Potrebbero piacerti anche
- Criterio de Suprimento v2Documento65 pagineCriterio de Suprimento v2Drik SullesNessuna valutazione finora
- Atividade 1Documento3 pagineAtividade 1Drik SullesNessuna valutazione finora
- DANFE - NFE DevoluçãoDocumento1 paginaDANFE - NFE DevoluçãoDrik SullesNessuna valutazione finora
- Módulo 15.4Documento27 pagineMódulo 15.4Drik SullesNessuna valutazione finora
- Memorial Descritivo - Geração DistribuidaDocumento2 pagineMemorial Descritivo - Geração DistribuidaDrik SullesNessuna valutazione finora
- Prova PDFDocumento3 pagineProva PDFDrik SullesNessuna valutazione finora
- 13 Dimensionamento e Viabilidade de Sistema FotovoltaicoDocumento6 pagine13 Dimensionamento e Viabilidade de Sistema FotovoltaicoDrik SullesNessuna valutazione finora
- Atividade ResolvidaDocumento2 pagineAtividade ResolvidaDrik SullesNessuna valutazione finora
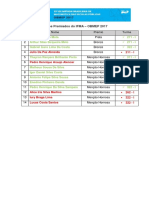
- Relaçao de Premiados Por Campus - ImperatrizDocumento2 pagineRelaçao de Premiados Por Campus - ImperatrizDrik SullesNessuna valutazione finora
- Provas de Língua Portuguesa e Eletricidade do Exame de Admissão ao Estágio de Adaptação à Graduação de Sargento - Modalidade BDocumento12 pagineProvas de Língua Portuguesa e Eletricidade do Exame de Admissão ao Estágio de Adaptação à Graduação de Sargento - Modalidade BDrik SullesNessuna valutazione finora
- Memorial Descritivo - Geração DistribuidaDocumento2 pagineMemorial Descritivo - Geração DistribuidaDrik SullesNessuna valutazione finora
- Controle e Observabilidade de Sistemas DinâmicosDocumento10 pagineControle e Observabilidade de Sistemas DinâmicosDeborah S. FructuosoNessuna valutazione finora
- 2013 - Desempenho de Lógicas de Controle para o Ajuste Automático Do PH Da Água Utilizada em MicroirrigaçãoDocumento13 pagine2013 - Desempenho de Lógicas de Controle para o Ajuste Automático Do PH Da Água Utilizada em MicroirrigaçãoademargcjuniorNessuna valutazione finora
- Pontos sobre pontuaçãoDocumento28 paginePontos sobre pontuaçãoDrik SullesNessuna valutazione finora
- Premiação - OBMEP 2017Documento1 paginaPremiação - OBMEP 2017Drik SullesNessuna valutazione finora
- Sistema de Controle de Temperatura e Umi PDFDocumento8 pagineSistema de Controle de Temperatura e Umi PDFDrik SullesNessuna valutazione finora
- Instituto Federal de EducaçãoDocumento6 pagineInstituto Federal de EducaçãoDrik SullesNessuna valutazione finora
- Sistema de Controle de Temperatura e Umi PDFDocumento8 pagineSistema de Controle de Temperatura e Umi PDFDrik SullesNessuna valutazione finora
- Anarede Primeiros Passo GraficoDocumento19 pagineAnarede Primeiros Passo Graficojeffersonc61Nessuna valutazione finora
- Edital 037-2017 Estagio Internacional 2017 FAPEMADocumento9 pagineEdital 037-2017 Estagio Internacional 2017 FAPEMADrik SullesNessuna valutazione finora
- Manual Fuzzy Matlab PDFDocumento46 pagineManual Fuzzy Matlab PDFkleibertsNessuna valutazione finora
- Livro de Cantos Do Festejo de São Francisco 2015Documento16 pagineLivro de Cantos Do Festejo de São Francisco 2015Drik Sulles100% (3)
- 2.01 Luminotecnica e Lampadas Eletricas (Apostila)Documento60 pagine2.01 Luminotecnica e Lampadas Eletricas (Apostila)alessio.rainier1179100% (1)
- Identificação de Sistemas Dinâmicos Utilizando Matlab e Arduino - 2Documento5 pagineIdentificação de Sistemas Dinâmicos Utilizando Matlab e Arduino - 2Pedro Alvaro CacauNessuna valutazione finora
- Sei3 PDFDocumento15 pagineSei3 PDFDrik SullesNessuna valutazione finora
- Artigo Sobe Posicionamento Solar Com Arduino PDFDocumento73 pagineArtigo Sobe Posicionamento Solar Com Arduino PDFDrik SullesNessuna valutazione finora
- Controle Fuzzy para IrrigaçãoDocumento120 pagineControle Fuzzy para IrrigaçãoDrik SullesNessuna valutazione finora
- Processamento de Sinai e Sistemas: Cancelador de RuidoDocumento11 pagineProcessamento de Sinai e Sistemas: Cancelador de RuidoDrik SullesNessuna valutazione finora
- Cálculo Numérico - Métodos e AplicaçõesDocumento119 pagineCálculo Numérico - Métodos e AplicaçõesSabrina Ferreira100% (3)
- Aplicações de derivadas na administração: funções marginaisDocumento27 pagineAplicações de derivadas na administração: funções marginaisNathan AlmeidaNessuna valutazione finora
- Livro de Clculo 3 Prof. Sinvaldo Gama PDFDocumento121 pagineLivro de Clculo 3 Prof. Sinvaldo Gama PDFLucas Marchetti BragaNessuna valutazione finora
- Apostila de Treinamento de Solidworks 2007 - AvançadoDocumento248 pagineApostila de Treinamento de Solidworks 2007 - Avançadovolneibs100% (1)
- Notas de Aula - Calculo Varias VariaveisDocumento287 pagineNotas de Aula - Calculo Varias VariaveisTlalocNessuna valutazione finora
- Análise Matemática I - Engenharia CivilDocumento25 pagineAnálise Matemática I - Engenharia CivilClovis'set SitoiNessuna valutazione finora
- Lista CalculoDocumento5 pagineLista CalculoSilas SantosNessuna valutazione finora
- Lista de Exercicios 1I DERIVADASDocumento10 pagineLista de Exercicios 1I DERIVADASJeferson BrazNessuna valutazione finora
- Conceito de vigaDocumento9 pagineConceito de viganearryanNessuna valutazione finora
- Métodos Numéricos para Equações Diferenciais ParciaisDocumento76 pagineMétodos Numéricos para Equações Diferenciais ParciaisBrandon SandersNessuna valutazione finora
- Exercícios Resolvidos: Derivada de Funções Trigonométricas InversasDocumento7 pagineExercícios Resolvidos: Derivada de Funções Trigonométricas InversasDiego Oliveira100% (2)
- Cálculos e propriedades de somatório para estatística básicaDocumento5 pagineCálculos e propriedades de somatório para estatística básicaHalina SallesNessuna valutazione finora
- Sequele Economia RevistoDocumento172 pagineSequele Economia RevistoOlindo NovaisNessuna valutazione finora
- Programa Matemática B 10 e 11Documento2 paginePrograma Matemática B 10 e 11Carlos GalhanoNessuna valutazione finora
- Introducao A Geometria Diferencial 2nd Ed Ketti EB 2008Documento283 pagineIntroducao A Geometria Diferencial 2nd Ed Ketti EB 2008Carlos Silva100% (1)
- Equações Diferenciais OrdináriasDocumento37 pagineEquações Diferenciais OrdináriasJosiel NashNessuna valutazione finora
- Cálculo diferencial: derivadas, regras e aplicaçõesDocumento16 pagineCálculo diferencial: derivadas, regras e aplicaçõesDeivison LimaNessuna valutazione finora
- Ficha de Trabalho 07 - 12 Ano - Derivadas e AplicacoesDocumento2 pagineFicha de Trabalho 07 - 12 Ano - Derivadas e AplicacoesJoana MirandaNessuna valutazione finora
- 1a Lista de Cálculo IIDocumento6 pagine1a Lista de Cálculo IIElias Santos SouzaNessuna valutazione finora
- Questões sobre funções e cálculo numéricoDocumento24 pagineQuestões sobre funções e cálculo numéricoGeisi OlliveiraNessuna valutazione finora
- Aproximação Linear - Aula PDFDocumento7 pagineAproximação Linear - Aula PDFErick LucasNessuna valutazione finora
- Ficha de Trabalho 5 - 12º AnoDocumento9 pagineFicha de Trabalho 5 - 12º AnoFrancisco CoelhoNessuna valutazione finora
- Plano de Ensino: ProfessoresDocumento108 paginePlano de Ensino: ProfessoresCaio PereiraNessuna valutazione finora
- Funções Hiperbólicas e DerivadasDocumento2 pagineFunções Hiperbólicas e DerivadasKawyn GMNessuna valutazione finora
- Funções VetoriaisDocumento18 pagineFunções Vetoriaisengeproduezo80% (5)
- Funções Trigonométricas InversasDocumento3 pagineFunções Trigonométricas InversasPedro VassaloNessuna valutazione finora
- Edo 2Documento280 pagineEdo 2Nicole Silva de JesusNessuna valutazione finora
- Primitivas imediatas e quase-imediatasDocumento17 paginePrimitivas imediatas e quase-imediatasSofia MarquesNessuna valutazione finora