Potrebbero piacerti anche
- Physics For Entertainment Volume 1 (Yakov Perelman)Documento211 paginePhysics For Entertainment Volume 1 (Yakov Perelman)snath7800Nessuna valutazione finora
- Data Assigment 1Documento32 pagineData Assigment 1Sukhwinder Kaur100% (1)
- Refrigerador Haier Service Manual Mother ModelDocumento32 pagineRefrigerador Haier Service Manual Mother Modelnibble1974100% (1)
- PLC Omron BasicDocumento19 paginePLC Omron BasicnorbipmmNessuna valutazione finora
- Powerfactory 2020: Technical ReferenceDocumento13 paginePowerfactory 2020: Technical ReferenceDaniel ManjarresNessuna valutazione finora
- RENAULT Quality PlanningDocumento20 pagineRENAULT Quality PlanningEhsan ArbabtaftiNessuna valutazione finora
- Blockchain Unconfirmed Transaction Hack Script Docx PDF FreeDocumento2 pagineBlockchain Unconfirmed Transaction Hack Script Docx PDF FreeHealing Relaxing Sleep Music100% (1)
- SOP's For All Digital Marketing ActivitesDocumento3 pagineSOP's For All Digital Marketing ActivitesSavijeet Singh50% (2)
- CO2 Production PlantsDocumento4 pagineCO2 Production PlantsBoojie Recto100% (1)
- Fuzzy System Modeling Algorithm for Data Analysis and Approximate ReasoningDocumento8 pagineFuzzy System Modeling Algorithm for Data Analysis and Approximate ReasoningVirat KumarNessuna valutazione finora
- A Self-Leaning Fuzzy Logic Controller Using Genetic Algorithm With ReinforcementsDocumento8 pagineA Self-Leaning Fuzzy Logic Controller Using Genetic Algorithm With Reinforcementsvinodkumar57Nessuna valutazione finora
- TSK Fuzzy Function ApproximatorsDocumento11 pagineTSK Fuzzy Function ApproximatorsAdam KliberNessuna valutazione finora
- Rule-Base Structure Identification in An Adaptive-Network-Based Fuzzy Inference System PDFDocumento10 pagineRule-Base Structure Identification in An Adaptive-Network-Based Fuzzy Inference System PDFOualid LamraouiNessuna valutazione finora
- Paper On Speech Estimation Using Fuzzy Logic Inferencing: AuthorsDocumento14 paginePaper On Speech Estimation Using Fuzzy Logic Inferencing: Authorsbalak88Nessuna valutazione finora
- ANFIS: Adaptive Neuro-Fuzzy Inference System ModelingDocumento21 pagineANFIS: Adaptive Neuro-Fuzzy Inference System ModelingarellanoruizNessuna valutazione finora
- Learning Fuzzy Rules With Evolutionary Algorithms - An Analytic ApproachDocumento10 pagineLearning Fuzzy Rules With Evolutionary Algorithms - An Analytic ApproachRanjana SodhiNessuna valutazione finora
- Comparative Study On Uncertain Knowledge Based FrameworksDocumento6 pagineComparative Study On Uncertain Knowledge Based FrameworksInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- A New Conjugate Gradient Method For Learning Fuzzy Neural Networks (#852212) - 1483473Documento13 pagineA New Conjugate Gradient Method For Learning Fuzzy Neural Networks (#852212) - 1483473هشام محمد خضرNessuna valutazione finora
- FUZZY PREDICTIVE MODELLING USING HIERARCHICAL CLUSTERING AND - 2007 - IFAC ProceDocumento6 pagineFUZZY PREDICTIVE MODELLING USING HIERARCHICAL CLUSTERING AND - 2007 - IFAC ProcesmeykelNessuna valutazione finora
- Fuzzy System Modeling by Fuzzy Partition and GA Hybrid SchemesDocumento10 pagineFuzzy System Modeling by Fuzzy Partition and GA Hybrid SchemesOctavio AsNessuna valutazione finora
- EASY-FIT: A Software System For Data Fitting in Dynamic SystemsDocumento35 pagineEASY-FIT: A Software System For Data Fitting in Dynamic SystemssansansansaniaNessuna valutazione finora
- A Table Lookup Scheme For Fuzzy Logic Based Model Identification Applied To Time Series PredictionDocumento8 pagineA Table Lookup Scheme For Fuzzy Logic Based Model Identification Applied To Time Series PredictionArifaldy SatriadiNessuna valutazione finora
- Fuzzy K-NN & Fuzzy Back PropagationDocumento7 pagineFuzzy K-NN & Fuzzy Back PropagationInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Thesis Chapter 7Documento6 pagineThesis Chapter 7junifelmatilacNessuna valutazione finora
- A Neural Approach of Multimodel Representation of Complex ProcessesDocumento12 pagineA Neural Approach of Multimodel Representation of Complex ProcessesssfofoNessuna valutazione finora
- Comparing Exact and Heuristic Algorithms for Optimization ProblemsDocumento10 pagineComparing Exact and Heuristic Algorithms for Optimization ProblemscruzreyeslauraNessuna valutazione finora
- Bov Air Kieras Polson 1990Documento48 pagineBov Air Kieras Polson 1990Alina PartenieNessuna valutazione finora
- Fuzzy Meta-Rules for Flexible Inference ControlDocumento11 pagineFuzzy Meta-Rules for Flexible Inference ControlSenaNessuna valutazione finora
- An Overview of Advances of Pattern Recognition Systems in Computer VisionDocumento27 pagineAn Overview of Advances of Pattern Recognition Systems in Computer VisionHoang LMNessuna valutazione finora
- Design Methodology of Fuzzy Logic Control: Henry NasutionDocumento15 pagineDesign Methodology of Fuzzy Logic Control: Henry Nasutionteknikpembakaran2013Nessuna valutazione finora
- Rapid Prototyping of Fuzzy Rule-Based Models Using Fuzzy ClusteringDocumento11 pagineRapid Prototyping of Fuzzy Rule-Based Models Using Fuzzy ClusteringAli Umair KhanNessuna valutazione finora
- Online Estimation of Stochastic Volatily For Asset Returns: Ivette Luna and Rosangela BalliniDocumento7 pagineOnline Estimation of Stochastic Volatily For Asset Returns: Ivette Luna and Rosangela BalliniIvetteNessuna valutazione finora
- 1 s2.0 S0167278920300026 MainDocumento11 pagine1 s2.0 S0167278920300026 MainJuan ZarateNessuna valutazione finora
- Pareto-Based Multiobjective Machine Learning: An Overview and Case StudiesDocumento19 paginePareto-Based Multiobjective Machine Learning: An Overview and Case Studiesdexxt0rNessuna valutazione finora
- Future Directions for Graph Matching Using EDAsDocumento4 pagineFuture Directions for Graph Matching Using EDAschintanpNessuna valutazione finora
- Particle Swarm Optimization Approach For Fuzzy Cognitive Maps Applied To Autism ClassificationDocumento11 pagineParticle Swarm Optimization Approach For Fuzzy Cognitive Maps Applied To Autism ClassificationHarjitNessuna valutazione finora
- Optimal State Estimation For Stochastic Systems: An Information Theoretic ApproachDocumento15 pagineOptimal State Estimation For Stochastic Systems: An Information Theoretic ApproachJanett TrujilloNessuna valutazione finora
- Analysis of Time Series Rule Extraction Techniques: Hima Suresh, Dr. Kumudha RaimondDocumento6 pagineAnalysis of Time Series Rule Extraction Techniques: Hima Suresh, Dr. Kumudha RaimondInternational Organization of Scientific Research (IOSR)Nessuna valutazione finora
- Chapter-1 Mathematical ModellingDocumento4 pagineChapter-1 Mathematical Modellingtekalign yerangoNessuna valutazione finora
- ANN Training: A Survey of Classical & Soft Computing ApproachesDocumento22 pagineANN Training: A Survey of Classical & Soft Computing ApproachesIsabelle El HajjNessuna valutazione finora
- Best Generalisation Error PDFDocumento28 pagineBest Generalisation Error PDFlohit12Nessuna valutazione finora
- Literature Survey On Genetic Algorithm Approach For Fuzzy Rule-Based SystemDocumento4 pagineLiterature Survey On Genetic Algorithm Approach For Fuzzy Rule-Based SystemEditorijer IjerNessuna valutazione finora
- Modelling The Runtime of The Gaussian Computational Chemistry Application and Assessing The Impacts of Microarchitectural VariationsDocumento11 pagineModelling The Runtime of The Gaussian Computational Chemistry Application and Assessing The Impacts of Microarchitectural Variationselias antonio bello leonNessuna valutazione finora
- Generalized Swarm Intelligence Algorithms With Domain-Specific HeuristicsDocumento9 pagineGeneralized Swarm Intelligence Algorithms With Domain-Specific HeuristicsIAES IJAINessuna valutazione finora
- Active Learning For Multi-Task Adaptive FilteringDocumento8 pagineActive Learning For Multi-Task Adaptive FilteringZhiqian LuNessuna valutazione finora
- Formal Verification Using Model CheckingDocumento5 pagineFormal Verification Using Model CheckingUsername NameNessuna valutazione finora
- Genetic Algorithms For Optimum Designing of Fuzzy ControllersDocumento6 pagineGenetic Algorithms For Optimum Designing of Fuzzy ControllersLukas NurHappyNessuna valutazione finora
- Recursive and Residual Algorithms For The Efficient Numerical Integration of Multi-Body SystemsDocumento31 pagineRecursive and Residual Algorithms For The Efficient Numerical Integration of Multi-Body SystemsCleves AxiomaNessuna valutazione finora
- Exact Meta Optimization CombinationDocumento13 pagineExact Meta Optimization CombinationcsmateNessuna valutazione finora
- Analysis of Intelligent System Design by Neuro Adaptive ControlDocumento11 pagineAnalysis of Intelligent System Design by Neuro Adaptive ControlIAEME PublicationNessuna valutazione finora
- Effects of Multi-Objective Genetic Rule Selection On Short-Term Load Forecasting For Anomalous DaysDocumento7 pagineEffects of Multi-Objective Genetic Rule Selection On Short-Term Load Forecasting For Anomalous DayssunitharajababuNessuna valutazione finora
- Integration of Fuzzy Shannon's Entropy With Fuzzy TOPSIS For Industrial Robotic System SelectionDocumento13 pagineIntegration of Fuzzy Shannon's Entropy With Fuzzy TOPSIS For Industrial Robotic System SelectionHadiBiesNessuna valutazione finora
- Mathematical Introduction To Deep Learning: Methods, Implementations, and TheoryDocumento601 pagineMathematical Introduction To Deep Learning: Methods, Implementations, and TheoryShaon SutradharNessuna valutazione finora
- ANNMathDocumento104 pagineANNMathJose Maria Arjona CaballeroNessuna valutazione finora
- Adaptive Cooperative Fuzzy Logic Controller: Justin Ammerlaan David WrightDocumento9 pagineAdaptive Cooperative Fuzzy Logic Controller: Justin Ammerlaan David Wrightmenilanjan89nLNessuna valutazione finora
- Neuro-Fuzzy Methods For Nonlinear System IdentificationDocumento13 pagineNeuro-Fuzzy Methods For Nonlinear System IdentificationboopsubhaNessuna valutazione finora
- Assignment #1: Part Time Reseach Scholar Thamirabharani Engineering CollegeDocumento17 pagineAssignment #1: Part Time Reseach Scholar Thamirabharani Engineering CollegeV ArunachalamNessuna valutazione finora
- Estimating The Brazilian Central Bank's Reaction Function by Fuzzy Inference SystemDocumento10 pagineEstimating The Brazilian Central Bank's Reaction Function by Fuzzy Inference SystemilunahNessuna valutazione finora
- Evaluating The Performance of Adaptive Gaining-Sharing Knowledge Based Algorithm On CEC 2020 Benchmark ProblemsDocumento8 pagineEvaluating The Performance of Adaptive Gaining-Sharing Knowledge Based Algorithm On CEC 2020 Benchmark ProblemsAli WagdyNessuna valutazione finora
- Generic Models For Engineering Methods of Diverse DomainsDocumento14 pagineGeneric Models For Engineering Methods of Diverse DomainsZoric BobbyNessuna valutazione finora
- Generalized Fuzzy Clustering ModelDocumento11 pagineGeneralized Fuzzy Clustering ModelPriyanka AlisonNessuna valutazione finora
- Numerical Optimization Using Computer Experiments: Nasa Contractor 201724Documento22 pagineNumerical Optimization Using Computer Experiments: Nasa Contractor 201724thecriticNessuna valutazione finora
- Multiphysics Modeling and Optimization of Mechatronic Multibody SystemsDocumento29 pagineMultiphysics Modeling and Optimization of Mechatronic Multibody SystemsaesotaerikNessuna valutazione finora
- Modified Gath-Geva Fuzzy Clustering For Identifica PDFDocumento18 pagineModified Gath-Geva Fuzzy Clustering For Identifica PDFMauludin RahmanNessuna valutazione finora
- C. Cifarelli Et Al - Incremental Classification With Generalized EigenvaluesDocumento25 pagineC. Cifarelli Et Al - Incremental Classification With Generalized EigenvaluesAsvcxvNessuna valutazione finora
- Basic Sens Analysis Review PDFDocumento26 pagineBasic Sens Analysis Review PDFPratik D UpadhyayNessuna valutazione finora
- 2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsDocumento10 pagine2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsMohamed Hechmi JERIDINessuna valutazione finora
- Sensors: Metaheuristic Based Scheduling Meta-Tasks in Distributed Heterogeneous Computing SystemsDocumento12 pagineSensors: Metaheuristic Based Scheduling Meta-Tasks in Distributed Heterogeneous Computing SystemsalkimistuNessuna valutazione finora
- Artificial Intelligence Diagnosis: Fundamentals and ApplicationsDa EverandArtificial Intelligence Diagnosis: Fundamentals and ApplicationsNessuna valutazione finora
- A Developer S Insight Into ARM Cortex M DebuggingDocumento7 pagineA Developer S Insight Into ARM Cortex M DebuggingravigobiNessuna valutazione finora
- Analyzing HardFaults On Cortex-M CPUDocumento12 pagineAnalyzing HardFaults On Cortex-M CPUravigobiNessuna valutazione finora
- Which ARM Cortex Core Is Right For Your ApplicationDocumento5 pagineWhich ARM Cortex Core Is Right For Your ApplicationS_gabrielNessuna valutazione finora
- Bibliographic Guide - Vedic TextsDocumento35 pagineBibliographic Guide - Vedic TextsravigobiNessuna valutazione finora
- Research 1Documento14 pagineResearch 1Neil KhoslaNessuna valutazione finora
- Audio On ARM Cortex-M ProcessorsDocumento5 pagineAudio On ARM Cortex-M ProcessorsravigobiNessuna valutazione finora
- Based On The Stm32 GSM Intelligent Home Control System DesignDocumento3 pagineBased On The Stm32 GSM Intelligent Home Control System DesignravigobiNessuna valutazione finora
- Distributed Tree KernelsDocumento8 pagineDistributed Tree KernelsravigobiNessuna valutazione finora
- Big O NotationDocumento7 pagineBig O NotationlawlietNessuna valutazione finora
- Health ScopeDocumento4 pagineHealth ScoperavigobiNessuna valutazione finora
- The Vedas Say They MUST Be Shared With Everyone: by Stephen KnappDocumento8 pagineThe Vedas Say They MUST Be Shared With Everyone: by Stephen Knappdoors-and-windowsNessuna valutazione finora
- Machine Learning Algorithms For ClassificationDocumento92 pagineMachine Learning Algorithms For ClassificationravigobiNessuna valutazione finora
- Verification As Learning Geometric ConceptsDocumento23 pagineVerification As Learning Geometric ConceptsravigobiNessuna valutazione finora
- Online Ensemble LearningDocumento42 pagineOnline Ensemble LearningravigobiNessuna valutazione finora
- Large-Scale Machine Learning With Stochastic Gradient Descent PDFDocumento10 pagineLarge-Scale Machine Learning With Stochastic Gradient Descent PDFravigobiNessuna valutazione finora
- Streaming Linear Regression On Spark MLlib and MOADocumento4 pagineStreaming Linear Regression On Spark MLlib and MOAravigobiNessuna valutazione finora
- A Comparative Runtime Analysis of Heuristic AlgorithmsDocumento18 pagineA Comparative Runtime Analysis of Heuristic AlgorithmsravigobiNessuna valutazione finora
- Factorial Hidden Markov ModelsDocumento31 pagineFactorial Hidden Markov ModelsravigobiNessuna valutazione finora
- Speeding Up Greedy Forward Selection For Regularized Least-SquaresDocumento6 pagineSpeeding Up Greedy Forward Selection For Regularized Least-SquaresravigobiNessuna valutazione finora
- MPI For Big DataDocumento14 pagineMPI For Big DataravigobiNessuna valutazione finora
- Text Classification Using Machine Learning TechniquesDocumento9 pagineText Classification Using Machine Learning TechniquesravigobiNessuna valutazione finora
- Support Vector Machine Solvers PDFDocumento27 pagineSupport Vector Machine Solvers PDFravigobiNessuna valutazione finora
- The Worst-Case Time Complexity For Generating All Maximal Cliques and Computational ExperimentsDocumento15 pagineThe Worst-Case Time Complexity For Generating All Maximal Cliques and Computational ExperimentsravigobiNessuna valutazione finora
- Computational Complexity of The XCS Classifier SystemDocumento35 pagineComputational Complexity of The XCS Classifier SystemravigobiNessuna valutazione finora
- Spark On Hadoop Vs MPI OpenMP On BeowulfDocumento10 pagineSpark On Hadoop Vs MPI OpenMP On BeowulfravigobiNessuna valutazione finora
- Is Inductive Machine Learning Just Another Wild GooseDocumento24 pagineIs Inductive Machine Learning Just Another Wild GooseravigobiNessuna valutazione finora
- Towards An Analytic Framework For Analysing The Computation Time of Evolutionary AlgorithmsDocumento39 pagineTowards An Analytic Framework For Analysing The Computation Time of Evolutionary AlgorithmsravigobiNessuna valutazione finora
- Time and Space Complexity ImprovementsDocumento10 pagineTime and Space Complexity ImprovementsravigobiNessuna valutazione finora
- Big O NotationsDocumento19 pagineBig O NotationsravigobiNessuna valutazione finora
- Polynomial Time Algorithm For Learning Globally Optimal Dynamic Bayesian NetworkDocumento11 paginePolynomial Time Algorithm For Learning Globally Optimal Dynamic Bayesian NetworkravigobiNessuna valutazione finora
- Project PBLDocumento19 pagineProject PBLAdam LuqmanNessuna valutazione finora
- Delphi Temp SensorDocumento2 pagineDelphi Temp SensorAlways Super Gaming vatsal GehlotNessuna valutazione finora
- CM-4G-GPS Quick Guide: Short Guide How To Start Using CM-GPRS ModuleDocumento4 pagineCM-4G-GPS Quick Guide: Short Guide How To Start Using CM-GPRS Modulezakki ahmadNessuna valutazione finora
- UNAVCO 2008 LiDAR Campaign Processing ReportDocumento23 pagineUNAVCO 2008 LiDAR Campaign Processing ReportLina Xiomara SierraNessuna valutazione finora
- DBA Roles and ResponsibilitiesDocumento2 pagineDBA Roles and ResponsibilitiesMahesh Babu Sri100% (2)
- Skripsi #2 Tanpa HyperlinkDocumento19 pagineSkripsi #2 Tanpa HyperlinkindahNessuna valutazione finora
- Nms5Lx 6.6.1: User ManualDocumento590 pagineNms5Lx 6.6.1: User ManualGentjan ZogaNessuna valutazione finora
- Statistical Properties of Population Stability IndexDocumento60 pagineStatistical Properties of Population Stability IndexВячеславNessuna valutazione finora
- Recent Updates For The Heat Transfer Solver in Ls Dyna R With Focus On Computational Welding MechanicsDocumento14 pagineRecent Updates For The Heat Transfer Solver in Ls Dyna R With Focus On Computational Welding MechanicsamitkmrjNessuna valutazione finora
- Guide For Dynamic Report Generator - EndsfsdfsdfsdfsdfDocumento15 pagineGuide For Dynamic Report Generator - Endsfsdfsdfsdfsdfmtech structuresNessuna valutazione finora
- Same Denominator or Numerator Worksheet 1Documento2 pagineSame Denominator or Numerator Worksheet 1Jenny KimNessuna valutazione finora
- RP50130 RTC 475 FS RP Production Tracking ReportDocumento16 pagineRP50130 RTC 475 FS RP Production Tracking Reportravi4920Nessuna valutazione finora
- ContentServer PDFDocumento16 pagineContentServer PDFdaniel leon marinNessuna valutazione finora
- Ecen 326 - Lab 2 ReportDocumento7 pagineEcen 326 - Lab 2 Reportapi-241454978Nessuna valutazione finora
- Bandura Et Al.Documento16 pagineBandura Et Al.Siddhant JhawarNessuna valutazione finora
- Xy6112 EtcDocumento4 pagineXy6112 EtcJalal AsadianNessuna valutazione finora
- ES Q2 Mod8Documento26 pagineES Q2 Mod8maacovsNessuna valutazione finora
- Problem Set 3 NonparaDocumento3 pagineProblem Set 3 NonparaRhia Mae TeporaNessuna valutazione finora
- ZIEHL ABEGG Main Catalogue Centrifugal Fans With IEC Standard MotoDocumento285 pagineZIEHL ABEGG Main Catalogue Centrifugal Fans With IEC Standard MotoTomislav BrezicNessuna valutazione finora
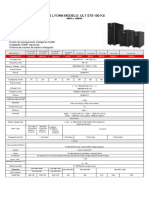
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocumento1 paginaUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzNessuna valutazione finora
- Swat Luu: User ManualDocumento13 pagineSwat Luu: User ManualgjferreiraNessuna valutazione finora