Potrebbero piacerti anche
- Tom MCQ VISemDocumento5 pagineTom MCQ VISempurukumar32250% (2)
- Mechanical Engineering Theory of Machines MCQsDocumento24 pagineMechanical Engineering Theory of Machines MCQsSAURABH KUMAR0% (1)
- 300+ TOP THEORY of MACHINES Questions and Answers PDFDocumento32 pagine300+ TOP THEORY of MACHINES Questions and Answers PDFkrishnaNessuna valutazione finora
- 154 Top Theory of Machines - Mechanical Engineering Multiple Choice Questions and AnswersDocumento26 pagine154 Top Theory of Machines - Mechanical Engineering Multiple Choice Questions and Answersahmish kabbaxeNessuna valutazione finora
- AE05 SolDocumento135 pagineAE05 SolVipul MahajanNessuna valutazione finora
- Thermodynamics Properties and ConceptsDocumento52 pagineThermodynamics Properties and ConceptsajayNessuna valutazione finora
- Gas Turbine MCQDocumento6 pagineGas Turbine MCQnimymech100% (1)
- 110 Top Most Transmission & DISTRIBUTION - Electrical Engineering Objective Type Questions and AnswersDocumento18 pagine110 Top Most Transmission & DISTRIBUTION - Electrical Engineering Objective Type Questions and AnswersRama Krishna LavooriNessuna valutazione finora
- Bec MCQDocumento16 pagineBec MCQJagadish Koundinye100% (1)
- IES - Electrical Engineering - Power ElectronicsDocumento35 pagineIES - Electrical Engineering - Power ElectronicsPiyush Chavan100% (1)
- Electrical Engr Mcqs PDFDocumento23 pagineElectrical Engr Mcqs PDFFarman100% (1)
- Basic Electrical EngineeringDocumento68 pagineBasic Electrical Engineeringahg#Nessuna valutazione finora
- 1875 Weekly Tech Quiz 126 28 12 19Documento8 pagine1875 Weekly Tech Quiz 126 28 12 19Sanjeev GoswamiNessuna valutazione finora
- MCQs On SCBDocumento9 pagineMCQs On SCBjigardesai100% (1)
- Rectifier and ConverterDocumento10 pagineRectifier and ConverterRaj PatelNessuna valutazione finora
- 123 TOP D.C. Motors - Electrical Engineering Multiple Choice Questions and AnswersDocumento23 pagine123 TOP D.C. Motors - Electrical Engineering Multiple Choice Questions and AnswersMellow crazyNessuna valutazione finora
- MIST MSC-ME SyllabusDocumento30 pagineMIST MSC-ME SyllabusSajidNessuna valutazione finora
- Power Plant Engineering BitsDocumento14 paginePower Plant Engineering BitsPavankumar PavankumarpvNessuna valutazione finora
- Power Plant Engineering MCQ Questions PDFDocumento31 paginePower Plant Engineering MCQ Questions PDFMzna AlshehhiNessuna valutazione finora
- Synchronous Motors Multiple ChoiceDocumento2 pagineSynchronous Motors Multiple ChoiceArturo Ramos AlvezoNessuna valutazione finora
- Mechanical Engineering-Compressors, Gas Turbines and Jet Engines Important MCQDocumento28 pagineMechanical Engineering-Compressors, Gas Turbines and Jet Engines Important MCQavantgarde bwoyNessuna valutazione finora
- Unit 2 - Automobile Suspension System: 1-Leaf Springs Absorb Shocks byDocumento5 pagineUnit 2 - Automobile Suspension System: 1-Leaf Springs Absorb Shocks byDipak ZopeNessuna valutazione finora
- 228 Top Compressors, Gas Turbines and Jet Engines - Mechanical Engineering Multiple Choice Questions and AnswersDocumento33 pagine228 Top Compressors, Gas Turbines and Jet Engines - Mechanical Engineering Multiple Choice Questions and Answersahmish kabbaxeNessuna valutazione finora
- DMM-2 Second Mid Bit PaperDocumento2 pagineDMM-2 Second Mid Bit PaperYeswanth Kumar ReddyNessuna valutazione finora
- Mechanical Technology - Comparators - Multiple Choice Questions and AnswersDocumento4 pagineMechanical Technology - Comparators - Multiple Choice Questions and Answerssimalaravi100% (1)
- ME 2354 Automobile Engineering 2009 6th Semester Anna UniversityDocumento2 pagineME 2354 Automobile Engineering 2009 6th Semester Anna UniversityParanthaman GanapathyNessuna valutazione finora
- Hydraulics Labs Test ReviewDocumento7 pagineHydraulics Labs Test ReviewJohn roland GarciaNessuna valutazione finora
- IES 2013 Electrical Engineering EE-objective Paper II Solved Question Paper PDFDocumento17 pagineIES 2013 Electrical Engineering EE-objective Paper II Solved Question Paper PDFkoinsuriNessuna valutazione finora
- Electrical Engineering Important Mcq-Transmission and DistributionDocumento16 pagineElectrical Engineering Important Mcq-Transmission and DistributionMohammed Abdalla MedaniNessuna valutazione finora
- PS IiDocumento20 paginePS Iiranga247100% (2)
- Measurement and Instrumentation Multiple Choice Questions and Answers Preparation For Competition Exams PDF - Preparation For EngineeringDocumento14 pagineMeasurement and Instrumentation Multiple Choice Questions and Answers Preparation For Competition Exams PDF - Preparation For EngineeringMahesh sNessuna valutazione finora
- Electrical Engineering Series SolutionsDocumento68 pagineElectrical Engineering Series SolutionsGanesh M SurangeNessuna valutazione finora
- Mechanical Engineering-Fluid Mechanics Important MCQ PDFDocumento32 pagineMechanical Engineering-Fluid Mechanics Important MCQ PDFJom BautistaNessuna valutazione finora
- Unit - 3 Induction Motor DrivesDocumento29 pagineUnit - 3 Induction Motor DrivesselvaNessuna valutazione finora
- Electrical MCQSDocumento6 pagineElectrical MCQSFaheem FarooqNessuna valutazione finora
- 120 TOP MOST CURRENT ELECTRICITY - Electrical Engineering Multiple Choice Questions and AnswersDocumento11 pagine120 TOP MOST CURRENT ELECTRICITY - Electrical Engineering Multiple Choice Questions and Answersrose maryNessuna valutazione finora
- Engg Multiple Choice Questions - Instruments and MeasurementDocumento21 pagineEngg Multiple Choice Questions - Instruments and MeasurementVishwanath Brungi100% (1)
- 4-Economics MCQ Part PDFDocumento13 pagine4-Economics MCQ Part PDFAhmadNessuna valutazione finora
- Questions & Answers On Motor Control by Static Power ConvertersDocumento12 pagineQuestions & Answers On Motor Control by Static Power Converterskibrom atsbha100% (2)
- First Year Physics Chapter Wise Mcqs PDFDocumento49 pagineFirst Year Physics Chapter Wise Mcqs PDFabuzar khanNessuna valutazione finora
- Routh-Hurwitz Stability Criterion - Control Systems Questions and AnswersDocumento4 pagineRouth-Hurwitz Stability Criterion - Control Systems Questions and Answersحسن علي جاسمNessuna valutazione finora
- Subject: Theory of Machines-II: Sample Multiple Choice QuestionDocumento13 pagineSubject: Theory of Machines-II: Sample Multiple Choice QuestionSawai PareshNessuna valutazione finora
- Protaction MCQDocumento11 pagineProtaction MCQVishvajit PatelNessuna valutazione finora
- DC Machines MCQ QuizDocumento26 pagineDC Machines MCQ QuizUmer Altaf100% (1)
- 9A14403 Fluid Mechanics & Heat TransferDocumento8 pagine9A14403 Fluid Mechanics & Heat TransfersivabharathamurthyNessuna valutazione finora
- 195 Top Engineering Materials - Mechanical Engineering Multiple Choice Questions and AnswersDocumento34 pagine195 Top Engineering Materials - Mechanical Engineering Multiple Choice Questions and AnswersAnand AshkNessuna valutazione finora
- Engineering Mechanics MCQs PDFDocumento22 pagineEngineering Mechanics MCQs PDFvimalNessuna valutazione finora
- Mechanical Engineering Mcqs Part 2: Nts ResultsDocumento20 pagineMechanical Engineering Mcqs Part 2: Nts Resultsfake7083Nessuna valutazione finora
- Mechanical Engineering McqsDocumento267 pagineMechanical Engineering Mcqssantinkdr100% (2)
- Mechanical Engineering Theory of Machines MCQDocumento23 pagineMechanical Engineering Theory of Machines MCQwalunjmayur45275Nessuna valutazione finora
- Theory of MachinesDocumento168 pagineTheory of MachinesNagarajan Pitchandi100% (1)
- Quiz Unit1 AllDocumento6 pagineQuiz Unit1 AllbalajimetturNessuna valutazione finora
- Objectives Tom IDocumento25 pagineObjectives Tom IAkshay PatelNessuna valutazione finora
- Kinematics of MachineryDocumento9 pagineKinematics of Machinerygowrisankar32Nessuna valutazione finora
- Question Bank (MCQS) : Q, Then It Would Result in Grashof's Linkage Provided ThatDocumento5 pagineQuestion Bank (MCQS) : Q, Then It Would Result in Grashof's Linkage Provided ThatPrasad Govind KumbharNessuna valutazione finora
- Assignment 1 Simple Mechanism PDFDocumento1 paginaAssignment 1 Simple Mechanism PDFSarvesh ArbattiNessuna valutazione finora
- 154 TOP Theory of Machines - Mechanical Engineering Multiple Choice Questions and AnswersDocumento31 pagine154 TOP Theory of Machines - Mechanical Engineering Multiple Choice Questions and AnswersRavi kumarNessuna valutazione finora
- 154 TOP Theory of Machines - Mechanical Engineering Multiple Choice Questions and AnswersDocumento31 pagine154 TOP Theory of Machines - Mechanical Engineering Multiple Choice Questions and AnswerssurajsarpaleNessuna valutazione finora
- 154 TOP Theory of Machines - Mechanical Engineering Multiple Choice Questions and AnswersDocumento31 pagine154 TOP Theory of Machines - Mechanical Engineering Multiple Choice Questions and Answerstheory of machine fgietNessuna valutazione finora
- Modal Analysis Example ExcelDocumento1 paginaModal Analysis Example Excelkaranbir123Nessuna valutazione finora
- 33Documento40 pagine33farida2020Nessuna valutazione finora
- Geankoplis 2.6-4 2.7-4Documento7 pagineGeankoplis 2.6-4 2.7-4BenePicarNessuna valutazione finora
- DP09toc PDFDocumento1 paginaDP09toc PDFNerio CanadellNessuna valutazione finora
- Chapter 2 Rankine Cycle in EnglishDocumento26 pagineChapter 2 Rankine Cycle in EnglishRahmandan HafidNessuna valutazione finora
- Hyster j2 2 3 5xnDocumento12 pagineHyster j2 2 3 5xnBraveBoy JalloNessuna valutazione finora
- Productsheet C-Dur Supreme Deluxe ENDocumento1 paginaProductsheet C-Dur Supreme Deluxe ENfelghazi87Nessuna valutazione finora
- Diesel engine efficiency and power calculationsDocumento11 pagineDiesel engine efficiency and power calculationsMarc Graham Nacua100% (1)
- Product Release: CKMTA12 / 24Documento9 pagineProduct Release: CKMTA12 / 24Zewdu TsegayeNessuna valutazione finora
- Genuine: Choose Every Time!Documento40 pagineGenuine: Choose Every Time!DinamikaMarine50% (2)
- Relativity QuestionsDocumento4 pagineRelativity QuestionsChristoph KirchNessuna valutazione finora
- CDI 6: Fire Behavior and Arson Investigation ExamDocumento3 pagineCDI 6: Fire Behavior and Arson Investigation ExamRyan PelayreNessuna valutazione finora
- 032 Aeroplane Performance (JAA ATPL Theory)Documento429 pagine032 Aeroplane Performance (JAA ATPL Theory)dforceman0% (1)
- VRF Technical Data Book Highlights Key Specs (38k-61k BTU, 3-4.5 TonDocumento55 pagineVRF Technical Data Book Highlights Key Specs (38k-61k BTU, 3-4.5 TonFred BensimonNessuna valutazione finora
- Bujii Opel BenzinaDocumento2 pagineBujii Opel BenzinaCata Stefan0% (1)
- CV Rod Manuel TayaoDocumento4 pagineCV Rod Manuel TayaojaymarNessuna valutazione finora
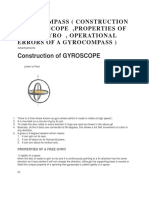
- Gyro CompassDocumento4 pagineGyro CompassABDU RAHEEM A. SNessuna valutazione finora
- Kic API X70Documento8 pagineKic API X70Ivan SilveiraNessuna valutazione finora
- 9-Baja Reaction Parts Catalog - Br150 Howhit 150cc Go Kart (Vin Prefix l6k)Documento42 pagine9-Baja Reaction Parts Catalog - Br150 Howhit 150cc Go Kart (Vin Prefix l6k)oakstrNessuna valutazione finora
- OMM Volvo Penta TAD 851 VE PDFDocumento78 pagineOMM Volvo Penta TAD 851 VE PDFHariyono Busro100% (5)
- DIN 51825 German Grease Classification System PDFDocumento1 paginaDIN 51825 German Grease Classification System PDFsoumya ghoshNessuna valutazione finora
- ChEg4124-Chap-3 (P-1)Documento46 pagineChEg4124-Chap-3 (P-1)Yonas TarekegnNessuna valutazione finora
- Short Courses Modelling and Computation of Multiphase FlowsDocumento4 pagineShort Courses Modelling and Computation of Multiphase FlowsKaushik SarkarNessuna valutazione finora
- Section 8 Maintenance & SpecificationsDocumento30 pagineSection 8 Maintenance & SpecificationsTaha RdmanNessuna valutazione finora
- Experiment # 10Documento4 pagineExperiment # 10Usama0% (1)
- Hydraulic Hose PDFDocumento86 pagineHydraulic Hose PDFAgus Yulfizar100% (1)
- Basic Motor Technical + Safe Area MotorsDocumento74 pagineBasic Motor Technical + Safe Area MotorsmayureshrmahajanNessuna valutazione finora
- Solar Water Heaters Guidelines V1 Aug 2019Documento49 pagineSolar Water Heaters Guidelines V1 Aug 2019Mile DjordjevicNessuna valutazione finora
- Me-1 To 10 Gf-PodiumDocumento10 pagineMe-1 To 10 Gf-PodiumKristina OrmacidoNessuna valutazione finora
- Stability Analysis of Columns With Variable Cross-Sections 1st Two Pages Placed LastDocumento12 pagineStability Analysis of Columns With Variable Cross-Sections 1st Two Pages Placed LastIntishar RahmanNessuna valutazione finora