Potrebbero piacerti anche
- Medicion RecalentamientoDocumento3 pagineMedicion Recalentamientoaucadenas100% (12)
- Ejercicios 1 4Documento7 pagineEjercicios 1 4Jorge Romero100% (1)
- Gestion de RiesgosDocumento48 pagineGestion de RiesgosHenry JunniorNessuna valutazione finora
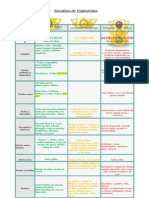
- Semaforo Hipertrigliceridemia (1) ChequeadaDocumento2 pagineSemaforo Hipertrigliceridemia (1) ChequeadaMarcela AdasmeNessuna valutazione finora
- Justificación Del Uso Del Cuaderno para 3 A PreescolarDocumento5 pagineJustificación Del Uso Del Cuaderno para 3 A PreescolarCaro Maya100% (1)
- BIP Julyette Paulin Gómez Vera 3Documento8 pagineBIP Julyette Paulin Gómez Vera 3julianaNessuna valutazione finora
- ExposicionDocumento18 pagineExposicionLuis Alfredo GaiborNessuna valutazione finora
- Convenio de Individual de Prestaciones AlimentariasDocumento2 pagineConvenio de Individual de Prestaciones AlimentariasDiana suarezNessuna valutazione finora
- Proyecto-Literatura Décimo.Documento3 pagineProyecto-Literatura Décimo.emili monarNessuna valutazione finora
- Busso, PaulaDocumento18 pagineBusso, PaulaBIBHUMANessuna valutazione finora
- Inversión Extranjera Directa en Colombia PDFDocumento8 pagineInversión Extranjera Directa en Colombia PDFRubert Eduardo Quintero OrozcoNessuna valutazione finora
- Tarea en ClaseDocumento17 pagineTarea en ClaseBrian Ricardo Flores Orellana100% (1)
- MineroReyes JenniferGuiviny M2S3AI5Documento2 pagineMineroReyes JenniferGuiviny M2S3AI5jennifer minero reyesNessuna valutazione finora
- BARRENADODocumento7 pagineBARRENADODavid PichogagónNessuna valutazione finora
- Unidad I Programacion Computacional IVDocumento71 pagineUnidad I Programacion Computacional IVEmerson Humberto Lopez CruzNessuna valutazione finora
- Posición en RampaDocumento3 paginePosición en RampaCARLOS FRANCISCO MANTILLA MONTALVONessuna valutazione finora
- El Contrato de TrabajoDocumento13 pagineEl Contrato de Trabajoalejandro lopezNessuna valutazione finora
- Catal HuyukDocumento1 paginaCatal Huyukcamila moraNessuna valutazione finora
- Foro 2Documento2 pagineForo 2Mariela MeloNessuna valutazione finora
- Sociales Taller 10 PDFDocumento2 pagineSociales Taller 10 PDFAndrea Giraldo HerreraNessuna valutazione finora
- El Control Como Función Administrativa - Finalizado - G2 - ADocumento5 pagineEl Control Como Función Administrativa - Finalizado - G2 - APEDRO LUIS LOPEZ CHAVEZNessuna valutazione finora
- La Lengua y Sus VariedadesDocumento5 pagineLa Lengua y Sus VariedadesPeachmi MCNessuna valutazione finora
- Parasitosis IntestinalesDocumento24 pagineParasitosis IntestinalesFrancisco ChalenNessuna valutazione finora
- Capitulo 2 Comprension y Modelado de Los Sistemas OrganizacionalesDocumento44 pagineCapitulo 2 Comprension y Modelado de Los Sistemas Organizacionalesezzeldin mohamedNessuna valutazione finora
- Influencia de Las Peliculas Animadas de Disney en Los Niños de América Desde La Década de 1950 Hasta La Actualidad. UPC-PERUDocumento38 pagineInfluencia de Las Peliculas Animadas de Disney en Los Niños de América Desde La Década de 1950 Hasta La Actualidad. UPC-PERUDanielChipana67% (3)
- Cuestionatrio - Robotica Industrial - 08jun2020Documento5 pagineCuestionatrio - Robotica Industrial - 08jun2020Wellintong Orlando SalanNessuna valutazione finora
- Parcial - Escenario 4 - Primer Bloque-Teorico - Practico - Virtual - Gerencia Financiera - (Grupo b10)Documento8 pagineParcial - Escenario 4 - Primer Bloque-Teorico - Practico - Virtual - Gerencia Financiera - (Grupo b10)Lady BonNessuna valutazione finora
- Cata Logo FachaletasDocumento37 pagineCata Logo FachaletasTallerNic SMANessuna valutazione finora
- Combustión Alcohol EtílicoDocumento7 pagineCombustión Alcohol EtílicoOoscaar Daaviid Yaaneez LaaraaNessuna valutazione finora
- MANUAL DE PRACTICAS PROFESIONALES (Versión Consejo Académico) 10-03-2021Documento14 pagineMANUAL DE PRACTICAS PROFESIONALES (Versión Consejo Académico) 10-03-2021Luis MendezNessuna valutazione finora