Potrebbero piacerti anche
- PWM CDocumento2 paginePWM CMore FunNessuna valutazione finora
- Eg8010 SPWM v2.2 enDocumento13 pagineEg8010 SPWM v2.2 enSandeep S50% (2)
- HS8108Documento8 pagineHS8108Miloš ZorićNessuna valutazione finora
- PidDocumento5 paginePidArif Nugroho100% (1)
- Mt8223.Lm SemaDocumento9 pagineMt8223.Lm Semadanielradu27Nessuna valutazione finora
- Ch402 - 403 - OPDocumento2 pagineCh402 - 403 - OPhp691550% (2)
- Zero Drop SpecDocumento9 pagineZero Drop SpecSunu Karthikappallil100% (1)
- PIC16F72: LM393 C1815 PC817 5K 5K 5K Transformer Bilal Electronics KarachiDocumento1 paginaPIC16F72: LM393 C1815 PC817 5K 5K 5K Transformer Bilal Electronics KarachiMian Fahim100% (1)
- PCB Connection Drawing For MP-RT Series PDFDocumento9 paginePCB Connection Drawing For MP-RT Series PDFEmil MladenovNessuna valutazione finora
- ProgramDocumento17 pagineProgramMian FahimNessuna valutazione finora
- Codigo LCD C ModificadoDocumento3 pagineCodigo LCD C ModificadoMartinQuintanaCasusol100% (1)
- Schematic - Ampcontrol f103 - Ampcontrol f103 2.8 Ili9341 SPI - 20190212135815 PDFDocumento1 paginaSchematic - Ampcontrol f103 - Ampcontrol f103 2.8 Ili9341 SPI - 20190212135815 PDFmarius tanjalaNessuna valutazione finora
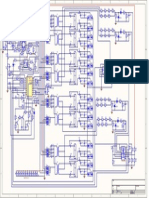
- 715G6677 P02 001 0020+psuDocumento6 pagine715G6677 P02 001 0020+psuIvanilto Martins da Cruz100% (2)
- TOSHIBA 32AV500U Wiring - DiagramDocumento1 paginaTOSHIBA 32AV500U Wiring - Diagramdreamyson1983Nessuna valutazione finora
- MTI-2510 DDC MANAGER MasTechDocumento23 pagineMTI-2510 DDC MANAGER MasTechfox7878100% (5)
- Control CircuitDocumento1 paginaControl CircuitMian FahimNessuna valutazione finora
- Darfon v144-001 Inverter Oz960g lm324 lm393 Fds8958a lm339Documento1 paginaDarfon v144-001 Inverter Oz960g lm324 lm393 Fds8958a lm339Luis TavisNessuna valutazione finora
- Driver L297 + L6203Documento2 pagineDriver L297 + L6203TatiiieleeeNessuna valutazione finora
- U Supply Bench Rev BDocumento1 paginaU Supply Bench Rev BStoica Valentin CatalinNessuna valutazione finora
- 16.16 Asda-A2 Servo Drive (Ds301) Controlled by Canopen Bus: Control RequirementDocumento16 pagine16.16 Asda-A2 Servo Drive (Ds301) Controlled by Canopen Bus: Control Requirementleomar_bNessuna valutazione finora
- Panasonic TH l24c20dDocumento39 paginePanasonic TH l24c20dKingsleen33% (3)
- SMD Resistor Examples (EIA-96 Code)Documento5 pagineSMD Resistor Examples (EIA-96 Code)Nisar Ahmed67% (3)
- Piq201 Piq201: Pid101 Pid102 Piq502 Piq203 Piq403 Pid102 Pid101 Piq502Documento3 paginePiq201 Piq201: Pid101 Pid102 Piq502 Piq203 Piq403 Pid102 Pid101 Piq502dejanNessuna valutazione finora
- Gtreed HyrrfdDocumento6 pagineGtreed Hyrrfdjulius chan100% (1)
- List TransistorDocumento12 pagineList TransistorFudin Safudin100% (2)
- Si4825 A10 PDFDocumento21 pagineSi4825 A10 PDFTuribio Almeida Barbosa100% (1)
- La 76931Documento3 pagineLa 76931Daniel AvecillaNessuna valutazione finora
- PIC 16F876A Sine Wave InverterDocumento2 paginePIC 16F876A Sine Wave InverterKorede Ibraheem83% (12)
- CV59SH-ASM - Placa Main - Service ManualDocumento55 pagineCV59SH-ASM - Placa Main - Service Manualjose4445Nessuna valutazione finora
- 1st Project Dspic BasicDocumento4 pagine1st Project Dspic Basickywheat3306Nessuna valutazione finora
- JSK4267-022 Service Manual PDFDocumento32 pagineJSK4267-022 Service Manual PDFЕфрушка Мишанов100% (2)
- Microcontroller Based Solar Charge Controller ProjectDocumento5 pagineMicrocontroller Based Solar Charge Controller ProjectAbir AhmedNessuna valutazione finora
- Philips 21PT5438Philips 21PT5438Documento52 paginePhilips 21PT5438Philips 21PT5438Manoj Sebastian0% (1)
- Power Inverter 3kw Schematics PDFDocumento1 paginaPower Inverter 3kw Schematics PDFmitio mitioniNessuna valutazione finora
- Modalities of Using The ADC Module of PIC16F877ADocumento30 pagineModalities of Using The ADC Module of PIC16F877Atahmidmc83% (12)
- Service Manual: AmplifierDocumento20 pagineService Manual: AmplifierHakan Atak100% (1)
- Sine Wave Generation and Implementation Using dsPIC33FJDocumento27 pagineSine Wave Generation and Implementation Using dsPIC33FJTahmid100% (10)
- 74HC04D 74HC04D 74HC04D 74HC04D: 600K Oscillating CircuitDocumento2 pagine74HC04D 74HC04D 74HC04D 74HC04D: 600K Oscillating CircuitTecnoaudio Guarapiche33% (3)
- Schematic MTK8227-C - 1463535017675Documento10 pagineSchematic MTK8227-C - 1463535017675Anil Bps100% (1)
- Alto A200.2 Power Amp Service ManualDocumento25 pagineAlto A200.2 Power Amp Service ManualmundomusicalmeriaNessuna valutazione finora
- Unor3smbus 2.inoDocumento6 pagineUnor3smbus 2.inoM. Randy AswinNessuna valutazione finora
- SchematicDocumento1 paginaSchematicArdhy Iskandar100% (2)
- Tps 65148Documento31 pagineTps 65148Jessica Jhon100% (1)
- Schematic Multi-Input Module WM8805Documento3 pagineSchematic Multi-Input Module WM8805aleksa64Nessuna valutazione finora
- T.VST29.03 4Documento13 pagineT.VST29.03 4Sutrisno Ok100% (1)
- OrgcmdDocumento13 pagineOrgcmdMuhammad Jalal AldeenNessuna valutazione finora
- Cheatsheet SuPDocumento9 pagineCheatsheet SuPoana natarauNessuna valutazione finora
- Drone BlinkDocumento4 pagineDrone BlinkptrNessuna valutazione finora
- Assignment 1 ReportDocumento19 pagineAssignment 1 ReportJyiou YimushiNessuna valutazione finora
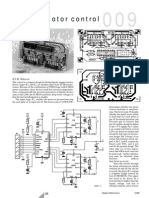
- HBridgeMotorControl With PICDocumento11 pagineHBridgeMotorControl With PICcoceicr100% (3)
- Arm MicrocontrollerDocumento17 pagineArm MicrocontrollerIragoudaNessuna valutazione finora
- Novo Documento de TextoDocumento15 pagineNovo Documento de TextoJonatan Allan Oliveira SouzaNessuna valutazione finora
- "msp430x20x2.h": // TXD On P1.1 // RXD On P1.2Documento6 pagine"msp430x20x2.h": // TXD On P1.1 // RXD On P1.2oravetznNessuna valutazione finora
- Note CCSDocumento19 pagineNote CCSThang TruongNessuna valutazione finora
- Arduino Arpeggiator CodeDocumento38 pagineArduino Arpeggiator CodeAdrianoEngelNessuna valutazione finora
- #Include #Include #Include #IncludeDocumento5 pagine#Include #Include #Include #IncludeFerry adityaNessuna valutazione finora
- Appendix ADocumento7 pagineAppendix AAbul KashemNessuna valutazione finora
- PWMDocumento17 paginePWMmaintboardNessuna valutazione finora
- PWM LedsDocumento6 paginePWM LedsJavier Arredondo Muñoz Ledo100% (1)
- ARM Embedded Controller ManualDocumento28 pagineARM Embedded Controller ManualGagan NaiduNessuna valutazione finora
- Philips hts3610-12-51 SMDocumento37 paginePhilips hts3610-12-51 SMNicoleta GhermanNessuna valutazione finora
- 2008 Gulfstream G200: Serial Number 207 - Registration M-IltdDocumento20 pagine2008 Gulfstream G200: Serial Number 207 - Registration M-IltdDharmendra Sumitra Upadhyay100% (1)
- DFo 3 1Documento44 pagineDFo 3 1Asfia SadrinaNessuna valutazione finora
- Spring Boot - LoggingDocumento4 pagineSpring Boot - LoggingChandu ChandrakanthNessuna valutazione finora
- Program Your Own LanguageDocumento56 pagineProgram Your Own LanguageBcalh3Nessuna valutazione finora
- Salzbankresume2015 2016Documento1 paginaSalzbankresume2015 2016api-300692572Nessuna valutazione finora
- X12/V6020/810: 810 InvoiceDocumento38 pagineX12/V6020/810: 810 Invoicejeffa123Nessuna valutazione finora
- Hadoop Value Eon HDFSDocumento2 pagineHadoop Value Eon HDFSWLSNessuna valutazione finora
- Resume TumurDocumento1 paginaResume TumurTumur BazarragchaaNessuna valutazione finora
- DiodeDocumento4 pagineDiodePrashanth Kumar ShettyNessuna valutazione finora
- SET 7 Soal Latihan MTCREDocumento3 pagineSET 7 Soal Latihan MTCREErik Martin S., S.Kom. SMKS YADIKA 11 Jatirangga100% (1)
- Lesson 4.2 - Greatest Common FactorDocumento23 pagineLesson 4.2 - Greatest Common FactorehystadNessuna valutazione finora
- MT6571 Android V2 ScatterDocumento5 pagineMT6571 Android V2 ScatteranthonyNessuna valutazione finora
- Logic Made Easy WarringDocumento58 pagineLogic Made Easy WarringVladimir MisataNessuna valutazione finora
- Bts3911e&Wifi InfoDocumento3 pagineBts3911e&Wifi InfoadilNessuna valutazione finora
- Olike Product Catalog Dealer & Retail MAY22 v.2Documento108 pagineOlike Product Catalog Dealer & Retail MAY22 v.2b8272679Nessuna valutazione finora
- Cisco 7841Documento8 pagineCisco 7841bbpearlvnNessuna valutazione finora
- Readhat Premium EX200 by VCEplus 24qDocumento12 pagineReadhat Premium EX200 by VCEplus 24qMamoon20Nessuna valutazione finora
- Bts Wallpapers - Búsqueda de GoogleDocumento1 paginaBts Wallpapers - Búsqueda de GoogleMarichuy LaraNessuna valutazione finora
- Smash Up RulebookDocumento12 pagineSmash Up RulebookRobert MilesNessuna valutazione finora
- Jeporday GameDocumento27 pagineJeporday Gameapi-540635052Nessuna valutazione finora
- BAPI EnhancementDocumento6 pagineBAPI EnhancementSathish B SathishNessuna valutazione finora
- Free Go Kart PlansDocumento28 pagineFree Go Kart PlansOsy OsyNessuna valutazione finora
- Cambridge IGCSE: Information and Communication Technology 0417/22Documento12 pagineCambridge IGCSE: Information and Communication Technology 0417/22syedanwarahmed5870Nessuna valutazione finora
- Design of High-Speed 16 To 4 Priority Encoder Using GDI: Ii. CmosDocumento5 pagineDesign of High-Speed 16 To 4 Priority Encoder Using GDI: Ii. CmosناصرھرەNessuna valutazione finora
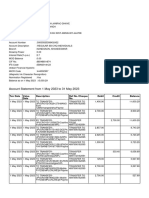
- Account Statement From 1 May 2023 To 31 May 2023: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocumento10 pagineAccount Statement From 1 May 2023 To 31 May 2023: TXN Date Value Date Description Ref No./Cheque No. Debit Credit Balanceavinashdeshmukh7027Nessuna valutazione finora
- Program 5th NSysS v5Documento4 pagineProgram 5th NSysS v5LabibaNessuna valutazione finora
- 7701821350PL AvayaDocumento830 pagine7701821350PL AvayaVincent NormanNessuna valutazione finora
- CP2600-OP, A20 DS 1-0-2 (Cat12 CPE)Documento2 pagineCP2600-OP, A20 DS 1-0-2 (Cat12 CPE)hrga hrgaNessuna valutazione finora
- Object-Oriented Programming (OOP) Lecture No. 4Documento26 pagineObject-Oriented Programming (OOP) Lecture No. 4Muhammad ZeeshanNessuna valutazione finora