Potrebbero piacerti anche
- Páginas Desde511255Documento1 paginaPáginas Desde511255Jhonatan QfNessuna valutazione finora
- Armado Trifasico de Fin de Linea Con Cadena: Sector Tipico: 2, 3, 4, 5Documento1 paginaArmado Trifasico de Fin de Linea Con Cadena: Sector Tipico: 2, 3, 4, 5Jhonatan QfNessuna valutazione finora
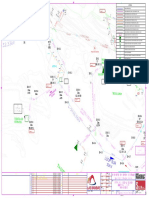
- Plano Linea 22.9 KV - Vista PlantaDocumento1 paginaPlano Linea 22.9 KV - Vista PlantaJhonatan QfNessuna valutazione finora
- Armado Bifasico de Anclaje Con Cadena: Sector Tipico: 2, 3, 4, 5Documento1 paginaArmado Bifasico de Anclaje Con Cadena: Sector Tipico: 2, 3, 4, 5Jhonatan QfNessuna valutazione finora
- Características Y Dimensiones de Los Transformadores de DistribuciónDocumento1 paginaCaracterísticas Y Dimensiones de Los Transformadores de DistribuciónJhonatan QfNessuna valutazione finora
- PPI Encofrados de ConcretoDocumento1 paginaPPI Encofrados de ConcretoJhonatan QfNessuna valutazione finora
- Formato de Ingrso y Salida de MaterialesDocumento2 pagineFormato de Ingrso y Salida de MaterialesJhonatan QfNessuna valutazione finora
- Organigrama Bryce PDFDocumento1 paginaOrganigrama Bryce PDFJhonatan QfNessuna valutazione finora
- FRADocumento3 pagineFRAJhonatan QfNessuna valutazione finora
- Hoja de Datos - FirmadaDocumento5 pagineHoja de Datos - FirmadaJhonatan QfNessuna valutazione finora
- Convolución de Secuencias de Duración Finita Por El Método de MallaDocumento2 pagineConvolución de Secuencias de Duración Finita Por El Método de MallaJhonatan QfNessuna valutazione finora
- Contenid 1Documento30 pagineContenid 1Jhonatan QfNessuna valutazione finora
- 1.5. Cidemat - Uis - Cap 3.9 - JCD PDFDocumento24 pagine1.5. Cidemat - Uis - Cap 3.9 - JCD PDFnancyNessuna valutazione finora
- Problema 9.6Documento5 pagineProblema 9.6Nan DiazNessuna valutazione finora
- Manual Excel Avanzado Ingenieros (Solver Examples)Documento105 pagineManual Excel Avanzado Ingenieros (Solver Examples)HumbertoEnriqueRamosCaicedoNessuna valutazione finora
- 10 Ejer CargasDocumento5 pagine10 Ejer CargasMarlon OñateNessuna valutazione finora
- La Filosofia de AristótelesDocumento39 pagineLa Filosofia de AristótelesluismartcoNessuna valutazione finora
- Vega Diana Examen 3Documento150 pagineVega Diana Examen 3Diana VegaNessuna valutazione finora
- Guia Teorias Fisicas I Trabajo y Energía 3Documento6 pagineGuia Teorias Fisicas I Trabajo y Energía 3Paula :vNessuna valutazione finora
- Parametro CaminoDocumento38 pagineParametro CaminoeliezerNessuna valutazione finora
- Fisica 1Documento187 pagineFisica 1Hugo Fabian RamirezNessuna valutazione finora
- 7.3 Keroseno y Aceite CrudoDocumento10 pagine7.3 Keroseno y Aceite CrudoIvoOne ParkerNessuna valutazione finora
- PerspectivasDocumento40 paginePerspectivasRosanaMastrandreaNessuna valutazione finora
- Investigacion de OperacionesDocumento8 pagineInvestigacion de OperacionesCristina Palacios SanchezNessuna valutazione finora
- Control Automático. Prácticas de LaboratorioDocumento5 pagineControl Automático. Prácticas de LaboratorioUniversidad del Norte Editorial100% (1)
- Guía 3° Grado Iii Momento PedagógicoDocumento23 pagineGuía 3° Grado Iii Momento PedagógicoEnriqueNessuna valutazione finora
- Guia 11Documento3 pagineGuia 11Fabiola Yessica CondoriNessuna valutazione finora
- Ejercicios Resueltos de Mecánica Newtoniana EPN - Ing. Edgar HaroDocumento138 pagineEjercicios Resueltos de Mecánica Newtoniana EPN - Ing. Edgar HaroKAGGHGNessuna valutazione finora
- Manual de LaboratorioDocumento12 pagineManual de LaboratorioBELÉN MILLARAY MARTINNessuna valutazione finora
- Matemática OctavosDocumento14 pagineMatemática OctavosCristian AstudilloNessuna valutazione finora
- Resultados Enadid18Documento26 pagineResultados Enadid18Anonymous Tujrd7Nessuna valutazione finora
- 1 Aritmetica 5°Documento27 pagine1 Aritmetica 5°UN0M4sNessuna valutazione finora
- Antecedentes Historicos de La Psicometria-1Documento10 pagineAntecedentes Historicos de La Psicometria-1Gutierrez MariaNessuna valutazione finora
- Lineamiento Curricular Liceo Soria Actualizaciones 2021Documento84 pagineLineamiento Curricular Liceo Soria Actualizaciones 2021Carlos Andres Barrera BarreraNessuna valutazione finora
- Guia de Trabajo Cuarto Basico DivisoresDocumento5 pagineGuia de Trabajo Cuarto Basico DivisoresCarmen Gloria Bravo GonzálezNessuna valutazione finora
- Guías de Matemáticas Tercer Periodo. 2020 (Recuperado Automáticamente)Documento19 pagineGuías de Matemáticas Tercer Periodo. 2020 (Recuperado Automáticamente)Liliana LindoNessuna valutazione finora
- Deber N-1Documento3 pagineDeber N-1STIVEN VALDIVIEZONessuna valutazione finora
- Cap VII - GujaratiDocumento19 pagineCap VII - GujaratiDagner lauraNessuna valutazione finora
- Conica CircunferenciaDocumento14 pagineConica CircunferenciaPATRICK JESUS CORDOVA GARATENessuna valutazione finora
- Distribuciones de ConteoDocumento37 pagineDistribuciones de ConteoAlejandro Martínez NavarroNessuna valutazione finora