Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- 161024154316Documento99 pagine161024154316Nam Anh TrầnNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- PSG Governor With Aluminum CaseDocumento98 paginePSG Governor With Aluminum CaseNam Anh TrầnNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
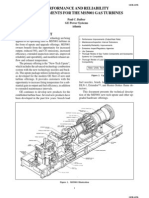
- Performance and Reliability Improvements For The Ms5001 Gas TurbinesDocumento39 paginePerformance and Reliability Improvements For The Ms5001 Gas TurbinesMuhammad Irfan AnwarNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Tuyen Tap Truyen Ngan Song Ngu Anh Viet HayDocumento10 pagineTuyen Tap Truyen Ngan Song Ngu Anh Viet HayKemTràXanhNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- 2301 Rev DDocumento148 pagine2301 Rev DRigoberto LozanoNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- s6rmptk PDFDocumento3 pagines6rmptk PDFZulkipli MarasabessyNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Yanmar Diesel Engine PDFDocumento240 pagineYanmar Diesel Engine PDFNam Anh Trần75% (8)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- CM20160713 53120 15686 PDFDocumento44 pagineCM20160713 53120 15686 PDFNam Anh Trần100% (1)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- 2015 Four Stroke Propulsion Engines PDFDocumento28 pagine2015 Four Stroke Propulsion Engines PDFNam Anh TrầnNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Man L2832a EngineDocumento5 pagineMan L2832a EngineNam Anh TrầnNessuna valutazione finora
- CM20160713 53120 36634 PDFDocumento64 pagineCM20160713 53120 36634 PDFNam Anh Trần100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- S90me C10-5Documento365 pagineS90me C10-5Nam Anh Trần100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- IEC 62271-111 - Edition 2.0 2012-09 - ReconectadorDocumento134 pagineIEC 62271-111 - Edition 2.0 2012-09 - ReconectadorAdolfo Falcón OlivasNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- 3 Transmission Line Modelling and PerformanceDocumento22 pagine3 Transmission Line Modelling and PerformanceDharamNessuna valutazione finora
- ESP K0380216-4111001183 MCO11 De-En DRUCKDocumento187 pagineESP K0380216-4111001183 MCO11 De-En DRUCKEdsonLuizPolesello100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Solar Pro Quick GuideDocumento16 pagineSolar Pro Quick GuideJaved KhanNessuna valutazione finora
- lm2940 NDocumento33 paginelm2940 NFly Jesus Yesca PrzNessuna valutazione finora
- Ocw1 3 (8259)Documento9 pagineOcw1 3 (8259)hemanthNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- PLC Report TimerDocumento5 paginePLC Report TimersadmanNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Control Systems Exam Specifications: NCEES Principles and Practice of Engineering ExaminationDocumento4 pagineControl Systems Exam Specifications: NCEES Principles and Practice of Engineering ExaminationAbdulslamNessuna valutazione finora
- FSN140019 eDocumento84 pagineFSN140019 etehnicancomNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Ip 6620Documento572 pagineIp 6620Carla AtienzaNessuna valutazione finora
- Sample Quiz4Documento4 pagineSample Quiz4safNessuna valutazione finora
- Design of Multiband Microstrip Patch Antenna For Wireless ApplicationDocumento3 pagineDesign of Multiband Microstrip Patch Antenna For Wireless ApplicationAnonymous CUPykm6DZNessuna valutazione finora
- Chapter 9: 8086/8088 Hardware SpecificationsDocumento105 pagineChapter 9: 8086/8088 Hardware Specificationssapna_eng4080Nessuna valutazione finora
- Prac1 For Egb120Documento10 paginePrac1 For Egb120Tam NguyenNessuna valutazione finora
- Logosol Supervisor I/O Controller CNC-SK-2310g2Documento24 pagineLogosol Supervisor I/O Controller CNC-SK-2310g2Ilhami DemirNessuna valutazione finora
- Parts Manual: Cornelius - Viper 4 FlavorDocumento16 pagineParts Manual: Cornelius - Viper 4 FlavorAndrewNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Ecu HW - Nissan ECU REDocumento15 pagineEcu HW - Nissan ECU RESameh ElmahdyNessuna valutazione finora
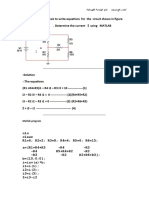
- R1 6Ω R4 4Ω R5 6Ω V1 10 VDocumento63 pagineR1 6Ω R4 4Ω R5 6Ω V1 10 Vď èNessuna valutazione finora
- PRT Simulation, Two, Three and Four Wire Connecction ReportDocumento6 paginePRT Simulation, Two, Three and Four Wire Connecction Reportميسرة80% (5)
- EN010101-000245-Document Ref 7.14 LC TA4.7 Outline Battery Safety Management PlanDocumento33 pagineEN010101-000245-Document Ref 7.14 LC TA4.7 Outline Battery Safety Management PlanSerg MarushkoNessuna valutazione finora
- 8259 PicDocumento6 pagine8259 PicpreethipattabiramanNessuna valutazione finora
- Rr410209 High Voltage EngineeringDocumento6 pagineRr410209 High Voltage EngineeringSrinivasa Rao GNessuna valutazione finora
- KA 70 - Users ManualDocumento32 pagineKA 70 - Users ManualNagy GabrielNessuna valutazione finora
- Technology and Development of 800 KV HVDC Applications: M. Haeusler H. Huang V. Ramaswami D. KumarDocumento12 pagineTechnology and Development of 800 KV HVDC Applications: M. Haeusler H. Huang V. Ramaswami D. KumarRatheesh KumarNessuna valutazione finora
- Capacitors and CapacitanceDocumento13 pagineCapacitors and CapacitanceCucu SohihudinNessuna valutazione finora
- 3-Phase Motor Drives W Oscilloscope 48W-73863-0Documento31 pagine3-Phase Motor Drives W Oscilloscope 48W-73863-0CarloNessuna valutazione finora
- 7 5 ConnectorsDocumento17 pagine7 5 ConnectorsRonal Quispe HuamanNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- QuadCopter FlightDocumento60 pagineQuadCopter Flightasso2412100% (1)
- Thesis For Electronics Engineering StudentDocumento7 pagineThesis For Electronics Engineering Studentjennysmithportland100% (2)