Potrebbero piacerti anche
- TLV320AIC3104 functional block diagram and register overviewDocumento1 paginaTLV320AIC3104 functional block diagram and register overviewDenis GomezNessuna valutazione finora
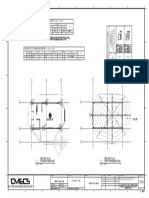
- LCD 1 DiagramDocumento2 pagineLCD 1 DiagramEdu SantanaNessuna valutazione finora
- Day2 s2 03 ArtaudDocumento13 pagineDay2 s2 03 ArtaudtameshhNessuna valutazione finora
- ST19 STB23 24bDocumento10 pagineST19 STB23 24bJONHCENA13Nessuna valutazione finora
- Pin definitions and parts names for Delta HMI serial communicationDocumento2 paginePin definitions and parts names for Delta HMI serial communicationCanek UnoNessuna valutazione finora
- Rough-Cut Capacity and Product MixDocumento4 pagineRough-Cut Capacity and Product Mixjon boyNessuna valutazione finora
- Brochure - vm21 CeDocumento6 pagineBrochure - vm21 CeSenthil KumarNessuna valutazione finora
- Ss Sa Ele 0001 Injetoras JupterDocumento8 pagineSs Sa Ele 0001 Injetoras JupterSimon Safety EngenhariaNessuna valutazione finora
- (Vibration, Thrust, Revolution, LVDT, Temperature, Process) : SeriesDocumento6 pagine(Vibration, Thrust, Revolution, LVDT, Temperature, Process) : SeriesAditya PandeyNessuna valutazione finora
- FireNet Series Battery Calculator V3.057Documento7 pagineFireNet Series Battery Calculator V3.057Rafael Contreras R.Nessuna valutazione finora
- DB-II Serial Communication ProtocolDocumento11 pagineDB-II Serial Communication ProtocoldjonycsNessuna valutazione finora
- FireNet Series Battery Calculator V3.057Documento7 pagineFireNet Series Battery Calculator V3.057Henry ComasNessuna valutazione finora
- Gyro & LOG To NMEA Converter: Model SR01-40Documento3 pagineGyro & LOG To NMEA Converter: Model SR01-40sajujohnyNessuna valutazione finora
- Computer Architecture HW #1 Program CodeDocumento7 pagineComputer Architecture HW #1 Program CodeLone Nge LayNessuna valutazione finora
- Appendix B Communication SettingsDocumento2 pagineAppendix B Communication SettingsryoNessuna valutazione finora
- CA I - Chapter 3 RISC V ProcessorDocumento100 pagineCA I - Chapter 3 RISC V ProcessorDuc ToanNessuna valutazione finora
- Samsung Np-r480 Suzhou Rev 1.0 SCHDocumento62 pagineSamsung Np-r480 Suzhou Rev 1.0 SCHJulio Cesar Dos SantosNessuna valutazione finora
- RP600 Digital Protection Relay: WWW - Mevoco.beDocumento4 pagineRP600 Digital Protection Relay: WWW - Mevoco.bePaulo RebeloNessuna valutazione finora
- A DVB-H Testbed For Wireless Billboard Channel Simulation: Zhanlin Ji, Ivan Ganchev, Máirtín O'DromaDocumento4 pagineA DVB-H Testbed For Wireless Billboard Channel Simulation: Zhanlin Ji, Ivan Ganchev, Máirtín O'DromasafaNessuna valutazione finora
- FireNET Battery Calculator Tool helps choose batteriesDocumento7 pagineFireNET Battery Calculator Tool helps choose batteriesmujahid_islam85Nessuna valutazione finora
- FFT Imp ButterflyDocumento14 pagineFFT Imp ButterflyFarhaNazneenNessuna valutazione finora
- Models and Implementation of A Dynamic Element Matching DACDocumento6 pagineModels and Implementation of A Dynamic Element Matching DACNguyen Van ToanNessuna valutazione finora
- Glamping, Deluxe, Power, MRF, Guard ST-8Documento1 paginaGlamping, Deluxe, Power, MRF, Guard ST-8engr. abet hilarioNessuna valutazione finora
- ALV2 PC-ServerSoftware Setup&MaintenanceManual1.0Documento41 pagineALV2 PC-ServerSoftware Setup&MaintenanceManual1.0harxeNessuna valutazione finora
- Mackie Hook-Up Guide: Our (In) Famous Product Hookups in Byte-Sized MorselsDocumento7 pagineMackie Hook-Up Guide: Our (In) Famous Product Hookups in Byte-Sized MorselsGe SuNessuna valutazione finora
- Cs61c 2022fa l12 Risc V Formats IIDocumento36 pagineCs61c 2022fa l12 Risc V Formats IIa11718phatNessuna valutazione finora
- Notes in Phase Shift Keying BPSK QPSKDocumento4 pagineNotes in Phase Shift Keying BPSK QPSKshanrei50% (2)
- Funcart Wiring Page3Documento1 paginaFuncart Wiring Page3UMMACHAN K JOSONNessuna valutazione finora
- RINA LV Relay Settings-11062021Documento4 pagineRINA LV Relay Settings-11062021rahul patraNessuna valutazione finora
- End Semester Practical ExamDocumento3 pagineEnd Semester Practical ExamKINGS MAN HUNTER GAMINGNessuna valutazione finora
- Upc1851 JVC OmarDocumento60 pagineUpc1851 JVC OmarAndres AlegriaNessuna valutazione finora
- Block Diagrams: This Document Can Not Be Used Without Samsung's Authorization. Samsung Electronics 8-1Documento8 pagineBlock Diagrams: This Document Can Not Be Used Without Samsung's Authorization. Samsung Electronics 8-1Nei Vinicius Hercules Rodrigues MirandaNessuna valutazione finora
- Wistron Winery N11m-Ge - Rev x01Documento91 pagineWistron Winery N11m-Ge - Rev x01art techNessuna valutazione finora
- Mitsubish Fx/Fx2N PLC Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualDocumento2 pagineMitsubish Fx/Fx2N PLC Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualryoNessuna valutazione finora
- Sigma LG Otis Di1 Si210 PCB - CompressDocumento49 pagineSigma LG Otis Di1 Si210 PCB - Compressalaa suhailNessuna valutazione finora
- DFT Hands On Nguyen PDFDocumento76 pagineDFT Hands On Nguyen PDFRicardo C100% (1)
- LC Oscillator LAB 350nmDocumento11 pagineLC Oscillator LAB 350nmMouad JaouhariNessuna valutazione finora
- Job Number Sheet AnalysisDocumento4 pagineJob Number Sheet AnalysisJONHCENA13Nessuna valutazione finora
- 07 Lzu1085306Documento6 pagine07 Lzu1085306Yusran EmNessuna valutazione finora
- CH 11Documento53 pagineCH 11moumenaahmed28Nessuna valutazione finora
- TLC 7524Documento30 pagineTLC 7524Arya KrisnaNessuna valutazione finora
- Ece141 Lec04 Introduction To Digital ModulationDocumento48 pagineEce141 Lec04 Introduction To Digital Modulation許耕立Nessuna valutazione finora
- Pioneer DJM-850: TRAKTOR SCRATCH 2 Connection GuideDocumento16 paginePioneer DJM-850: TRAKTOR SCRATCH 2 Connection GuideJean Carlo LucianiNessuna valutazione finora
- AIR 13.3 SchematicDocumento55 pagineAIR 13.3 Schematicmiriada911Nessuna valutazione finora
- H2PToday1902 - Design - TexasInstruments - Part 8Documento8 pagineH2PToday1902 - Design - TexasInstruments - Part 8Harish Kumar MNessuna valutazione finora
- Pipelined Architecture With Solutions To Data & Control HazardsDocumento37 paginePipelined Architecture With Solutions To Data & Control HazardsFehmi DenguirNessuna valutazione finora
- Autonics Mt4w-Da-4nDocumento11 pagineAutonics Mt4w-Da-4nJoc LuisNessuna valutazione finora
- New Wiring Led-ModelDocumento1 paginaNew Wiring Led-ModelvigneshNessuna valutazione finora
- Joint Equalization and LDPC Decoding: Werner Henkel, Senior Member, IEEE, Nazia S. Islam, and M. Ahmed LeghariDocumento4 pagineJoint Equalization and LDPC Decoding: Werner Henkel, Senior Member, IEEE, Nazia S. Islam, and M. Ahmed LeghariMadyha LeghariNessuna valutazione finora
- tlc7524 - 8bit DACDocumento22 paginetlc7524 - 8bit DAC40818248Nessuna valutazione finora
- D D D D D D D: DescriptionDocumento26 pagineD D D D D D D: DescriptionsirosNessuna valutazione finora
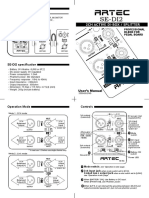
- SE DI2 Manual PDFDocumento1 paginaSE DI2 Manual PDFNavaBurgosCleverCristianNessuna valutazione finora
- Citroen C3 ECMDocumento4 pagineCitroen C3 ECMSantiago PerdomoNessuna valutazione finora
- Analog Electronics: Op-Amp Circuits and Active FiltersDocumento43 pagineAnalog Electronics: Op-Amp Circuits and Active FiltersSin SideNessuna valutazione finora
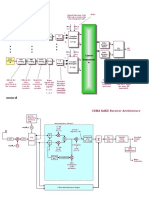
- I C Bus-Compatible Us Mts Processing Lsi: FeaturesDocumento63 pagineI C Bus-Compatible Us Mts Processing Lsi: FeaturesLeonardo Scarpati de QueirozNessuna valutazione finora
- TV Sound Processor: FeaturesDocumento27 pagineTV Sound Processor: FeaturesrolandseNessuna valutazione finora
- Tri-level DAC Design Improves Dynamic PerformanceDocumento4 pagineTri-level DAC Design Improves Dynamic PerformanceNguyen Van ToanNessuna valutazione finora
- Wireless Installation Guide L575/L655/L656Documento50 pagineWireless Installation Guide L575/L655/L656Ako CSir ArtBeracuteNessuna valutazione finora
- Visa Aplication Form FarihaDocumento2 pagineVisa Aplication Form FarihaShaklan EmonNessuna valutazione finora
- 1 s2.0 S1474034619306044 Main PDFDocumento13 pagine1 s2.0 S1474034619306044 Main PDFpancawawanNessuna valutazione finora
- National Sepsis Forum-2nd AnnDocumento17 pagineNational Sepsis Forum-2nd AnnWiyosa RusdiNessuna valutazione finora
- National Sepsis Forum-2nd AnnDocumento17 pagineNational Sepsis Forum-2nd AnnWiyosa RusdiNessuna valutazione finora
- Booking NYwqdqwdqwdwDocumento1 paginaBooking NYwqdqwdqwdwpancawawanNessuna valutazione finora
- Invoice2 23e23Documento2 pagineInvoice2 23e23pancawawanNessuna valutazione finora
- InduSoft - WebStudio - Datasheet 122323423Documento4 pagineInduSoft - WebStudio - Datasheet 122323423pancawawanNessuna valutazione finora
- Set Servo Angles with the Servo ControllerDocumento21 pagineSet Servo Angles with the Servo ControllerpancawawanNessuna valutazione finora
- Air-Cooled Heat Exchanger Specification SheetDocumento4 pagineAir-Cooled Heat Exchanger Specification SheetPanca KurniawanNessuna valutazione finora
- Invoice 32Documento2 pagineInvoice 32pancawawanNessuna valutazione finora
- Air-Cooled Heat Exchanger Specification SheetDocumento4 pagineAir-Cooled Heat Exchanger Specification SheetPanca KurniawanNessuna valutazione finora
- GPRS Shield GuideDocumento35 pagineGPRS Shield GuideAnonymous BkmsKXzwyKNessuna valutazione finora
- Indusoft PDFDocumento12 pagineIndusoft PDFpancawawanNessuna valutazione finora
- Gprs Shield For ArduinoDocumento7 pagineGprs Shield For ArduinoG Diego Palacios Riquelme100% (2)
- Ann Lab1Documento4 pagineAnn Lab1Budi PurnomoNessuna valutazione finora
- Air-Cooled Heat Exchanger Specification SheetDocumento4 pagineAir-Cooled Heat Exchanger Specification SheetPanca KurniawanNessuna valutazione finora
- Air-Cooled Heat Exchanger Specification SheetDocumento4 pagineAir-Cooled Heat Exchanger Specification SheetPanca KurniawanNessuna valutazione finora
- Analytical Workspace, Kinematics, and Foot Force Based Stability of Hexapod Walking RobotsDocumento156 pagineAnalytical Workspace, Kinematics, and Foot Force Based Stability of Hexapod Walking RobotspancawawanNessuna valutazione finora
- Air-Cooled Heat Exchanger Specification SheetDocumento4 pagineAir-Cooled Heat Exchanger Specification SheetPanca KurniawanNessuna valutazione finora
- WalasDocumento5 pagineWalaspancawawanNessuna valutazione finora
- Simulating The "First Steps" of A Walking Hexapod Robot: Ing. R. Woering CST 2010.075Documento81 pagineSimulating The "First Steps" of A Walking Hexapod Robot: Ing. R. Woering CST 2010.075Alina MirelaNessuna valutazione finora
- GBU8005 - GBU810: 8.0A Glass Passivated Bridge RectifierDocumento2 pagineGBU8005 - GBU810: 8.0A Glass Passivated Bridge RectifierpancawawanNessuna valutazione finora
- Maestro HexapodDocumento21 pagineMaestro HexapodPraveen YadavNessuna valutazione finora
- 82 EaDocumento6 pagine82 EapancawawanNessuna valutazione finora
- Artificial Neural Networks in Pattern Recognition: Mohammadreza Yadollahi, Ale S Proch AzkaDocumento8 pagineArtificial Neural Networks in Pattern Recognition: Mohammadreza Yadollahi, Ale S Proch AzkapancawawanNessuna valutazione finora
- Artificial Neural Networks in Pattern Recognition: Mohammadreza Yadollahi, Ale S Proch AzkaDocumento8 pagineArtificial Neural Networks in Pattern Recognition: Mohammadreza Yadollahi, Ale S Proch AzkapancawawanNessuna valutazione finora
- Advances in Machine Learning and Neural Networks: ° Research India Publications HTTP://WWW - Ijcir.infoDocumento2 pagineAdvances in Machine Learning and Neural Networks: ° Research India Publications HTTP://WWW - Ijcir.infopancawawanNessuna valutazione finora
- WalasDocumento5 pagineWalaspancawawanNessuna valutazione finora
- Ann Lab1Documento4 pagineAnn Lab1Budi PurnomoNessuna valutazione finora
- P 2 PchatserviceDocumento20 pagineP 2 PchatservicesuhasNessuna valutazione finora
- KurentoDocumento392 pagineKurentoTu PhamNessuna valutazione finora
- CCNA Practice Exam v5Documento12 pagineCCNA Practice Exam v5pukeaNessuna valutazione finora
- Vector Routing: Xroads Networks - White PaperDocumento8 pagineVector Routing: Xroads Networks - White PaperJNessuna valutazione finora
- 306 Internet FundamentalsDocumento86 pagine306 Internet FundamentalsMycareer RamNessuna valutazione finora
- Encryption and Decryption QuestionsDocumento6 pagineEncryption and Decryption QuestionsiyyanarNessuna valutazione finora
- A Performance Evaluation of Proactive and Reactive Protocols Using NS2 SimulationDocumento20 pagineA Performance Evaluation of Proactive and Reactive Protocols Using NS2 SimulationKarthikeyan.NNessuna valutazione finora
- Troubleshoot Qlik Sense Using LogsDocumento68 pagineTroubleshoot Qlik Sense Using LogsLucki Alan Fernandez Salcedo100% (1)
- CPX-FEC-PSI-US Embedded ControllerDocumento2 pagineCPX-FEC-PSI-US Embedded Controllerdaniel builesNessuna valutazione finora
- Diagrama Elementos Racks-SiteDocumento7 pagineDiagrama Elementos Racks-SiteSara GomezNessuna valutazione finora
- Infoblox Datasheet Ddi AppliancesDocumento5 pagineInfoblox Datasheet Ddi AppliancesMohamad YakzanNessuna valutazione finora
- Datasheet AIRNET 54Mb 802.11g Indoor High Power Access PointDocumento4 pagineDatasheet AIRNET 54Mb 802.11g Indoor High Power Access Pointcacr_72Nessuna valutazione finora
- Evo Controller 8200 IP Configuration KODocumento56 pagineEvo Controller 8200 IP Configuration KORogerioNessuna valutazione finora
- Web TechnologiesDocumento93 pagineWeb Technologiesshweta_46664Nessuna valutazione finora
- Asus RT-N12 - DD-WRT WikiDocumento4 pagineAsus RT-N12 - DD-WRT Wikicjrt68Nessuna valutazione finora
- How To Fix A Bricked Linksys RouterDocumento2 pagineHow To Fix A Bricked Linksys RouterBogdan CacuciNessuna valutazione finora
- Zebra Printer Setting NewDocumento4 pagineZebra Printer Setting NewAmitNessuna valutazione finora
- CON8171 Michalewicz-Michalewicz CON8171 RAC Operational BPDocumento74 pagineCON8171 Michalewicz-Michalewicz CON8171 RAC Operational BPNguyenNessuna valutazione finora
- Ericsson - LTE Architecture, KPIs and Troubleshooting - AircomDocumento54 pagineEricsson - LTE Architecture, KPIs and Troubleshooting - Aircomvishalkavi18100% (2)
- EBay Stealth BookDocumento116 pagineEBay Stealth BookBack Again100% (4)
- Uu It en Wifi Android Samsung s4Documento3 pagineUu It en Wifi Android Samsung s4Paul van LaarNessuna valutazione finora
- Advanced Networking Tutorial SheetsDocumento19 pagineAdvanced Networking Tutorial SheetsxyzkingNessuna valutazione finora
- FC-7688 User ManualDocumento55 pagineFC-7688 User ManualTarek GARA100% (1)
- Fdma Tdma Cdma Sdma PDFDocumento2 pagineFdma Tdma Cdma Sdma PDFDanielle100% (1)
- Srx-Cluster-Management-Best 2015Documento100 pagineSrx-Cluster-Management-Best 2015cossuttiNessuna valutazione finora
- General Introduction of Smartax Ma5800: Security LevelDocumento27 pagineGeneral Introduction of Smartax Ma5800: Security Levelvinh lưuNessuna valutazione finora
- In Call FlowDocumento39 pagineIn Call FlowPraveen Pratap100% (1)
- Lab CiscoDocumento2 pagineLab CiscoIkbal Nurman SaniNessuna valutazione finora
- Experienced Sivasubramanian G seeks challenging roleDocumento6 pagineExperienced Sivasubramanian G seeks challenging roleDaniel GnanaselvamNessuna valutazione finora
- Zimbra Daffodil Product Comparison - Feb 2023Documento4 pagineZimbra Daffodil Product Comparison - Feb 2023Jorge JHNessuna valutazione finora