMahfuzah MjNessuna valutazione finora
- Legends: L-Lecture T - Tutorial/Teacher Guided Theory Practice P - Practical C - Credit, CADocumento7 pagineLegends: L-Lecture T - Tutorial/Teacher Guided Theory Practice P - Practical C - Credit, CAMohammed FaizNessuna valutazione finora
- Explain How in Modern Buildings BAS (Building Automation System) Can Help Integration of Various Services and Ease of Operation of These Services? (10 Marks)Documento3 pagineExplain How in Modern Buildings BAS (Building Automation System) Can Help Integration of Various Services and Ease of Operation of These Services? (10 Marks)Ruchira Anand PimpalkhuteNessuna valutazione finora
- Section 'H-H' Section 'J-J' Section 'L-L'Documento1 paginaSection 'H-H' Section 'J-J' Section 'L-L'Rakesh ReddyNessuna valutazione finora
- CV Dourhri Anouar - English - April 2012Documento2 pagineCV Dourhri Anouar - English - April 2012aanouar77Nessuna valutazione finora
- Chapter 9 MacroDocumento52 pagineChapter 9 MacroRusselle AdrianoNessuna valutazione finora
- BW Portal ImplementationDocumento58 pagineBW Portal ImplementationNarendra ChoudaryNessuna valutazione finora
- 2014.05.09 GN Jet Mud Mixer MaualDocumento17 pagine2014.05.09 GN Jet Mud Mixer MaualHamed GeramiNessuna valutazione finora
- SP CA MRK 006 R1 Swivelpole Catalogue PDFDocumento24 pagineSP CA MRK 006 R1 Swivelpole Catalogue PDFluciaNessuna valutazione finora
- System Dynamic Archetypes in Capacity Planning (Final)Documento12 pagineSystem Dynamic Archetypes in Capacity Planning (Final)Muhammad Rizki KresnawanNessuna valutazione finora
- Chemicals Zetag DATA Inverse Emulsions Magnafloc E 38 - 0410Documento2 pagineChemicals Zetag DATA Inverse Emulsions Magnafloc E 38 - 0410PromagEnviro.comNessuna valutazione finora
- HttpsDocumento17 pagineHttpsFjri NdaNessuna valutazione finora
- Distribution Channel of CSR Forging Pvt. Ltd.Documento33 pagineDistribution Channel of CSR Forging Pvt. Ltd.Dheeraj SinghalNessuna valutazione finora
- 17-10-23 Inhabit - Presentation Glass MakassarDocumento41 pagine17-10-23 Inhabit - Presentation Glass MakassarBINAZIRNessuna valutazione finora