Potrebbero piacerti anche
- Activity3 Group1Documento16 pagineActivity3 Group1NicoNessuna valutazione finora
- Ring OscillatorDocumento13 pagineRing OscillatorAnonymous eWMnRr70qNessuna valutazione finora
- An-Najah University: Electrical Circuits LabDocumento7 pagineAn-Najah University: Electrical Circuits LabAdel AtawiNessuna valutazione finora
- شيت مختبر الكترونيك القدرة 2 PDFDocumento21 pagineشيت مختبر الكترونيك القدرة 2 PDFMustafa MhmoodNessuna valutazione finora
- Wien Bridge Oscillator With Real Amplifiers: September 2015Documento39 pagineWien Bridge Oscillator With Real Amplifiers: September 2015Manoj KhatriNessuna valutazione finora
- Module 6: Resonance Lecture 6: Resonance: 6.1 Electrical CircuitsDocumento3 pagineModule 6: Resonance Lecture 6: Resonance: 6.1 Electrical CircuitsDr Srini vasanNessuna valutazione finora
- Expt 5.1Documento6 pagineExpt 5.1Joel Catapang0% (1)
- Sinusoidal AC Circuit MeasurementsDocumento17 pagineSinusoidal AC Circuit MeasurementsComputer Guru100% (4)
- Current Electricity Part 01Documento120 pagineCurrent Electricity Part 01Vishal MehtaNessuna valutazione finora
- CAPE U2 LAB#2 Azariah BarrettDocumento6 pagineCAPE U2 LAB#2 Azariah BarrettazaribarrNessuna valutazione finora
- Activity No. 4 Inductive Circuit ObjectivesDocumento4 pagineActivity No. 4 Inductive Circuit ObjectivesJohn Paul BaquiranNessuna valutazione finora
- RC CircuitsDocumento34 pagineRC CircuitsNader ElenanyNessuna valutazione finora
- The Input Impedance of Rectifier Modulators: by Professor D. G. TUCKER, D.SC, MemberDocumento9 pagineThe Input Impedance of Rectifier Modulators: by Professor D. G. TUCKER, D.SC, MembershirtquittersNessuna valutazione finora
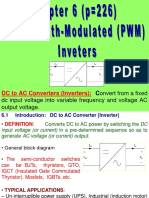
- Pe Chapter 6 DC Ac 1Documento32 paginePe Chapter 6 DC Ac 1Muhammad UsamaNessuna valutazione finora
- HV Shunt Reactor Secrets - For Protection EngineersDocumento30 pagineHV Shunt Reactor Secrets - For Protection EngineersYoussef EzatNessuna valutazione finora
- HITEC University Taxila: Power Electronics LabDocumento9 pagineHITEC University Taxila: Power Electronics LabNisar Ahmed RanaNessuna valutazione finora
- Op Amp and Transistor-Based Analog Square Wave Generator DesignDocumento10 pagineOp Amp and Transistor-Based Analog Square Wave Generator DesignAto Triyono MetroNessuna valutazione finora
- Transient Analysis of Electrical Circuits Using Runge-Kutta Method and Its ApplicationDocumento5 pagineTransient Analysis of Electrical Circuits Using Runge-Kutta Method and Its ApplicationSwati kNessuna valutazione finora
- Power Electronics LAB 1Documento21 paginePower Electronics LAB 1Mustafa MhmoodNessuna valutazione finora
- EM OscillationsDocumento6 pagineEM OscillationsHamin GilNessuna valutazione finora
- Research Paper of OscillatorsDocumento10 pagineResearch Paper of OscillatorsRam MNessuna valutazione finora
- Spectroscopy: Microwave (Rotational) Infrared (Vibrational) Raman (Rotational & Vibrational) TextsDocumento33 pagineSpectroscopy: Microwave (Rotational) Infrared (Vibrational) Raman (Rotational & Vibrational) TextsChloe KingNessuna valutazione finora
- Power Lab 2Documento10 paginePower Lab 2Mohammad Jakir HossainNessuna valutazione finora
- Step Response LABDocumento6 pagineStep Response LABGanesh ThapaNessuna valutazione finora
- Frequency Multipilier Using A Charge-Storage Diode in An Inductive CircuitDocumento2 pagineFrequency Multipilier Using A Charge-Storage Diode in An Inductive CircuitharishkumarsinghNessuna valutazione finora
- Experiment 1-Analog Diode Application CircuitsDocumento8 pagineExperiment 1-Analog Diode Application Circuitsnaim yuslieNessuna valutazione finora
- Ac Circuits InhouseDocumento74 pagineAc Circuits InhouseRenzo GrafiloNessuna valutazione finora
- CathodyneDocumento20 pagineCathodyneEstênio Xavier VarjãoNessuna valutazione finora
- Post Lab Report 2Documento7 paginePost Lab Report 2LabibNessuna valutazione finora
- Analysis of RC, RL, RLC Series Circuits and Verification of KVL in RLC Series CircuitDocumento14 pagineAnalysis of RC, RL, RLC Series Circuits and Verification of KVL in RLC Series CircuitRafin RaffatNessuna valutazione finora
- R-L & R-C CircuitsDocumento41 pagineR-L & R-C CircuitsAlamgir Kabir ShuvoNessuna valutazione finora
- Oscillators & Applications LongstreetDocumento4 pagineOscillators & Applications Longstreetnapoleon_velasc3617Nessuna valutazione finora
- Analysis of Aeolian Vibration On Transmission LineDocumento7 pagineAnalysis of Aeolian Vibration On Transmission LineameypnNessuna valutazione finora
- Inductive Reactance (In RL Circuits) : FALL2020: CNET219Documento6 pagineInductive Reactance (In RL Circuits) : FALL2020: CNET219liam butlerNessuna valutazione finora
- Electrical EngineeringDocumento58 pagineElectrical EngineeringNor Syahirah MohamadNessuna valutazione finora
- Comsats University Islamabad, Islamabad Campus: Lab Report # 12Documento3 pagineComsats University Islamabad, Islamabad Campus: Lab Report # 12Armaghan AbidiNessuna valutazione finora
- مختبر الالكترونيك شبكات & معلوماتDocumento16 pagineمختبر الالكترونيك شبكات & معلوماتaddfgh177Nessuna valutazione finora
- 1091 Circuit Theory HW1 Solution: Tera T Giga G (Femto FDocumento5 pagine1091 Circuit Theory HW1 Solution: Tera T Giga G (Femto F曾燒餅Nessuna valutazione finora
- Lab 1 Electrical MeasurementsDocumento8 pagineLab 1 Electrical MeasurementsHasib Amir0% (1)
- Untitled PDFDocumento10 pagineUntitled PDFmukeshNessuna valutazione finora
- Electrical Engineering DepartmentDocumento10 pagineElectrical Engineering DepartmentNicoNessuna valutazione finora
- 3 Impatt DiodesDocumento5 pagine3 Impatt DiodesEduardo FuentesNessuna valutazione finora
- PROJECT BASED LEARNING Lab 11Documento8 paginePROJECT BASED LEARNING Lab 11MinalNessuna valutazione finora
- Qwitt Diode AnalysisDocumento19 pagineQwitt Diode AnalysisAghna Tiyas MandalNessuna valutazione finora
- Lecture 1Documento8 pagineLecture 1none. xNessuna valutazione finora
- Inverter 2002Documento54 pagineInverter 2002Sandro MoreroNessuna valutazione finora
- Experiment 2 BJT SwitchDocumento6 pagineExperiment 2 BJT Switchprop_kcp50% (2)
- Section 2: Power System Mathematics and Physics, Three-Phase, Power FactorDocumento65 pagineSection 2: Power System Mathematics and Physics, Three-Phase, Power FactorKhuram TabassomNessuna valutazione finora
- Circuits 2 Laboratory L31A: ScoreDocumento20 pagineCircuits 2 Laboratory L31A: ScoreNicoNessuna valutazione finora
- Experiment No. 1: ObjectiveDocumento9 pagineExperiment No. 1: ObjectiveNitin RajputNessuna valutazione finora
- Exp3 (Ac Series)Documento2 pagineExp3 (Ac Series)Deepankar Synthesizer Playist DspNessuna valutazione finora
- Pee Lab ManualDocumento77 paginePee Lab ManualRajendraTuraka100% (1)
- Experiment 2Documento6 pagineExperiment 2aira100% (1)
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Da EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Nessuna valutazione finora
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Da EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Nessuna valutazione finora
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesDa EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesValutazione: 4.5 su 5 stelle4.5/5 (7)
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Da EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Valutazione: 3 su 5 stelle3/5 (2)
- Modern Electrical Installation for Craft StudentsDa EverandModern Electrical Installation for Craft StudentsValutazione: 4.5 su 5 stelle4.5/5 (4)
- Eddy Current SpecificationsDocumento7 pagineEddy Current SpecificationsBhavani PrasadNessuna valutazione finora
- Visual Inspection Procedure Gas Pipeline Abu Humos/ El Nobaria 42" Diameter & 65 KM LengthDocumento7 pagineVisual Inspection Procedure Gas Pipeline Abu Humos/ El Nobaria 42" Diameter & 65 KM LengthBhavani Prasad100% (1)
- ECT of Ferro Mag TubesDocumento2 pagineECT of Ferro Mag TubesBhavani PrasadNessuna valutazione finora
- Pressure Vessel RT TestDocumento3 paginePressure Vessel RT TestBhavani PrasadNessuna valutazione finora
- Pressure Vessel HeadsDocumento3 paginePressure Vessel HeadsBhavani PrasadNessuna valutazione finora
- One-Day Intensive Training On "Welding Metallurgy For Engineers"Documento2 pagineOne-Day Intensive Training On "Welding Metallurgy For Engineers"Bhavani PrasadNessuna valutazione finora
- Pressure Plate MaterialDocumento5 paginePressure Plate MaterialBhavani PrasadNessuna valutazione finora
- YVL E.3e PDFDocumento62 pagineYVL E.3e PDFBhavani PrasadNessuna valutazione finora
- Pressure Vessel Inspection 01Documento9 paginePressure Vessel Inspection 01Bhavani PrasadNessuna valutazione finora
- TPI For Pressure VesselDocumento10 pagineTPI For Pressure VesselBhavani Prasad100% (2)
- Carrier Chart Psychometric ChartDocumento2 pagineCarrier Chart Psychometric Chartletmez90% (10)
- 01 - Cryogenics - NakaiDocumento63 pagine01 - Cryogenics - NakaiNest RamnarongNessuna valutazione finora
- Introduction To Reactor DesignDocumento44 pagineIntroduction To Reactor DesignRodolfoSottoJr.100% (1)
- FireSmoke Control Stair PressurizationDocumento10 pagineFireSmoke Control Stair PressurizationMohamed AsifNessuna valutazione finora
- (Total 1 Mark) : IB Questionbank Physics 1Documento5 pagine(Total 1 Mark) : IB Questionbank Physics 1Irwansyah RamadhaniNessuna valutazione finora
- 18 Tugas 2 KesetimbanganFasa Ch.4Documento11 pagine18 Tugas 2 KesetimbanganFasa Ch.4Febryan CaesarNessuna valutazione finora
- Mechanics EBook - Strain Gages and Strain RosetteDocumento2 pagineMechanics EBook - Strain Gages and Strain Rosettesahnis aslamNessuna valutazione finora
- NIT Manipur Syllabus PDFDocumento11 pagineNIT Manipur Syllabus PDFzilangamba_s4535Nessuna valutazione finora
- IBR Thickness CalculationDocumento18 pagineIBR Thickness Calculationreach_arindomNessuna valutazione finora
- DistillationDocumento14 pagineDistillationHưng ChánhNessuna valutazione finora
- (PAPER) Janbu N. (1985) Soil Models in Offshore Engineerin - Geot.1985.35.3.241Documento41 pagine(PAPER) Janbu N. (1985) Soil Models in Offshore Engineerin - Geot.1985.35.3.241O S100% (1)
- Criteria For Gas-Lift StabilityDocumento5 pagineCriteria For Gas-Lift StabilityAhmed MamdouhNessuna valutazione finora
- Isa 65X65X6Documento2 pagineIsa 65X65X6Mahesh Kumar0% (1)
- Multiple Choice Questions For EarthDocumento5 pagineMultiple Choice Questions For EarthShaukat Ali KhanNessuna valutazione finora
- Ultrasonic Testing of Materials 124Documento1 paginaUltrasonic Testing of Materials 124joNessuna valutazione finora
- Home Previous View: Dimensions Performance SpecificationDocumento0 pagineHome Previous View: Dimensions Performance SpecificationmohdnazirNessuna valutazione finora
- Thermodynamics CH12Documento23 pagineThermodynamics CH12Rishab SharmaNessuna valutazione finora
- Bolted Connection Angle Brace TensionDocumento2 pagineBolted Connection Angle Brace TensionRajib MaharjanNessuna valutazione finora
- Ijce - Base Isolation Technique For Design of Earthquake Resistant StructuresDocumento6 pagineIjce - Base Isolation Technique For Design of Earthquake Resistant Structuresiaset123Nessuna valutazione finora
- CPP - Phase 03 (Fluid)Documento2 pagineCPP - Phase 03 (Fluid)surya pratapNessuna valutazione finora
- Bfc20903 Chapter 1 NewDocumento44 pagineBfc20903 Chapter 1 Newhamierul mohamadNessuna valutazione finora
- Mec32 Notes PDFDocumento60 pagineMec32 Notes PDFChristiana Mae Padilla0% (1)
- 02 Phase DiagramsDocumento24 pagine02 Phase DiagramsPalash SwarnakarNessuna valutazione finora
- B) Back Pressure Steam TurbineDocumento8 pagineB) Back Pressure Steam TurbineHamza TariqNessuna valutazione finora
- CBE 362L 1 Double PipeDocumento8 pagineCBE 362L 1 Double PipeDodOng GwapoNessuna valutazione finora
- Kisssoft Tutorial 14 Compression SpringsDocumento11 pagineKisssoft Tutorial 14 Compression SpringsNguyễnVănLăngNessuna valutazione finora
- Fine Blanking - Literature SurveyDocumento8 pagineFine Blanking - Literature Surveysickman100% (1)
- Thermodynamic Model of The Urea Synthesis Process: Alexey L. Voskov and Gennady F. VoroninDocumento13 pagineThermodynamic Model of The Urea Synthesis Process: Alexey L. Voskov and Gennady F. VoroninGrinder Hernan Rojas UrcohuarangaNessuna valutazione finora
- Parker TB Series MotorsDocumento28 pagineParker TB Series Motorsccorp0089Nessuna valutazione finora
- Design Philosophy, Tension Member Design L2V1Documento37 pagineDesign Philosophy, Tension Member Design L2V1November RainNessuna valutazione finora