Potrebbero piacerti anche
- (Lab Report Operation Unit) Experiment 3: Separation of An Ordinary Binary Mixture Consisting of Acetic Acid and Water by Using Simple Batch Distillation Technique.Documento8 pagine(Lab Report Operation Unit) Experiment 3: Separation of An Ordinary Binary Mixture Consisting of Acetic Acid and Water by Using Simple Batch Distillation Technique.Fazsroul100% (9)
- PrimeTime Pulse Clocks Application NoteDocumento15 paginePrimeTime Pulse Clocks Application NoteSumanth VarmaNessuna valutazione finora
- 015-Method Statement For Painting Works (Building) PDFDocumento21 pagine015-Method Statement For Painting Works (Building) PDFKöksal Patan86% (21)
- Kurodas Identities IitDocumento7 pagineKurodas Identities IitbooksgiveknowledgeNessuna valutazione finora
- Chapter 6 Applications of The Laplace TransformDocumento33 pagineChapter 6 Applications of The Laplace Transformemuemuemu1111Nessuna valutazione finora
- Chapter 6 Applications of The Laplace TransformDocumento15 pagineChapter 6 Applications of The Laplace TransformerodashokNessuna valutazione finora
- Phase Locked Loop (Design and Implementation) : SNEHIL VERMA (14700)Documento22 paginePhase Locked Loop (Design and Implementation) : SNEHIL VERMA (14700)dharmendra kumarNessuna valutazione finora
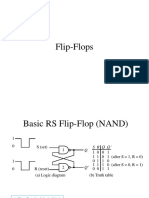
- Flip FlopsDocumento4 pagineFlip FlopsAniekan AmasiNessuna valutazione finora
- Computing With Spins - From Classical To Quantum Computing (Superlattices and Microstructures, Vol. 37, Issue 2) (2005)Documento10 pagineComputing With Spins - From Classical To Quantum Computing (Superlattices and Microstructures, Vol. 37, Issue 2) (2005)sepot24093Nessuna valutazione finora
- Impact of Transistor Aging On RF Low Noise Amplifier Performance of 28nm Technology: Reliability AssessmentDocumento4 pagineImpact of Transistor Aging On RF Low Noise Amplifier Performance of 28nm Technology: Reliability AssessmentSriSowmyaNessuna valutazione finora
- Design of Static Flip-Flops For Low-Power DigitalDocumento8 pagineDesign of Static Flip-Flops For Low-Power DigitalxmzbiskydemrfuvsjvNessuna valutazione finora
- Unit 5 - Digital System Design - WWW - Rgpvnotes.inDocumento8 pagineUnit 5 - Digital System Design - WWW - Rgpvnotes.intejasshroff0303Nessuna valutazione finora
- Lecture 5 FSM ClockDocumento4 pagineLecture 5 FSM ClockMustafaNessuna valutazione finora
- SN1-2223-Lab3 1-2 EngDocumento4 pagineSN1-2223-Lab3 1-2 EngBoualem MestafaNessuna valutazione finora
- C 93Documento24 pagineC 93Karthick NpNessuna valutazione finora
- G VD Transfer FunctionDocumento7 pagineG VD Transfer FunctionSamuel JuradoNessuna valutazione finora
- Control Systems Engineering: Chapter 2: Modeling in The Frequency DomainDocumento55 pagineControl Systems Engineering: Chapter 2: Modeling in The Frequency DomainAphichaya thanchaiNessuna valutazione finora
- 1 IECON-2020 Analytical Loss Equations For Three Level Active Neutral Point Clamped ConvertersDocumento6 pagine1 IECON-2020 Analytical Loss Equations For Three Level Active Neutral Point Clamped Convertersraghbendrat3884Nessuna valutazione finora
- Design and Implementation of Controlled Zeta Converter Power SupplyDocumento8 pagineDesign and Implementation of Controlled Zeta Converter Power Supplyyarra tejaNessuna valutazione finora
- Behavior of Switching Arc in Low-Voltage Limiter CircuitDocumento10 pagineBehavior of Switching Arc in Low-Voltage Limiter Circuitautomation vguardNessuna valutazione finora
- Design of A 24 GHZ Programmable Frequency DividerDocumento8 pagineDesign of A 24 GHZ Programmable Frequency DividerHagar IlbheryNessuna valutazione finora
- Answers To Example Exam 1 Spring 2018Documento12 pagineAnswers To Example Exam 1 Spring 2018Sirish OrugantiNessuna valutazione finora
- Slips In: Cycle Phase-Locked A Tutorial SurveyDocumento14 pagineSlips In: Cycle Phase-Locked A Tutorial SurveyvandalashahNessuna valutazione finora
- Lecture7 Part3Documento35 pagineLecture7 Part3aadiNessuna valutazione finora
- Chp1-2 Print BookDocumento40 pagineChp1-2 Print Bookbalaji_gawalwad9857Nessuna valutazione finora
- Multisim OscillatorDocumento5 pagineMultisim OscillatorJack bowmanNessuna valutazione finora
- RI R2 R3: VolitDocumento5 pagineRI R2 R3: VolitAldijana ZildžićNessuna valutazione finora
- Cavalcante PESC05 PDFDocumento7 pagineCavalcante PESC05 PDFbacuoc.nguyen356Nessuna valutazione finora
- Schematic Design and Layout of Flip Op Using CMOS TechnologyDocumento4 pagineSchematic Design and Layout of Flip Op Using CMOS TechnologySatyam MishraNessuna valutazione finora
- Flip-Flops and Latches-2Documento18 pagineFlip-Flops and Latches-2Alfred Kiruba RajNessuna valutazione finora
- Lab 7: Switched Capacitor Integrator.: 1. ObjectivesDocumento4 pagineLab 7: Switched Capacitor Integrator.: 1. ObjectivesKrishna Reddy KNessuna valutazione finora
- Understanding The Regenerative Comparator CircuitDocumento8 pagineUnderstanding The Regenerative Comparator CircuitzhaohhhengNessuna valutazione finora
- Steady-State Analysis of The LLC Series Resonant ConverterDocumento8 pagineSteady-State Analysis of The LLC Series Resonant Converter章肇珩Nessuna valutazione finora
- Development of Voltage-Controlled Oscillator 600-800Mhz For Direct Conversion Receiver ArchitectureDocumento6 pagineDevelopment of Voltage-Controlled Oscillator 600-800Mhz For Direct Conversion Receiver ArchitectureAzizur RahmanNessuna valutazione finora
- Cmos Inverter As A ComparatorDocumento5 pagineCmos Inverter As A ComparatorAnonymous TPVfFif6TONessuna valutazione finora
- L33 ECEN5817 Out1Documento14 pagineL33 ECEN5817 Out1djyNessuna valutazione finora
- Fast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitiesDocumento14 pagineFast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitieshakikNessuna valutazione finora
- Power 2Documento6 paginePower 2parveen1001Nessuna valutazione finora
- Evolution of Latches and Flip-Flops-1Documento24 pagineEvolution of Latches and Flip-Flops-1Ravi ThejaNessuna valutazione finora
- A Low-Jitter Sub-Sampling PLL With A Sub-Sampling DLLDocumento5 pagineA Low-Jitter Sub-Sampling PLL With A Sub-Sampling DLLanushaNessuna valutazione finora
- C 411 L 15 Dynamic LogicDocumento39 pagineC 411 L 15 Dynamic Logickeshav rocksNessuna valutazione finora
- Gate Driver For N-Channel Mosfet: Experiment 6Documento34 pagineGate Driver For N-Channel Mosfet: Experiment 6Noona MigleiNessuna valutazione finora
- Double Edge-Triggered D-Flip-Flops For High-Speed CMOS CircuitsDocumento3 pagineDouble Edge-Triggered D-Flip-Flops For High-Speed CMOS CircuitsJadhav VishalNessuna valutazione finora
- Three Phase Three Level Active NPC Converter For High Power System PDFDocumento6 pagineThree Phase Three Level Active NPC Converter For High Power System PDFNguyen Phu NhuanNessuna valutazione finora
- Reliability Analysis of A Novel Fault Tolerant Inverter TopologyDocumento6 pagineReliability Analysis of A Novel Fault Tolerant Inverter TopologyhemaNessuna valutazione finora
- 3 SequentialDocumento25 pagine3 SequentialZaziNessuna valutazione finora
- Effect of Power Transformer Neutral Grounding On High Voltage Network Single Phase Short Circuit LevelDocumento7 pagineEffect of Power Transformer Neutral Grounding On High Voltage Network Single Phase Short Circuit Levelمحمد الأمين سنوساويNessuna valutazione finora
- AN-1106 Application Note: An Improved Topology For Creating Split Rails From A Single Input VoltageDocumento12 pagineAN-1106 Application Note: An Improved Topology For Creating Split Rails From A Single Input Voltagejano2358jNessuna valutazione finora
- Transformer Windings' RLC Parameters Calculation and Lightning Impulse Voltage Distribution SimulationDocumento4 pagineTransformer Windings' RLC Parameters Calculation and Lightning Impulse Voltage Distribution SimulationOscar PieruzziniNessuna valutazione finora
- L-3/T-2/EEE Date: 11/07/2011: Section - ADocumento30 pagineL-3/T-2/EEE Date: 11/07/2011: Section - ARajesh RoyNessuna valutazione finora
- LabInstr EE320L Lab7Documento9 pagineLabInstr EE320L Lab7baig79Nessuna valutazione finora
- Tasc 2015 2391120Documento5 pagineTasc 2015 2391120Agustinus BNessuna valutazione finora
- Two-Stage Single-Phase Photovoltaic Grid-Tied Micro-Inverter Using Soft-Switching TechniquesDocumento6 pagineTwo-Stage Single-Phase Photovoltaic Grid-Tied Micro-Inverter Using Soft-Switching TechniquesAkshay bypNessuna valutazione finora
- Leakage in CMOS Circuits - An IntroductionDocumento20 pagineLeakage in CMOS Circuits - An Introduction275108006Nessuna valutazione finora
- Tutorial On Computer-Aided Analysis Switched-Capacitor CircuitsDocumento19 pagineTutorial On Computer-Aided Analysis Switched-Capacitor CircuitsnidhalNessuna valutazione finora
- A Study of Oscillator Jitter Due To Supply and Substrate NoiseDocumento7 pagineA Study of Oscillator Jitter Due To Supply and Substrate Noisesm123ts456Nessuna valutazione finora
- A New Push Pull Zero Voltage Switching Quasi Resonant Converter-Topology and ExperDocumento5 pagineA New Push Pull Zero Voltage Switching Quasi Resonant Converter-Topology and ExperSucheta Chatterjee SethiNessuna valutazione finora
- An Active Inductor-Based VCO With Wide Tuning Range and High DC-to-RF Power EfficiencyDocumento5 pagineAn Active Inductor-Based VCO With Wide Tuning Range and High DC-to-RF Power EfficiencyOmarFaruqeNessuna valutazione finora
- Steven Lee: Power Electronics Product Manager - Keysight Pathwave Software SolutionsDocumento31 pagineSteven Lee: Power Electronics Product Manager - Keysight Pathwave Software SolutionsVăn CôngNessuna valutazione finora
- A High Performance 192MHz Digitally Controlled CryDocumento8 pagineA High Performance 192MHz Digitally Controlled CryKisuke UraharaNessuna valutazione finora
- Research On The Characteristics of TEV When Disconnector Operating in UHV GISDocumento7 pagineResearch On The Characteristics of TEV When Disconnector Operating in UHV GISBalajiNessuna valutazione finora
- Variation Library Application NoteDocumento18 pagineVariation Library Application Noteraja273Nessuna valutazione finora
- Clock DividersDocumento19 pagineClock Dividersapi-376268992% (12)
- SNUG PaperDocumento33 pagineSNUG Paperkumarguptav91Nessuna valutazione finora
- SNUG PaperDocumento33 pagineSNUG Paperkumarguptav91Nessuna valutazione finora
- Pin Access PDFDocumento13 paginePin Access PDFXachaturNessuna valutazione finora
- Assignment SynthesisDocumento3 pagineAssignment SynthesisSumanth VarmaNessuna valutazione finora
- RegexpDocumento28 pagineRegexpPhuong TranNessuna valutazione finora
- Clock DividersDocumento19 pagineClock Dividersapi-376268992% (12)
- Establishing Qor Flow On Emerging Technology Nodes: Pramod Sripathi Sreenivasa Reddy Kasireddy Raj Sekhar BochkarDocumento33 pagineEstablishing Qor Flow On Emerging Technology Nodes: Pramod Sripathi Sreenivasa Reddy Kasireddy Raj Sekhar BochkarSumanth VarmaNessuna valutazione finora
- An Alternative Approach To Buffer Insertion For Delay and Power Reduction in VLSI InterconnectsDocumento6 pagineAn Alternative Approach To Buffer Insertion For Delay and Power Reduction in VLSI InterconnectsSumanth VarmaNessuna valutazione finora
- Using The Set - Clock - Sense - Stop - Propagation Command Properly With PrimeTime SIDocumento3 pagineUsing The Set - Clock - Sense - Stop - Propagation Command Properly With PrimeTime SISumanth VarmaNessuna valutazione finora
- 128888Documento85 pagine128888Sumanth VarmaNessuna valutazione finora
- Clock DividersDocumento19 pagineClock Dividersapi-376268992% (12)
- RegexpDocumento28 pagineRegexpPhuong TranNessuna valutazione finora
- MIT6 012F09 Lec12 PDFDocumento29 pagineMIT6 012F09 Lec12 PDFSumanth VarmaNessuna valutazione finora
- Assign SolutionsDocumento1 paginaAssign SolutionsSumanth VarmaNessuna valutazione finora
- Synthesis Assignment - 1Documento3 pagineSynthesis Assignment - 1Sumanth VarmaNessuna valutazione finora
- AN 445: Design Guidelines For Implementing DDR and DDR2 SDRAM Interfaces in Cyclone III DevicesDocumento35 pagineAN 445: Design Guidelines For Implementing DDR and DDR2 SDRAM Interfaces in Cyclone III DevicesSumanth VarmaNessuna valutazione finora
- Lecture 3 STADocumento55 pagineLecture 3 STAAn HuynhNessuna valutazione finora
- Implementing Double Data Rate I/O Signaling in Stratix & Stratix GX DevicesDocumento22 pagineImplementing Double Data Rate I/O Signaling in Stratix & Stratix GX DevicesSumanth VarmaNessuna valutazione finora
- Sync AsyncDocumento31 pagineSync AsyncAnand ThibbaiahNessuna valutazione finora
- Csa PDFDocumento2 pagineCsa PDFgannoju423Nessuna valutazione finora
- Low Power Design Methodologies and FlowsDocumento52 pagineLow Power Design Methodologies and FlowsSumanth VarmaNessuna valutazione finora
- Hyderabad Workshop RecommendationsDocumento17 pagineHyderabad Workshop RecommendationsSumanth VarmaNessuna valutazione finora
- Eeiol 2009mar26 Eda Ta 01Documento2 pagineEeiol 2009mar26 Eda Ta 01Sumanth VarmaNessuna valutazione finora
- 5 AdderDocumento35 pagine5 AdderSumanth VarmaNessuna valutazione finora
- Body Bias Scaling For Globalfoundries 22fdx Technology New Dimension To Explore The DesignDocumento28 pagineBody Bias Scaling For Globalfoundries 22fdx Technology New Dimension To Explore The DesignSumanth VarmaNessuna valutazione finora
- LEC Jumpstart Training OverviewDocumento37 pagineLEC Jumpstart Training OverviewSumanth VarmaNessuna valutazione finora
- Safety Incident ReportDocumento10 pagineSafety Incident ReportMelanie BrittainNessuna valutazione finora
- Catalyser: Magnetic Effects of Electric Current Faculty Sheet SolutionDocumento4 pagineCatalyser: Magnetic Effects of Electric Current Faculty Sheet SolutionShalika SinhaNessuna valutazione finora
- Banana ChipsDocumento5 pagineBanana Chipsbikram limbuNessuna valutazione finora
- COMSATS University Islamabad, Abbottabad Campus Department of Electrical and Computer Engineering Assignment#1Documento1 paginaCOMSATS University Islamabad, Abbottabad Campus Department of Electrical and Computer Engineering Assignment#1Aurang ZaibNessuna valutazione finora
- DSV SVDocumento1 paginaDSV SVPUNITHA KUMARNessuna valutazione finora
- Wabco GuideDocumento16 pagineWabco GuideMohd FairusNessuna valutazione finora
- Design CalculationDocumento13 pagineDesign CalculationSunil KumarNessuna valutazione finora
- HART Tech Short FormDocumento9 pagineHART Tech Short FormJediael JuniorNessuna valutazione finora
- Axis College of Engineering & Technology, AmbanolyDocumento3 pagineAxis College of Engineering & Technology, AmbanolygatewayglobalNessuna valutazione finora
- ASTM D 653-97 Standard Terminology Relating To Soil, Rock, and Contained FluidsDocumento35 pagineASTM D 653-97 Standard Terminology Relating To Soil, Rock, and Contained FluidsPablo Antonio Valcárcel VargasNessuna valutazione finora
- UNNPX206R3Documento4 pagineUNNPX206R3David OlayaNessuna valutazione finora
- Instructions VbamDocumento2 pagineInstructions VbamAustin Yu LiuNessuna valutazione finora
- CPAR Summary - WK 144Documento6 pagineCPAR Summary - WK 144NagarajNessuna valutazione finora
- VECU - Manual de Producción 70312913Documento33 pagineVECU - Manual de Producción 70312913RainorSS100% (2)
- Honpe CatalogueDocumento23 pagineHonpe CatalogueGrupo XDSNessuna valutazione finora
- Research Report (JAHANGIR'S TOMB)Documento24 pagineResearch Report (JAHANGIR'S TOMB)ahmerNessuna valutazione finora
- AC 43.13-1B Section 5 Penetrant InspectionDocumento8 pagineAC 43.13-1B Section 5 Penetrant Inspection320338100% (1)
- IntegratingBIMTechnologyintoLA (2014) PDFDocumento115 pagineIntegratingBIMTechnologyintoLA (2014) PDFArnaldo RuizNessuna valutazione finora
- Melde's MethodDocumento2 pagineMelde's MethodDR.P.V.Kanaka Rao0% (1)
- Technological University of The Philippines ManilaDocumento1 paginaTechnological University of The Philippines Manilalesterginno de guzmanNessuna valutazione finora
- Cswip QuestionDocumento3 pagineCswip Questionfasith9534Nessuna valutazione finora
- Recovery of Spent CatalystDocumento4 pagineRecovery of Spent CatalystUtsav PatelNessuna valutazione finora
- Bulk CollectDocumento5 pagineBulk CollectAbhishekNessuna valutazione finora
- Geographic Information System of Public Complaint Testing Based On Mobile WebDocumento2 pagineGeographic Information System of Public Complaint Testing Based On Mobile WebArya HardinataNessuna valutazione finora
- MAX32xx, Serial To TTLDocumento17 pagineMAX32xx, Serial To TTLDecker JamesNessuna valutazione finora
- High Precision Ball Berings GMNDocumento72 pagineHigh Precision Ball Berings GMNSilvio Busdraghi AmorosoNessuna valutazione finora
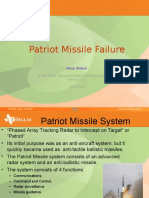
- Patriot MissileDocumento19 paginePatriot MissileBogdan Claudiu HututuiNessuna valutazione finora