Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
9 31 1 PB PDF
Caricato da
Andrea MorenoTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
9 31 1 PB PDF
Caricato da
Andrea MorenoCopyright:
Formati disponibili
Modelamiento de un Robot de Cinco Grados
de Libertad en un Mdulo de Manufactura
Flexible.
Yulieth Daz*, Naid Hernndez** y Jairo Montoya***
*Universidad de La Salle, jimediaz_21@hotmail.com ** Universidad de La
Salle,anhefo2406@gmail.com *** Universidad de La Salle, jamontoya@unisalle.edu.co
Resumen El mdulo de manufactura flexible, del como elemento terminal una pinza de dedos deslizantes,
laboratorio de CNC del programa de ingeniera en activada con seal neumtica. El espacio de trabajo del
Automatizacin, incluye dentro de sus componentes robot se aumenta, por medio de un eje deslizante sobre el
principales dos mquinas de control numrico computarizado
(CNC), las cuales realizan el mecanizado de piezas por cual se instala el robot, con el fin de poder posicionar
torneado y fresado. Para el posicionamiento de estas piezas, piezas en las mquinas de control numrico.
se cuenta con un brazo robtico CRS A255 al cual se le aplica Para garantizar el funcionamiento adecuado del robot, se
una metodologa de control, con el diseo de la interfaz identifican las restricciones de movimiento; se realiza el
grfica de usuario utilizando LabVIEW. Se desarrollan los modelamiento cinemtico directo, inverso y diferencial, para
modelos para calcular la cinemtica directa, inversa y poder definir las trayectorias a programar a travs del
diferencial. Luego se hace la validacin de las ecuaciones software compatible con el sistema de control; para
obtenidas, moviendo el robot por medio de un programa, el finalmente disear una interfaz grfica de usuario (GUI),
cual reconoce cada articulacin y muestra al usuario datos
desde la cual se pueden programar los diferentes
como: velocidad de movimiento, punto al que se lleva el
movimientos que debe realizar el brazo, con el fin de
extremo del robot, ngulo de desplazamiento de cada
articulacin y las rutinas para el posicionamiento de las piezas transportar las piezas desde la banda transportadora hasta
en las mquinas CNC. La precisin con la que el brazo llega a la respectiva mquina CNC (torno o fresadora) y viceversa.
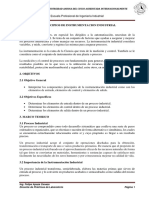
determinado punto se comprueba a travs de la validacin de La figura 1, muestra el robot CRS y la tabla I el rango de
los modelos en forma experimental, obtenindose errores del movimiento y dimensiones de los eslabones.
1,19% para la cinemtica directa y de 3% para la cinemtica
inversa, siendo estos valores tolerables y corroborando que
las trayectorias de movimiento que se establecieron son
adecuadas.
Palabras clave Robot, modelamiento, manufactura,
cinemtica.
Abstract The flexible manufacturing module of the CNC
Lab automation engineering program includes within its main
components two CNC machines, which perform machining by
turning and milling. For the positioning of these parts, a Fig. 1: Robot CRS.
control methodology is applied to the CRS A255 robotic arm,
TABLA I
using LabView as a graphic interface. In order to calculate
the forward, inverse and differential kinematics, the models RANGO DE MOVIMIENTO DE LAS ARTICULACIONES
associated to that methodology are developed. Validation of
Rango de Dimensiones
the models is performed after that moving the robot using the Articulacin
movimiento [] [mm]
software, which recognize each joint and shows data as links
1 (Cintura) 350 254
speed, endpoint of the end effector, angular displacement of
2 (Hombro) 110 254
each link and the paths for the positioning of the parts in the
3 (Codo) 130 254
CNC machines. The accuracy for the arm to reach the endpoint
4 (Mueca) 220 51
is assessed, validating the model experimentally, obtaining
5 (Herramienta) 350 154
error values of 1.19% for direct kinematics and 3% for inverse
kinematics, values that are acceptable for a good position and
confirming that the paths of motion that were established are II. MODELAMIENTO MATEMTICO DEL ROBOT
adequate.
CRS A 255
Keywords: Robot, modeling, manufacturing, kinematics. Este modelamiento permite obtener los valores
numricos, con los cuales se pueden analizar las
restricciones de movimiento antes de definir las trayectorias
a programar en LabView.
I. INTRODUCCIN
A. Cinemtica directa
El brazo CRS A255 posee 5 grados de libertad y 5
articulaciones, cuyo movimiento se realiza utilizando Segn [1], este modelo permite conocer la posicin y
orientacin que adopta el extremo del robot cuando cada
motores Servo-DC, los cuales cuentan con sensores
una de las variables que fijan la posicin u orientacin de
pticos tipo enconder incremental para su adecuado las articulaciones toman un determinado valor.
posicionamiento. La transmisin de movimiento desde los Para obtener este modelo, se tienen en cuenta las
motores hasta las articulaciones se hace por medio de caractersticas y dimensiones del brazo, ver figura 2. Con
sistemas de engranajes y cadenas de rodillo. El brazo tiene base en el trabajo de [2], se adecuan y plantean las
ecuaciones 1 a 4, que permiten determinar la posicin del
24 Universidad Antonio Nario
extremo del brazo (x, y, z) y el alcance horizontal (r). Con TABLA III
estas ecuaciones del modelo directo, se hace la simulacin RESULTADOS CINEMTICA DIRECTA
del manipulador, para ubicar este a partir de los valores de
las variables articulares. Terico Experimental Error
x=0 x=0 EX = 0%
y = 602 y = 604 EY = 0,3%
r l2 cos q2 l3 cos q3 l4 cos q4 (1)
z = 602 z = 605 EZ = 0,49%
x r * cos q1 (2) x=0 x=0 EX = 0%
y = 601 y = 600 EY = 0,17%
y r * sin q1 (3)
z = 271 z = 277 EZ = 2,22%
z l1 l2 sin q2 l3 sin q3 l4 sin q4 (4) x = 356 x = 365 EX = 2.5%
y = 356 y = 360 EY = 1,1%
z = 503 z = 503 EZ = 0%
Donde:
x=0 x=0 EX = 0%
r Proyeccin del vector con punto inicial en el origen y
y = 602 y = 604 EY = 0,3%
punto final en el extremo del elemento terminal,
z = 602 z = 605 EZ = 0,49%
sobre el plano XY.
x = 553 x = 550 EX = 0,5%
li longitud del eslabn i en mm. y = -97 y = -93 EY = 4,1%
qi ngulo girado por la articulacin i. z = 571 z = 573 EZ = 0,35%
l1 = l2 = l3 = 254 mm Error total ET = 1,19%
l4 = 205 mm
Obteniendo los promedios de error para cada caso, se
Obtenidas estas ecuaciones del modelo directo, se
ingresan a LabVIEW, con el fin de determinar el valor calcula error total el cual es ET = 1,19%, valor muy bajo y
terico de llegada del extremo del robot, para diversos que muestra que el modelo planteado es adecuado. En
casos, y en particular para las posiciones que se desean esta cinemtica, se analizan los movimientos de las
analizar. Para validar las anteriores ecuaciones, se realizan primeras cuatro (4) articulaciones, ya que la quinta
diferentes ensayos para determinar el error porcentual articulacin, es para la orientacin del elemento terminal y
entre el resultado terico y el resultado experimental entre no afecta la posicin del manipulador.
un punto de inicio y un punto de llegada, sin tener en
cuenta una secuencia de movimientos. En estos ensayos, B. Cinemtica inversa
se mueven las articulaciones del robot los ngulos
Segn [1], el modelo inverso, permite encontrar los
mostrados en la tabla II, los cuales cubren los diferentes
cuadrantes del espacio de trabajo. valores que deben adoptar las coordenadas articulares del
Realizada la validacin en 5 ensayos, se determina el robot para que su extremo se posicione y oriente segn
error promedio de posicionamiento predicho por el modelo una determinada localizacin espacial. Las ecuaciones de
terico. este modelo son funcin de la longitud de los eslabones y
de las coordenadas del punto a alcanzar.
TABLA II
Para obtener este modelo, se asume q 4 = 0, debido a
NGULOS DE LAS ARTICULACIONES CINEMTICA DIRECTA que su rotacin no afecta la posicin del extremo final del
Ensayo q1 q2 q3 q4 robot. Aplicando anlisis trigonomtrico, se obtienen las
1 90 45 -30 -10 ecuaciones (5) a (8), las cuales permiten determinar el
ngulo que debe girar cada articulacin, para llegar a un
2 45 0 10 90
punto especfico, dado por el usuario, (coordenadas Px, Py
3 90 45 15 30
y Pz). (Ver Figura 3).
4 180 60 -45 0
5 250 90 0 -80
6 350 50 -5 45
Luego se mide experimentalmente la posicin del
extremo y este valor se compara con el valor terico
obtenido. Finalmente, se calcula el error porcentual de
posicionamiento en los ejes X, Y y Z. La tabla III, muestra
los resultados de los casos evaluados.
Fig. 3: Posicin final deseado (PFD).
r Px
2
Py2 l4 cos q4 (5)
P
Fig. 2: Dimensiones y ejes de rotacin del robot CRS. q1 tan 1 x (6)
Py
Revista
UAN Vol. 2 No. 3 julio - diciembre de 2011
Te n d e n c i a s e n l a I n g e n i e r a 25
q1=230 Px= -302 Px= -280 EPx = 7,2
P
2
2 2
x Py l 4 cos q 4 ( Pz l1 ) 2 l 22 l 32 q2=80 Py= -359 Py= -363 EPy= 1,1
1 (7) q3= -30 Pz= 377 Pz= 386 EPz= 2,3
q 2 cos
2l 2 l 3 q1= 285 Px= 146 Px=150 EPx = 2,7
q2= 45 Py= -545 Py= -538 EPy= 1,2
q3= -45 Pz= 254 Pz= 258 EPz= 1,5
Promedio error ponderado ET = 2,9
Pz l1 l sin q
q3 tan 1 tan 1 2 2 (8)
2 2
Px Py l 4 cos q4
l l cos q
3 2 2
C. Cinemtica diferencial
Segn [3], el modelo diferencial, presenta la relacin
q2 q2 q3 (9) entre las velocidades de las articulaciones y las
velocidades lineales y angulares del efector final. Esta
representacin de la relacin se describe mediante la
Donde:
matriz Jacobiana. sta matriz, se obtiene derivando las
r Proyeccin del vector en el plano XY.
ecuaciones del modelo directo (Ecuaciones 1 a 4) respecto
qi ngulo que ser rotado cada articulacin al tiempo y se agrupan en trminos comunes. Conocida la
l1 = l2 = l3 = 254 mm matriz Jacobiana, se procede a calcular las componentes
l4 = 205 mm de la velocidad lineal del extremo del robot, reemplazando
q4 = 0 los correspondientes valores de velocidad angular de cada
articulacin. La ecuacin diferencial obtenida se ingresa a
En el caso del robot CRS A255, cuando se mueve una Matlab para as realizar el clculo de las velocidades del
articulacin, las otras mantienen su posicin, por lo que es extremo del brazo. Debido a que en el software con el que
necesario plantear una ecuacin adicional para compensar se controla el robot no es posible tener velocidades para
esta condicin, ecuacin 9. cada eslabn, se asigna el mismo valor de velocidad a las
Para validar las anteriores ecuaciones, se utiliza Matlab y cuatro articulaciones y se analizan tres casos (velocidad
se analizan puntos en los diferentes cuadrantes con el fin baja, media y alta), en un rango de 0.05 rad/s a 0.86 rad/s.
de obtener datos representativos. Se calculan los ngulos Los siguientes son los datos obtenidos al asignar el valor
de las articulaciones para alcanzar los siguientes puntos: de velocidad angular 0,05rad/s: componente de velocidad
en x, Vx = -0.0312, Vy = -0.0180 y Vz = 0.0312.
TABLA IV En los casos analizados, se puede observar que los
POSICIONES DEL EXTREMO CON CINEMTICA INVERSA resultados concuerdan con el movimiento del brazo, es
Punto X Y Z decir, el sentido de las coordenadas del vector que
1 157 431 508 describe el movimiento del brazo corresponde con el
2 507.5 293 474 sentido de las velocidades obtenidas para el extremo del
3 -603 348 319 robot.
4 -229 491 537
5 -302 -359 377 III. CONTROL DE POSICIONAMIENTO DEL ROBOT
6 146 -545 254 Para realizar el posicionamiento del elemento terminal, ya
que no se pudo implementar un controlador automtico
Los valores de ngulos obtenidos se introducen en las para el control posicionamiento, se utiliza el modelo
ecuaciones del modelo directo y se determina la posicin cinemtico inverso para calcular el valor que debe moverse
final del robot, la cual se compara con las coordenadas del cada articulacin. Luego el usuario, ingresa en la interfaz
punto deseado. La tabla V, muestra los resultados de los los valores correspondientes a la coordenada deseada.
ensayos realizados. Estos valores son analizados por la aplicacin desarrollada
Conociendo los promedios de error de cada caso, se para verificar las condiciones de restriccin y as determinar
obtiene un ET = 2.9%, valor adecuado para la aplicacin si el movimiento se puede realizar. Ver figura 4. Segn [4],
planteada. lo anterior equivale a considerar el robot provisto de
accionadores ideales sin dinmica, es decir, los
TABLA V accionadores proporcionan pares y fuerzas proporcionales
RESULTADOS CINEMTICA INVERSA a sus entradas.
ngulo Pto. Error
Pto. Real
Rotado Deseado [%]
q1=70 Px= 157 Px=167 EPx = 6,3
q2=90 Py=431 Py=425 EPy= 1,3
q3=0 Pz= 508 Pz= 512 EPz= 0,8
q1=30 Px=507,5 Px=510 EPx = 0,5
q2=60 Py = 293 Py=282 EPy= 3,7
q3=0 Pz= 474 Pz= 487 EPz= 2,7
q1= 150 Px= -603 Px= 603 EPx = 0
q2= 20 Py= 348 Py= 361 EPy= 3,7
q3= -5 Pz= 319 Pz= 331 EPz= 3,7
q1=115 Px= -229 Px=-205 EPx = 10
q2 = 70 Py= 491 Py= 484 EPy= 1,4
q3=10 Pz= 537 Pz= 548 EPz = 2
26 Universidad Antonio Nario
Fig. 5: Posicin, velocidad y aceleracin (P inicial y P final)
En la Figura 6, se puede observar el resultado de mover
desde el punto inicial dado de 0 hasta el final de 45
pasando por 15. La velocidad mxima es de 44,36 rad/s
en 1,065 segundos, que es la mitad del tiempo de recorrido
desde el punto intermedio hasta el punto final. La
aceleracin es mxima al iniciar el movimiento con un valor
2
de 285 rad/s .
Fig. 4: Metodologa de control.
IV. PERFILES DE VELOCIDAD Y ACELERACIN
Para obtener los perfiles de velocidad y aceleracin, se
debe partir de las ecuaciones 10 a 12 para la generacin
de trayectorias. Segn [5], las funciones de interpolacin
empleadas para el anlisis de las articulaciones del brazo
son las que se pueden observar, en donde los coeficientes
ai se calculan dependiendo del caso analizado. Se
analizaron 3 casos diferentes de trayectorias: Punto inicial
a punto final, con un punto intermedio y con 2 puntos
intermedios.
q a0 a1t a2t 2 a3t 3 (10)
2 Fig. 6: Posicin, velocidad y aceleracin con punto intermedio.
q a1 2a2t 3a3t (11)
q 2a2 6a3t 1 (12)
Donde:
q Posicin V. INTERFAZ GRFICA DE USUARIO
q Velocidad Para facilitar al usuario el manejo del robot a travs del
q Aceleracin PC, se realiza una interfaz grfica, mediante la cual el
t Tiempo usuario puede mover el brazo a una posicin especfica de
ai Coeficientes manera sencilla. En esta interfaz, se ingresa el valor en
grados que se desea mover cada articulacin y la
La figura 5, muestra los perfiles de velocidad para un velocidad a la que se quiere mover el brazo en rad/s.
movimiento del robot desde un punto inicial y un punto final. Tambin se tienen indicadores en los cuales se puede
En la grfica de velocidad se puede ver que las velocidades observar el desplazamiento en grados de cada articulacin
inicial y final son nulas, y que la velocidad mxima es de en tiempo real. Adicionalmente, cuenta con un botn de
40,18 rad/s y es alcanzada en la mitad del tiempo parada de emergencia. (Ver Figura 6).
transcurrido para completar el movimiento del robot.
Finalmente, para la aceleracin se observa que tiene un
2
valor mximo de 287 rad/s en 0s y toma valor negativo
despus de la mitad del tiempo de recorrido, este valor
negativo representa un cambio de direccin del vector
aceleracin, segn [6].
Revista
UAN Vol. 2 No. 3 julio - diciembre de 2011
Te n d e n c i a s e n l a I n g e n i e r a 27
la pieza ya mecanizada, girando a una velocidad alta en los
trayectos largos. Luego se desplaza en el riel hasta quedar
frente al punto donde se encuentra el pallet, movindose a
velocidad media cuando se aproxima al pallet que est
sobre la banda. Puesta la pieza mecanizada, el brazo se
posiciona nuevamente en home.
VII. CONCLUSIONES
El error de posicionamiento medio obtenido con los
modelos matemticos planteados permite predecir de
forma adecuada la ubicacin real de la pieza que se desea
ubicar en una posicin programada. Por lo tanto, estos
modelos permiten predecir de forma confiable el
posicionamiento para otros robots con configuraciones
Fig. 6: Interfaz grfica de usuario. similares pero con eslabones de diferente longitud.
Los resultados de los modelos matemticos obtenidos,
Como la funcin del brazo CRS A255 es transportar las se pueden aplicar de forma secuencial para obtener la
piezas desde la banda transportadora hacia el torno y la posicin final de llegada, situacin en la cual es necesario ir
fresadora, se van a establecer las trayectorias desde la sumando los errores promedio calculados para cada
banda hacia el torno y viceversa, igualmente para la trayectoria, con el fin de obtener el error total de
fresadora. posicionamiento en el punto total deseado.
En este proyecto, no se tuvo en cuenta la sincrona de El porcentaje de error obtenido para la cinemtica directa
operacin entre el brazo robtico y las mquinas CNC, (1,19%), es menor que el porcentaje obtenido para la
debido a que no estaba incluido dentro de los objetivos. Lo cinemtica inversa (2.9%). Esto permite corroborar que los
que s es importante es establecer la posicin del brazo modelos aplicados son los apropiados, ya que los errores
robtico con respecto a cada una de las mquinas CNC y son bajos y permiten garantizar que las trayectorias
la respectiva secuencia de trayectorias para cargar y programadas para el posicionamiento de las piezas en la
descargar con piezas de trabajo, de forma adecuada a la banda, torno y fresadora se realizarn sin ningn problema
mquina herramienta a pesar de los errores de y los mecanismos antes mencionados estarn en
posicionamiento. capacidad de recibir o entregar las piezas de forma
adecuada sin que haya falla en el proceso por este error de
posicionamiento.
VI. PROGRAMACIN DE TRAYECTORIAS. Cuando se vara la velocidad del movimiento de las
Como la funcin del brazo CRS A255 es transportar las articulaciones, en un rango de valores bajos, medios o
piezas desde la banda transportadora hacia el torno y la altos, para alcanzar un punto determinado, el desempeo
fresadora, se van a establecer las trayectorias desde la del brazo no se ve afectado. Esto se puede comprobar con
banda hacia el torno y viceversa, igualmente para la los porcentajes de error calculados, ya que la diferencia
fresadora. entre estos no es significativa y ninguno de los porcentajes
Para el torno, estando el brazo en posicin home (Ver
supera el 1%.
Figura 3), este se desplazar a una velocidad media para
recoger la pieza que est en el pallet sobre la banda. Una
vez recogida la pieza este se desplaza por el riel hasta el
extremo del mismo frente al torno, luego rota a alta REFERENCIAS
velocidad ya que es un trayecto largo de recorrer. Estando [1] A. Barrientos, L. Pein, C. Balaguer, R. Aracil Fundamentos
junto a la copa del torno se empieza a desplazar a baja de robtica, Madrid. Editorial Mc Graw Hill 2007.
velocidad para evitar choques y posicionar la pieza [2] A Ollero.Robtica manipuladores y robots mviles.
adecuadamente en el torno. Una vez posicionada la pieza, Marcombo, Barcelona. Editorial Alfaomega. 2001.
el brazo se retira y la pieza es mecanizada. Terminado este [3] S. Saha. Introduccin a la robtica. Mxico. Editorial Mc Graw
proceso, el brazo se desplaza a baja velocidad para tomar Hill 2010.
la pieza ya mecanizada y llevarla de nuevo hacia la banda [4] R. Kelly. Control de movimiento de robots manipuladores.
transportadora, movindose a una velocidad alta en el Madrid. Prentice Hall. 2003.
trayecto largo. Luego se desplaza en el riel hasta quedar [5] J. Montoya Gmez; J.L. Rubiano Fernndez. Modelamiento,
frente al punto donde se encuentra el pallet, movindose a simulacin y control off line de trayectorias del Robot
hidrulico para funciones de ensamblaje orientadas a
velocidad media cuando se aproxima al pallet que est
sistemas flexibles de manufactura del laboratorio de Robtica
sobre la banda. Puesta la pieza mecanizada, el brazo se y CIM. Bogot. Universidad de La Salle. 2008.
posiciona nuevamente en home. [6] J. Montoya Gmez, J. Rubiano Fernndez. Modelling and
Para la fresadora, estando el brazo en posicin home simulation of trajectories for hydraulic robot applied to
(Ver Figura 3), este se desplaza a una velocidad media assembly functions in a flexible manufacturing system.
para recoger la pieza que est en el pallet sobre la banda. Universidad de La Salle, Revista psilon pp. 105-113. 2009.
Una vez recogida la pieza, este se desplaza por el riel
hasta el extremo del mismo frente a la fresa. Luego rota a
alta velocidad ya que es un trayecto largo de recorrer. Se
empieza a desplazar a baja velocidad para evitar
accidentes y posicionar la pieza adecuadamente en la
prensa de la fresa. Una vez posicionada la pieza, el brazo
se retira, y la pieza es mecanizada. Terminado este
proceso, el brazo se desplaza a baja velocidad para tomar
28 Universidad Antonio Nario
Potrebbero piacerti anche
- Why Nonlinear Control - En.españolDocumento12 pagineWhy Nonlinear Control - En.españolAndrea MorenoNessuna valutazione finora
- BordesDocumento15 pagineBordespbcanessaNessuna valutazione finora
- Sistemas AutonomosDocumento80 pagineSistemas AutonomosJavierJiménezNessuna valutazione finora
- Apuntes Sistemas No LinealesDocumento97 pagineApuntes Sistemas No Linealeswilo_vb100% (1)
- Potencia GuiasDocumento260 paginePotencia GuiasAndrea MorenoNessuna valutazione finora
- Introducción A Los Sistemas No LinealesDocumento20 pagineIntroducción A Los Sistemas No LinealesAndrea MorenoNessuna valutazione finora
- DatasDocumento532 pagineDatasAndrea MorenoNessuna valutazione finora
- Guia Lab 1 Robotica I MatlabDocumento12 pagineGuia Lab 1 Robotica I MatlabEdwin DazzaNessuna valutazione finora
- InstructivoDocumento7 pagineInstructivoAndrea MorenoNessuna valutazione finora
- Prueba de ControladoresDocumento177 paginePrueba de ControladoresAndrea MorenoNessuna valutazione finora
- Capítulo 2 SED (Iñaqui)Documento7 pagineCapítulo 2 SED (Iñaqui)Andrea MorenoNessuna valutazione finora
- Comandos MatLabDocumento4 pagineComandos MatLabvictor20008Nessuna valutazione finora
- TFG Alejandro Aguilar RomeroDocumento80 pagineTFG Alejandro Aguilar RomeroAndres CoyNessuna valutazione finora
- Prueba de ControladoresDocumento177 paginePrueba de ControladoresAndrea MorenoNessuna valutazione finora
- Guia Lab 3 Bases Matematicas IDocumento5 pagineGuia Lab 3 Bases Matematicas IAndrea MorenoNessuna valutazione finora
- Se Independiente Como Freelancer en 30 DiasDocumento48 pagineSe Independiente Como Freelancer en 30 DiasENRIQUENessuna valutazione finora
- Diseño Conceptual Del SISDocumento8 pagineDiseño Conceptual Del SISAndrea MorenoNessuna valutazione finora
- Ejemplo Representacion de SeñalesDocumento7 pagineEjemplo Representacion de SeñalesOmar Gerardo Sida LopezNessuna valutazione finora
- Viscosidad y Mecanismo Del TransporteDocumento91 pagineViscosidad y Mecanismo Del TransporteAndrea MorenoNessuna valutazione finora
- Capitulo 7 TransformadorDocumento38 pagineCapitulo 7 Transformadorgeorgebrescener64Nessuna valutazione finora
- Normas ISA S5-25Documento27 pagineNormas ISA S5-25Jonathan Paucar TenorioNessuna valutazione finora
- TS Practica7Documento12 pagineTS Practica7Andrea MorenoNessuna valutazione finora
- Instrucciones de Instalacion - PROPHfsETDocumento1 paginaInstrucciones de Instalacion - PROPHfsETAndrea MorenoNessuna valutazione finora
- Formulario VigasDocumento16 pagineFormulario Vigasjcarvacho90% (10)
- InformaciónDocumento4 pagineInformaciónjruizc8Nessuna valutazione finora
- Capitulo 7 TransformadorDocumento38 pagineCapitulo 7 Transformadorgeorgebrescener64Nessuna valutazione finora
- Maquinas ElectricasiDocumento603 pagineMaquinas ElectricasiSabuina Valencia AyalaNessuna valutazione finora
- Levas en SolidDocumento6 pagineLevas en SolidPablo DavilaNessuna valutazione finora
- Ejercicios de Volumenes para PortalesoDocumento13 pagineEjercicios de Volumenes para Portalesojavi_07_5100% (1)
- Silabo de Documentacion Comercial y ContableDocumento6 pagineSilabo de Documentacion Comercial y ContableAbelCastañedaNessuna valutazione finora
- UntitledDocumento226 pagineUntitledKim MNessuna valutazione finora
- WWW Yoquieroaprobar EsDocumento7 pagineWWW Yoquieroaprobar EsAlicia gbNessuna valutazione finora
- Jeon Junkook Datos y CuriosidadesDocumento53 pagineJeon Junkook Datos y CuriosidadesValentina LRNessuna valutazione finora
- Flavia Terigi - La Formación Incial de Profesores de Educación SecundariaDocumento22 pagineFlavia Terigi - La Formación Incial de Profesores de Educación Secundarialaulopez520Nessuna valutazione finora
- Teoría de La MedidaDocumento9 pagineTeoría de La Medidapaula0305Nessuna valutazione finora
- Balotario Del Curso de NotarialDocumento24 pagineBalotario Del Curso de Notarialsocorro zevallos vilchezNessuna valutazione finora
- El Concepto P2p+Documento2 pagineEl Concepto P2p+Dalila Mendoza AguilarNessuna valutazione finora
- IMO MSC.1-Circ.1330 Protective CoatingDocumento23 pagineIMO MSC.1-Circ.1330 Protective CoatingJorge Alberto MontalatNessuna valutazione finora
- Taller Semana 3Documento2 pagineTaller Semana 3Nicolas Alias0% (1)
- Ejercicios Tema 4 Inferencia Estadistica PDFDocumento13 pagineEjercicios Tema 4 Inferencia Estadistica PDFArion Yolicar AQNessuna valutazione finora
- Principio de IncertidumbreDocumento8 paginePrincipio de IncertidumbreErik MorochoNessuna valutazione finora
- Principios de Instrumentacion IndustrialDocumento8 paginePrincipios de Instrumentacion IndustrialFelipe ApazaNessuna valutazione finora
- Parcial GERENCIA ESTRATEGICA #1Documento7 pagineParcial GERENCIA ESTRATEGICA #1Angel MiguelNessuna valutazione finora
- 26 RimasDocumento2 pagine26 RimasArmenia SonsonateNessuna valutazione finora
- 12.10 Multiprop PR E 72Documento24 pagine12.10 Multiprop PR E 72guillepramalNessuna valutazione finora
- INTERFONDOS - Declaración Jurada de Residencia Fiscal Personas NaturalesDocumento1 paginaINTERFONDOS - Declaración Jurada de Residencia Fiscal Personas NaturalesEric Gutmann ZamoraNessuna valutazione finora
- Cursos Online Con Certificado 2021 - 2da ParteDocumento8 pagineCursos Online Con Certificado 2021 - 2da Parteestrellaquilla16Nessuna valutazione finora
- Árbol Genealógico de La Mitología Griega - Antigua GreciaDocumento1 paginaÁrbol Genealógico de La Mitología Griega - Antigua GreciaAquino100% (6)
- Ga-1552 Sandra Magalon MLR60 Exportacion-1Documento1 paginaGa-1552 Sandra Magalon MLR60 Exportacion-1sya2501Nessuna valutazione finora
- Manual de Entrenamiento de La F - Mladen JovanoviDocumento494 pagineManual de Entrenamiento de La F - Mladen JovanoviFacundo Holgado92% (13)
- Comandita SimpleDocumento4 pagineComandita SimpleRicardo AndreNessuna valutazione finora
- Clases Semanas 6 J7 J8 J9 Der Internal Publico y Privado 2023 - 20Documento11 pagineClases Semanas 6 J7 J8 J9 Der Internal Publico y Privado 2023 - 20Valeria BuitragoNessuna valutazione finora
- Blastomicosis 2020Documento23 pagineBlastomicosis 2020Naomi PochonNessuna valutazione finora
- Guia Espina de PescadoDocumento13 pagineGuia Espina de Pescadowilliam castañedaNessuna valutazione finora
- Tarea 4.2Documento6 pagineTarea 4.2Hector LopezNessuna valutazione finora
- Anunciada Secuela de Shugo Chara! - Ramen para DosDocumento23 pagineAnunciada Secuela de Shugo Chara! - Ramen para DosAlbani hurtadoNessuna valutazione finora
- Escala VDocumento17 pagineEscala VSandraNessuna valutazione finora
- Informe #05 CalicatasDocumento11 pagineInforme #05 CalicatasJulio Cesar Ambrosio CamposNessuna valutazione finora
- TEMA 6 Packer de ProduccionDocumento10 pagineTEMA 6 Packer de ProduccionDeybid Edson Enc100% (1)