Potrebbero piacerti anche
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetValutazione: 2 su 5 stelle2/5 (1)
- Name: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusDocumento15 pagineName: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusZulfiqar AliNessuna valutazione finora
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNessuna valutazione finora
- Position Control System: Transducer Amplifier Motor & Gearing Output Shaft Error + InputDocumento6 paginePosition Control System: Transducer Amplifier Motor & Gearing Output Shaft Error + InputZeeshan WaqasNessuna valutazione finora
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- 1 Background: Control System Design of A Continuous-Flow Stirred Tank Reactor (CSTR)Documento6 pagine1 Background: Control System Design of A Continuous-Flow Stirred Tank Reactor (CSTR)JalenstoneNessuna valutazione finora
- Controller Design On Matlab Platform Using Analog Root Loci: ObjectiveDocumento20 pagineController Design On Matlab Platform Using Analog Root Loci: ObjectiveTIYA JAINNessuna valutazione finora
- Control Systems Lab Report 1Documento7 pagineControl Systems Lab Report 1Niall KingNessuna valutazione finora
- Dynamic Analysis of IEEE 14 Bus System: Experiment No: 05Documento8 pagineDynamic Analysis of IEEE 14 Bus System: Experiment No: 05apsmadNessuna valutazione finora
- Magnetic Levitation PDFDocumento8 pagineMagnetic Levitation PDFAman MathurNessuna valutazione finora
- The PI Controlle1Documento5 pagineThe PI Controlle1YudhaNessuna valutazione finora
- Power Quality Enhancement Through Shunt Active Power Filter: Dr. A. S. Pandey Prof. A. K. SrivastavaDocumento44 paginePower Quality Enhancement Through Shunt Active Power Filter: Dr. A. S. Pandey Prof. A. K. SrivastavanidhiNessuna valutazione finora
- Kalman Filter MPPT Method For A Solar InverterDocumento5 pagineKalman Filter MPPT Method For A Solar InverterRamon Del PieroNessuna valutazione finora
- SMC BDC ConvertersDocumento10 pagineSMC BDC ConvertersJakdaksh HarshNessuna valutazione finora
- ELEN1000 Lab Cover Sheet - LAB 1Documento10 pagineELEN1000 Lab Cover Sheet - LAB 1Francis GomesNessuna valutazione finora
- Solutions: Solutions Manual For Sensor Systems Fundamentals and Applications 1St Edition SilvaDocumento29 pagineSolutions: Solutions Manual For Sensor Systems Fundamentals and Applications 1St Edition SilvaTumbal Gb0% (1)
- Edited - Project-Control-6210500358Documento18 pagineEdited - Project-Control-6210500358ณัฐวัศ มั่นบุญสมNessuna valutazione finora
- Fault Detection of Induction Motor Using Simulink: Satej Santosh ShetgaonkarDocumento9 pagineFault Detection of Induction Motor Using Simulink: Satej Santosh Shetgaonkarmirsuhail22Nessuna valutazione finora
- Dist Relay With CVTDocumento26 pagineDist Relay With CVTjaved shaikh chaandNessuna valutazione finora
- Maintenance and TroubleshootingDocumento6 pagineMaintenance and TroubleshootingSilo LibraNessuna valutazione finora
- Lab 9Documento13 pagineLab 9A. AlghamdiNessuna valutazione finora
- Switch-Mode Power Converter Compensation Made Easy: Robert SheehanDocumento38 pagineSwitch-Mode Power Converter Compensation Made Easy: Robert Sheehanjimmyboy111Nessuna valutazione finora
- Response Improvement of Proportional Control Solenoid Valve For Automatic TransmissionDocumento6 pagineResponse Improvement of Proportional Control Solenoid Valve For Automatic TransmissionsayproNessuna valutazione finora
- Input Shaping Control of CranesDocumento7 pagineInput Shaping Control of CranesMuhammad Auwal ShehuNessuna valutazione finora
- New England Reduced Model (39 Bus System) EMTP RV Study ReportDocumento31 pagineNew England Reduced Model (39 Bus System) EMTP RV Study ReportMd. Arifur KabirNessuna valutazione finora
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDocumento8 pagineA Comparative Study of Several Control Techniques Applied To A Boost ConverterSerhat GümüşNessuna valutazione finora
- Lab 1 Report: Ho Nguyen Bao Tran Le Huynh Minh NguyetDocumento20 pagineLab 1 Report: Ho Nguyen Bao Tran Le Huynh Minh NguyetBin BinNessuna valutazione finora
- Report Adaptive Bus SuspensionDocumento10 pagineReport Adaptive Bus SuspensionAhmad Zikry AfiqNessuna valutazione finora
- ME306 - Lab 3Documento12 pagineME306 - Lab 3Himanshu BansalNessuna valutazione finora
- c2 Lab Report Ee2413a A1Documento14 paginec2 Lab Report Ee2413a A1Fatin NazriNessuna valutazione finora
- CT ExplanationDocumento9 pagineCT ExplanationAous HNessuna valutazione finora
- Routh-Hurwitz Stability Criterion, (7) Root Locus & (8) Freq. Response AnalysisDocumento18 pagineRouth-Hurwitz Stability Criterion, (7) Root Locus & (8) Freq. Response AnalysisReinhard Tetap SemangatNessuna valutazione finora
- T R 1 - Testing Distance RelaysDocumento20 pagineT R 1 - Testing Distance RelaysCarlos Cordero HerreraNessuna valutazione finora
- ELE302 - PreLab 3Documento21 pagineELE302 - PreLab 3hughjass39.99Nessuna valutazione finora
- Electrical Systems Simulation LAB MANUAL 2019-2020Documento25 pagineElectrical Systems Simulation LAB MANUAL 2019-2020Vinay Kumar50% (2)
- EE582 Control Techniques Laboratory Report Jeswin Mathew 200901475Documento11 pagineEE582 Control Techniques Laboratory Report Jeswin Mathew 200901475Jeswin MathewNessuna valutazione finora
- Current TransformerDocumento5 pagineCurrent TransformerPrateek SinghNessuna valutazione finora
- Workshop 4 - Draft2Documento6 pagineWorkshop 4 - Draft2Saatwick MathurNessuna valutazione finora
- HVDC Fault Location PresentationDocumento66 pagineHVDC Fault Location PresentationAmila Pathirana100% (1)
- Copy Ball and Beam Report XDXDDocumento5 pagineCopy Ball and Beam Report XDXDEdu AguirreNessuna valutazione finora
- EE233 Lab1Documento20 pagineEE233 Lab1NguyenThanhSang0404Nessuna valutazione finora
- Amaquin OhmsLawDocumento6 pagineAmaquin OhmsLawgeo raganasNessuna valutazione finora
- Experiment 1 DIRECT CURRENT INSTRUMENT AND MEASUREMENTSDocumento1 paginaExperiment 1 DIRECT CURRENT INSTRUMENT AND MEASUREMENTSClaire GacayanNessuna valutazione finora
- Imf'Rovement of The Stability of The V/F Controlled Induction Motor Drive SystemsDocumento6 pagineImf'Rovement of The Stability of The V/F Controlled Induction Motor Drive Systemsvipinkumarm2102Nessuna valutazione finora
- Wind Turbine Pitch Adjustment Scheme Design ExerciseDocumento21 pagineWind Turbine Pitch Adjustment Scheme Design ExerciseMark RocheNessuna valutazione finora
- Quantifying The Potential Impacts of Disturbances On Power System ProtectionDocumento4 pagineQuantifying The Potential Impacts of Disturbances On Power System ProtectionmohsinamanNessuna valutazione finora
- Center of Advanced in Engineering, Islamabad: Studies Communication Systems LabDocumento6 pagineCenter of Advanced in Engineering, Islamabad: Studies Communication Systems LabMuhammad ShayanNessuna valutazione finora
- Lab 5Documento3 pagineLab 5Vu LeNessuna valutazione finora
- Network 08-14 SaqibDocumento25 pagineNetwork 08-14 SaqibAbdullah SohailNessuna valutazione finora
- Sample FinalDocumento10 pagineSample FinalsharadpjadhavNessuna valutazione finora
- Cuk Control PDFDocumento57 pagineCuk Control PDFPraveen PJNessuna valutazione finora
- CW ResitDocumento6 pagineCW ResitSyed Muhammad AlamNessuna valutazione finora
- Design of Optimal Controllers For A Ball & Beam SystemDocumento10 pagineDesign of Optimal Controllers For A Ball & Beam SystemGRD JournalsNessuna valutazione finora
- Exp 2 InstroDocumento16 pagineExp 2 InstroAbed Alrahman QaddourNessuna valutazione finora
- Electrical Protection EPRT101 ASSIGNMENT 2020Documento9 pagineElectrical Protection EPRT101 ASSIGNMENT 2020VELA MNGOMEZULUNessuna valutazione finora
- Lab 1Documento11 pagineLab 1Yme WyouNessuna valutazione finora
- 7 - Experiment ReultsDocumento11 pagine7 - Experiment ReultssreddybabuNessuna valutazione finora
- Overreaching of The Impedance Characteristic Using Automated TestingDocumento4 pagineOverreaching of The Impedance Characteristic Using Automated Testingjaved shaikh chaandNessuna valutazione finora
- Electrical Switchboard Test and Commissioning ProcedureDocumento4 pagineElectrical Switchboard Test and Commissioning ProcedureAodman4u100% (2)
- Accuracy Class of Current TransformerDocumento4 pagineAccuracy Class of Current TransformerSameera MadhushankaNessuna valutazione finora
- 2019 FSAE Tech FormDocumento10 pagine2019 FSAE Tech FormJason RichardsonNessuna valutazione finora
- Vibration Analysis Example ReportDocumento8 pagineVibration Analysis Example ReportJason RichardsonNessuna valutazione finora
- Test of Link Force SuspensionDocumento29 pagineTest of Link Force SuspensionJason RichardsonNessuna valutazione finora
- Line Following With PID AlgorithmDocumento12 pagineLine Following With PID AlgorithmJason RichardsonNessuna valutazione finora
- Robot For Boiler Header Inspection "LS-01": Procedia Engineering December 2012Documento8 pagineRobot For Boiler Header Inspection "LS-01": Procedia Engineering December 2012Jason RichardsonNessuna valutazione finora
- Ijert: Static and Dynamic Analysis of A Centrifugal Blower Using FeaDocumento11 pagineIjert: Static and Dynamic Analysis of A Centrifugal Blower Using FeaJason RichardsonNessuna valutazione finora
- Apply Innovate 2014 Ka Raceing KamenjasevicDocumento27 pagineApply Innovate 2014 Ka Raceing KamenjasevicJason RichardsonNessuna valutazione finora
- Ratapong ICOME 5Documento9 pagineRatapong ICOME 5Jason RichardsonNessuna valutazione finora
- Drum Dryer Moisture ControlDocumento12 pagineDrum Dryer Moisture ControlJason RichardsonNessuna valutazione finora
- Great Information On Friction WeldDocumento3 pagineGreat Information On Friction WeldJason RichardsonNessuna valutazione finora
- Modeling and Control of A Mixed - Ow Rice Dryer With Emphasis On Breakage QualityDocumento7 pagineModeling and Control of A Mixed - Ow Rice Dryer With Emphasis On Breakage QualityJason RichardsonNessuna valutazione finora
- MA5630 Term Project ReportDocumento22 pagineMA5630 Term Project ReportvamshiNessuna valutazione finora
- Kepes Gyorgy 1967 Light and DesignDocumento31 pagineKepes Gyorgy 1967 Light and DesignAnonymous TOMo4s100% (1)
- Development of A Basic Electro-Pneumatic Control TrainerDocumento7 pagineDevelopment of A Basic Electro-Pneumatic Control TrainerJeff PereyrasNessuna valutazione finora
- NCGD ProcedureDocumento2 pagineNCGD ProcedureAhmad ArifNessuna valutazione finora
- Funteachtic Learning Center Bulalacao Bldg. P. Zamora ST., Batangas CityDocumento2 pagineFunteachtic Learning Center Bulalacao Bldg. P. Zamora ST., Batangas CityLorna HerillaNessuna valutazione finora
- APS March Meeting 2017Documento116 pagineAPS March Meeting 2017mkromelNessuna valutazione finora
- Contoh SoalanDocumento5 pagineContoh SoalanPa ManjaNessuna valutazione finora
- Mathematical ModelsDocumento8 pagineMathematical ModelsSteve manicsicNessuna valutazione finora
- Production Engineering Reference Books For GATEDocumento3 pagineProduction Engineering Reference Books For GATEkavi_soniiNessuna valutazione finora
- Art 1 Jeopardy Final ReviewDocumento53 pagineArt 1 Jeopardy Final Reviewapi-243273616Nessuna valutazione finora
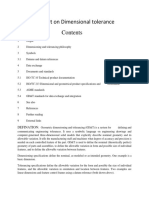
- Report On Dimensional Tolerance: DefinationDocumento10 pagineReport On Dimensional Tolerance: DefinationPiyush BariNessuna valutazione finora
- FluorosensDocumento14 pagineFluorosensabdul wahidNessuna valutazione finora
- Group 2 4620 Group ReportDocumento15 pagineGroup 2 4620 Group ReportAtitat Rattanachata100% (1)
- GDJP Unit-IiDocumento2 pagineGDJP Unit-IiPazhani VelNessuna valutazione finora
- PH141 Recommended Problems Chapt.10 EvenDocumento3 paginePH141 Recommended Problems Chapt.10 Evennomio12Nessuna valutazione finora
- Introduction To ANSYS WorkbenchDocumento29 pagineIntroduction To ANSYS WorkbenchSudhanwa KulkarniNessuna valutazione finora
- 136 Top Engineering Mechanics Question and Answers PDFDocumento12 pagine136 Top Engineering Mechanics Question and Answers PDFakashNessuna valutazione finora
- Weymouth and Panhandle Equations For Gas PipelinesDocumento4 pagineWeymouth and Panhandle Equations For Gas PipelinessgrsthNessuna valutazione finora
- Thermochemistry: - Petrucci, Herring Madura and BissonnetteDocumento49 pagineThermochemistry: - Petrucci, Herring Madura and BissonnetteYousif Khalid100% (1)
- New Insights Into The Removal of Calcium SulfateDocumento10 pagineNew Insights Into The Removal of Calcium SulfatetsanshineNessuna valutazione finora
- Electrophoresis TechniqueDocumento47 pagineElectrophoresis TechniqueHiroki PhạmNessuna valutazione finora
- Continuous Time Signals Part I Fourier SeriesDocumento12 pagineContinuous Time Signals Part I Fourier SeriesbusybeeNessuna valutazione finora
- Aguilar Et Al, 2000Documento8 pagineAguilar Et Al, 2000Edgar SilveiraNessuna valutazione finora
- Total StationDocumento7 pagineTotal Stationfaizankhan23Nessuna valutazione finora
- OTS600Documento161 pagineOTS600Rammo LunguNessuna valutazione finora
- Scientific Attitudes and ValuesDocumento12 pagineScientific Attitudes and ValuesSadik Khan83% (6)
- Nmat Physics Simulations (Mock 2) DIRECTIONS: Select The Best Answer To Each of TheDocumento4 pagineNmat Physics Simulations (Mock 2) DIRECTIONS: Select The Best Answer To Each of TheCin 0322Nessuna valutazione finora
- RPT Physics F6 Second Term 2019Documento8 pagineRPT Physics F6 Second Term 2019Norhazli IbrahimNessuna valutazione finora
- Interzone 954 Antifungus ReportDocumento10 pagineInterzone 954 Antifungus Reportsteffy182100% (1)
- Which Is Formed First, in Structural Geology Fold Then Fault or Fault Then FoldDocumento13 pagineWhich Is Formed First, in Structural Geology Fold Then Fault or Fault Then Foldanicetus namangNessuna valutazione finora
- The End of Craving: Recovering the Lost Wisdom of Eating WellDa EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellValutazione: 4.5 su 5 stelle4.5/5 (83)
- The Fabric of Civilization: How Textiles Made the WorldDa EverandThe Fabric of Civilization: How Textiles Made the WorldValutazione: 4.5 su 5 stelle4.5/5 (58)
- The Future of Geography: How the Competition in Space Will Change Our WorldDa EverandThe Future of Geography: How the Competition in Space Will Change Our WorldValutazione: 4 su 5 stelle4/5 (6)
- Hero Found: The Greatest POW Escape of the Vietnam WarDa EverandHero Found: The Greatest POW Escape of the Vietnam WarValutazione: 4 su 5 stelle4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonDa EverandSully: The Untold Story Behind the Miracle on the HudsonValutazione: 4 su 5 stelle4/5 (103)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachDa EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachValutazione: 3.5 su 5 stelle3.5/5 (6)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestDa EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestValutazione: 4 su 5 stelle4/5 (28)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDa EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNessuna valutazione finora
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerDa EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerValutazione: 4.5 su 5 stelle4.5/5 (54)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureDa EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureValutazione: 5 su 5 stelle5/5 (125)
- System Error: Where Big Tech Went Wrong and How We Can RebootDa EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootNessuna valutazione finora
- Transformed: Moving to the Product Operating ModelDa EverandTransformed: Moving to the Product Operating ModelValutazione: 4 su 5 stelle4/5 (1)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyDa EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNessuna valutazione finora
- Pale Blue Dot: A Vision of the Human Future in SpaceDa EverandPale Blue Dot: A Vision of the Human Future in SpaceValutazione: 4.5 su 5 stelle4.5/5 (588)
- Highest Duty: My Search for What Really MattersDa EverandHighest Duty: My Search for What Really MattersNessuna valutazione finora
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaDa EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNessuna valutazione finora
- Mini Farming: Self-Sufficiency on 1/4 AcreDa EverandMini Farming: Self-Sufficiency on 1/4 AcreValutazione: 4 su 5 stelle4/5 (76)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDa EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNessuna valutazione finora
- Four Battlegrounds: Power in the Age of Artificial IntelligenceDa EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceValutazione: 5 su 5 stelle5/5 (5)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreDa EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreValutazione: 4.5 su 5 stelle4.5/5 (33)
- Process Plant Equipment: Operation, Control, and ReliabilityDa EverandProcess Plant Equipment: Operation, Control, and ReliabilityValutazione: 5 su 5 stelle5/5 (1)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationDa EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationValutazione: 4.5 su 5 stelle4.5/5 (46)
- This Is What It Sounds Like: What the Music You Love Says About YouDa EverandThis Is What It Sounds Like: What the Music You Love Says About YouValutazione: 4 su 5 stelle4/5 (33)
- Fallout: The Hiroshima Cover-up and the Reporter Who Revealed It to the WorldDa EverandFallout: The Hiroshima Cover-up and the Reporter Who Revealed It to the WorldValutazione: 4.5 su 5 stelle4.5/5 (82)
- From Darwin to Derrida: Selfish Genes, Social Selves, and the Meanings of LifeDa EverandFrom Darwin to Derrida: Selfish Genes, Social Selves, and the Meanings of LifeValutazione: 4 su 5 stelle4/5 (2)