Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Bollhoff HeliCoil Plus Thread Repair KitsDocumento40 pagineBollhoff HeliCoil Plus Thread Repair KitsAce Industrial SuppliesNessuna valutazione finora
- Din Iso 965-1Documento21 pagineDin Iso 965-1Memo Gonzalez Aleman100% (1)
- Hitachi EX120 5 130K 5Documento279 pagineHitachi EX120 5 130K 5Yew Lim100% (7)
- Ballscrew (E)Documento213 pagineBallscrew (E)SerkanNessuna valutazione finora
- Unit I DME II Spur Gears by Sachin DhavaneDocumento63 pagineUnit I DME II Spur Gears by Sachin DhavaneSachiin Dhavane100% (1)
- Backlash For Planetary GearboxDocumento8 pagineBacklash For Planetary GearboxSerkanNessuna valutazione finora
- Content Inhalt Contenido Sisällysluettelo InnehållDocumento129 pagineContent Inhalt Contenido Sisällysluettelo InnehållLina JiaNessuna valutazione finora
- Fundamentals of GearsDocumento56 pagineFundamentals of GearsBigMace23Nessuna valutazione finora
- Calcolo Capacita Iso 6336 PDFDocumento7 pagineCalcolo Capacita Iso 6336 PDFmgualdiNessuna valutazione finora
- Rollvis 2013 enDocumento35 pagineRollvis 2013 enSerkanNessuna valutazione finora
- CSF Mini GearUnitsDocumento58 pagineCSF Mini GearUnitsSerkanNessuna valutazione finora
- 6b Wormgeardrives PDFDocumento98 pagine6b Wormgeardrives PDFSerkanNessuna valutazione finora
- Catalogue en HDDocumento69 pagineCatalogue en HDCCIISSNessuna valutazione finora
- MEM201 L6-Tolerance RCDocumento31 pagineMEM201 L6-Tolerance RCKaliya PerumalNessuna valutazione finora
- Vickers Loads PDFDocumento6 pagineVickers Loads PDFSerkanNessuna valutazione finora
- Aerospace GB enDocumento343 pagineAerospace GB enSerkanNessuna valutazione finora
- 06732G Chapter 4Documento10 pagine06732G Chapter 4SerkanNessuna valutazione finora
- Design & Fabrication of Eddy Current Braking System: International Research Journal of Engineering and Technology (IRJET)Documento7 pagineDesign & Fabrication of Eddy Current Braking System: International Research Journal of Engineering and Technology (IRJET)SerkanNessuna valutazione finora
- Torpedo PDFDocumento117 pagineTorpedo PDFSerkanNessuna valutazione finora
- Innovative Electro Magnetic Braking System PDFDocumento8 pagineInnovative Electro Magnetic Braking System PDFSerkanNessuna valutazione finora
- Development of The Electro-Magnetic Brake PDFDocumento8 pagineDevelopment of The Electro-Magnetic Brake PDFSerkanNessuna valutazione finora
- 690/700 Volt: Semiconductor Protection FusesDocumento1 pagina690/700 Volt: Semiconductor Protection FusesRafael lezoNessuna valutazione finora
- External Metric Thread Table Chart and Fastener Sizes M1Documento7 pagineExternal Metric Thread Table Chart and Fastener Sizes M1Susheel GuptaNessuna valutazione finora
- Bolts Gain Additional Strength Through The Use of A Nut or Washer As An AnchorDocumento3 pagineBolts Gain Additional Strength Through The Use of A Nut or Washer As An AnchorGeraldVirgilioAcusaNessuna valutazione finora
- BS 919-4-2007 Screw Gauge Limits and TolerancesDocumento70 pagineBS 919-4-2007 Screw Gauge Limits and TolerancesKhoinguyen NguyenNessuna valutazione finora
- Parts List: AstraluxDocumento22 pagineParts List: AstraluxAstraluxNessuna valutazione finora
- IS 1364 Part 5Documento6 pagineIS 1364 Part 5Jignesh TrivediNessuna valutazione finora
- Pegasus EX3200, 5200Documento117 paginePegasus EX3200, 5200Ninosca ValverdeNessuna valutazione finora
- C3002 - COLUMNA - Rev 0Documento1 paginaC3002 - COLUMNA - Rev 0MARIO PEÑA REYESNessuna valutazione finora
- Splined CouplingsDocumento1 paginaSplined CouplingsDark CenobiteNessuna valutazione finora
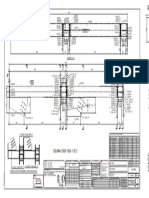
- SEMA MH Hook Block Assly. Sheet 1 3Documento1 paginaSEMA MH Hook Block Assly. Sheet 1 3Ade Y SaputraNessuna valutazione finora
- Makino C40 PartsDocumento31 pagineMakino C40 PartssunhuynhNessuna valutazione finora
- Simple MachineDocumento3 pagineSimple MachineMichiellaxieNessuna valutazione finora
- Include A Rubber Seal, Ductile Cup Washer and Self-Locking Hex Nut With Nylon InsertDocumento2 pagineInclude A Rubber Seal, Ductile Cup Washer and Self-Locking Hex Nut With Nylon InsertCarlos GustavoNessuna valutazione finora
- February '96: 710-19 CARRARO AXLE Ref. 126139 For "J.I. CASE" Spare Parts ListDocumento8 pagineFebruary '96: 710-19 CARRARO AXLE Ref. 126139 For "J.I. CASE" Spare Parts ListВенци ДимитровNessuna valutazione finora
- Synchromesh Gearbox - Construction, Working Principle, Advantages, Disadvantages, and Applications (PDF)Documento7 pagineSynchromesh Gearbox - Construction, Working Principle, Advantages, Disadvantages, and Applications (PDF)Kyle LabileNessuna valutazione finora
- Parts Manual Parts Manual Parts Manual Parts Manual: Mfg. No: 030426-0Documento19 pagineParts Manual Parts Manual Parts Manual Parts Manual: Mfg. No: 030426-0biggertvNessuna valutazione finora
- R3540-3009-B Hub AssemblyDocumento1 paginaR3540-3009-B Hub AssemblyKarikalan JayNessuna valutazione finora
- Design of Gear BoxDocumento26 pagineDesign of Gear BoxMKPashaPashaNessuna valutazione finora
- iCLPFA3 IDocumento132 pagineiCLPFA3 ICesar NietoNessuna valutazione finora
- 18Documento3 pagine18Adrian MandoleseNessuna valutazione finora
- HVFF270A Service ManualDocumento18 pagineHVFF270A Service ManualUEENessuna valutazione finora
- Unbrako New Price List Jan 2021 Hex PDFDocumento15 pagineUnbrako New Price List Jan 2021 Hex PDFManoj DoshiNessuna valutazione finora
- Sharp Sf7800p SMDocumento59 pagineSharp Sf7800p SMYO100% (1)
- Subcategory 39Documento8 pagineSubcategory 39Walter JosephNessuna valutazione finora