Potrebbero piacerti anche
- 100 circuitos de shields para arduino (español)Da Everand100 circuitos de shields para arduino (español)Valutazione: 3.5 su 5 stelle3.5/5 (3)
- Informe Ultrasónico-OSCAR RODRIGUEZDocumento6 pagineInforme Ultrasónico-OSCAR RODRIGUEZOscar Ivan Rodriguez PulloquingaNessuna valutazione finora
- Display LCD en MikrocDocumento6 pagineDisplay LCD en Mikrocfer poloNessuna valutazione finora
- Manual de Practicas para Pic S en Lenguaje CDocumento48 pagineManual de Practicas para Pic S en Lenguaje CGerman A CMeNessuna valutazione finora
- Informe 2.4Documento6 pagineInforme 2.4Miguel CuevaNessuna valutazione finora
- Manejo de LCD 16x2Documento12 pagineManejo de LCD 16x2Diego Segoviano GarciaNessuna valutazione finora
- Temperatura Con PIC18f4550Documento4 pagineTemperatura Con PIC18f4550yahirdavid3096Nessuna valutazione finora
- Teoria Sisdig S07Documento9 pagineTeoria Sisdig S07Diana Rebecca Rodríguez RuizNessuna valutazione finora
- Practica 4Documento7 paginePractica 4PanchosucuNessuna valutazione finora
- Guia 1Documento3 pagineGuia 1Giovanny AldásNessuna valutazione finora
- 11 Ejercicios Micros en CDocumento76 pagine11 Ejercicios Micros en CSebastian GutierrezNessuna valutazione finora
- Guia Lab ADC16f MikrobasicDocumento3 pagineGuia Lab ADC16f MikrobasicAna Sofia MamaniNessuna valutazione finora
- CronometroDocumento5 pagineCronometrohennyNessuna valutazione finora
- CAP 4 - Lab # 7 - Micros I - Led Blink CCS y Pulsador LED - INGENIERO DESIDERIA ARANCIBIA RIVERADocumento6 pagineCAP 4 - Lab # 7 - Micros I - Led Blink CCS y Pulsador LED - INGENIERO DESIDERIA ARANCIBIA RIVERAsopita maniNessuna valutazione finora
- Programacion PIC18 en CDocumento40 pagineProgramacion PIC18 en CEsam PcarrascoNessuna valutazione finora
- Martiz de LED Manual BásicoDocumento8 pagineMartiz de LED Manual BásicoDESTROYER2020Nessuna valutazione finora
- Actividad 32 Practica 5 P3Documento8 pagineActividad 32 Practica 5 P3Julio LópezNessuna valutazione finora
- Guia de Lab. 4 Convertidor Análogo Digital - ADCDocumento3 pagineGuia de Lab. 4 Convertidor Análogo Digital - ADCOmar Navia CondoriNessuna valutazione finora
- Actividad 31 Practica 4 P3Documento8 pagineActividad 31 Practica 4 P3Julio LópezNessuna valutazione finora
- Tips Practica1 SenalesDocumento13 pagineTips Practica1 Senalesjoel viloriaNessuna valutazione finora
- Actividad 3.4 LM35 y AlarmasDocumento1 paginaActividad 3.4 LM35 y AlarmasEfrain RdzNessuna valutazione finora
- Lab 1.1 Quimuña Velasco CandoDocumento11 pagineLab 1.1 Quimuña Velasco CandoMATEO ALEJANDRO QUIMU�A POZONessuna valutazione finora
- Proyecto-Semaforo DigitalDocumento4 pagineProyecto-Semaforo DigitalJosue Marcelo ChavarriaNessuna valutazione finora
- Práctica 2 Semestre Agosto-Dic 2013Documento4 paginePráctica 2 Semestre Agosto-Dic 2013Cesar SánchezNessuna valutazione finora
- 11 Ejercicios Micros en C V2 PDFDocumento76 pagine11 Ejercicios Micros en C V2 PDFwilliamNessuna valutazione finora
- Guia de Lab 3 - InterrupcionDocumento3 pagineGuia de Lab 3 - InterrupcionDaniel EstradaNessuna valutazione finora
- Laboratorio 01 - 2020ADocumento1 paginaLaboratorio 01 - 2020AOlesya SergeevaNessuna valutazione finora
- Lab 1 Microprocesadores IDocumento17 pagineLab 1 Microprocesadores IPERA peraNessuna valutazione finora
- DesAvanzMicros Taller Practico IIDocumento23 pagineDesAvanzMicros Taller Practico IImelanie.ingrid2003Nessuna valutazione finora
- Guia 2Documento3 pagineGuia 2LAURA XIMENA ARISMENDY TRIANANessuna valutazione finora
- Generador Señal Pic877Documento6 pagineGenerador Señal Pic877Karol Jhadira Sullca HuarocNessuna valutazione finora
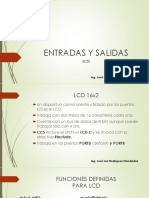
- Entradas y Salidas-LcdDocumento33 pagineEntradas y Salidas-LcdelNessuna valutazione finora
- Laboratorio # 1Documento11 pagineLaboratorio # 1luz davalosNessuna valutazione finora
- MICROCODE Programa de Secuencia de Led y SemaforoDocumento13 pagineMICROCODE Programa de Secuencia de Led y SemaforoDanny Sixto Armijos LoyolaNessuna valutazione finora
- Laboratorio 1 IAR-600Documento4 pagineLaboratorio 1 IAR-600Carla Sanchez100% (1)
- Sensor de TemperaturaDocumento6 pagineSensor de TemperaturaMeandrus SanchezNessuna valutazione finora
- PRE-LABORATORIO 01-Gilberto Perpiñán UPCDocumento21 paginePRE-LABORATORIO 01-Gilberto Perpiñán UPCPedro EsparragozaNessuna valutazione finora
- Práctica 1.1Documento16 paginePráctica 1.1ARTURONessuna valutazione finora
- Circuito para La Implementación BootloaderDocumento1 paginaCircuito para La Implementación BootloaderJoyce AverandaNessuna valutazione finora
- INFORME HwghgwrihgirDocumento7 pagineINFORME HwghgwrihgirRICHARD ALEXANDER PAUCAR FONSECANessuna valutazione finora
- Evaluación Tema 9 TAREA 8%Documento3 pagineEvaluación Tema 9 TAREA 8%José Angel CarrascoNessuna valutazione finora
- Programa y Circuito de Ohmetro en MicrocodeDocumento4 paginePrograma y Circuito de Ohmetro en MicrocodeKevin Muyón RiveraNessuna valutazione finora
- Frecuencimetro de 0 A 255 HZDocumento3 pagineFrecuencimetro de 0 A 255 HZchuyin barajasNessuna valutazione finora
- Laboratorio04-Interrupciones ExternaDocumento3 pagineLaboratorio04-Interrupciones ExternaJosue Marcelo ChavarriaNessuna valutazione finora
- Soto Ricardo Taller3Documento12 pagineSoto Ricardo Taller3ricardo.soto14Nessuna valutazione finora
- Práctica 2.3Documento16 paginePráctica 2.3ARTURONessuna valutazione finora
- Aplicaciones Avanzadas Con PicDocumento26 pagineAplicaciones Avanzadas Con Piccesar huamanNessuna valutazione finora
- Lab 7 Comunicacion USBDocumento8 pagineLab 7 Comunicacion USBAlvaro yupanqui floresNessuna valutazione finora
- PDC I2CDocumento11 paginePDC I2CLuis NuñezNessuna valutazione finora
- Microcontroladores Clase1 PDFDocumento10 pagineMicrocontroladores Clase1 PDFFelipe Angel Ramirez AparicioNessuna valutazione finora
- ATmega8 Ders 2Documento26 pagineATmega8 Ders 2Leo Mantilla ArrazolaNessuna valutazione finora
- Guia Dimmer DigitalDocumento2 pagineGuia Dimmer DigitalANDERSONNessuna valutazione finora
- Monitor de Produccion GiganteDocumento12 pagineMonitor de Produccion GiganteJOSEMARIA RAFAEL ARCE FALLANessuna valutazione finora
- Puertos Io Pic16f628aDocumento1 paginaPuertos Io Pic16f628aRoger Reynaldo Guachalla NarvaezNessuna valutazione finora
- Control de Paso A Paso Con Dspic30f4013Documento3 pagineControl de Paso A Paso Con Dspic30f4013Jorge More0% (1)
- Proyecto Final PDFDocumento19 pagineProyecto Final PDFHarold F. LaraNessuna valutazione finora
- Lab 3 Microprocesadores IDocumento20 pagineLab 3 Microprocesadores IPERA peraNessuna valutazione finora
- Práctica 1.3Documento18 paginePráctica 1.3ARTURONessuna valutazione finora
- Laboratorio Sisdig S10Documento8 pagineLaboratorio Sisdig S10Diana Rebecca Rodríguez RuizNessuna valutazione finora
- 2.3 Ejem de Reg W y Programa Secuencia de LedsDocumento9 pagine2.3 Ejem de Reg W y Programa Secuencia de LedsOmar Navia CondoriNessuna valutazione finora
- MetodoDocumento2 pagineMetodoDennis BurgasiNessuna valutazione finora
- FodaDocumento1 paginaFodaDennis BurgasiNessuna valutazione finora
- Causa y Efecto MarielyDocumento2 pagineCausa y Efecto MarielyDennis BurgasiNessuna valutazione finora
- Calidad en El ServicioDocumento18 pagineCalidad en El ServicioDennis Burgasi0% (1)
- PLC Modulo em 235Documento7 paginePLC Modulo em 235Dennis BurgasiNessuna valutazione finora
- Ensayo CorreaDocumento4 pagineEnsayo CorreaDennis BurgasiNessuna valutazione finora
- Informe OLXDocumento6 pagineInforme OLXDennis BurgasiNessuna valutazione finora
- Teoria ImagenesDocumento15 pagineTeoria ImagenesDennis BurgasiNessuna valutazione finora
- Banco de Preguntas AntenasDocumento12 pagineBanco de Preguntas AntenasDennis BurgasiNessuna valutazione finora
- Capitulo 1Documento16 pagineCapitulo 1Abrank Siemen100% (1)
- Sombras de LibertadDocumento3 pagineSombras de LibertadDennis Burgasi100% (1)
- Antenas BocinaDocumento4 pagineAntenas BocinaDennis BurgasiNessuna valutazione finora
- Texto CientificoDocumento6 pagineTexto CientificoDennis BurgasiNessuna valutazione finora
- Acoplamiento de BocinasDocumento6 pagineAcoplamiento de BocinasAlejandro Lluque GarciaNessuna valutazione finora
- Control de Lectura de Gestion de CostosDocumento2 pagineControl de Lectura de Gestion de CostosAbc0% (1)
- Curso Diseño y Calculo de CompresoresDocumento39 pagineCurso Diseño y Calculo de CompresoresHeber FloresNessuna valutazione finora
- Tipos de EnfriamientoDocumento10 pagineTipos de EnfriamientoCarlos Cjuno Bustamante0% (1)
- Geotecnia Taller 1Documento44 pagineGeotecnia Taller 1eduardo100796Nessuna valutazione finora
- Cinetica Quimica ZaragozaDocumento2 pagineCinetica Quimica Zaragozapelu1000Nessuna valutazione finora
- Informe 6 Manjar BlancoDocumento8 pagineInforme 6 Manjar BlancoAnonymous XtMT8kvNessuna valutazione finora
- Diagonalización Ortogonal PDFDocumento8 pagineDiagonalización Ortogonal PDFJosé GómezNessuna valutazione finora
- Laboratorio No 1 - Sistemas Cristalinos2017Documento12 pagineLaboratorio No 1 - Sistemas Cristalinos2017Daniel GomezNessuna valutazione finora
- Metodos Instrumentales 1Documento4 pagineMetodos Instrumentales 1Julio TiradoNessuna valutazione finora
- Partes de La CámaraDocumento6 paginePartes de La CámaraWaiio VasquezNessuna valutazione finora
- Paisaje Industrial y Región Industrial en Europa en Los Siglos XVI, XVII y XVIIIDocumento15 paginePaisaje Industrial y Región Industrial en Europa en Los Siglos XVI, XVII y XVIIIFranco Zé0% (1)
- CuestionarioDocumento2 pagineCuestionarioMoises Alonso Gomez RamirezNessuna valutazione finora
- Técnicas de Extracción de La ClorofilaDocumento10 pagineTécnicas de Extracción de La ClorofilaMit TorresNessuna valutazione finora
- 2 Presentación TécnicaDocumento78 pagine2 Presentación TécnicaMiguel Angel Romero FalconNessuna valutazione finora
- Papel de EsterilizacionDocumento16 paginePapel de Esterilizacionnikita_30Nessuna valutazione finora
- NTC436Documento4 pagineNTC436NenaMolinaNessuna valutazione finora
- Cilindros Hidráulicos - Guia de Reutilizacion PDFDocumento55 pagineCilindros Hidráulicos - Guia de Reutilizacion PDFFernando Tapia Gibson100% (1)
- Astm C42-99Documento5 pagineAstm C42-99Orlando Manriquez L100% (1)
- Ejercicios 3Documento3 pagineEjercicios 3noelito010Nessuna valutazione finora
- Tabla de CargaDocumento20 pagineTabla de CargaSebastian AriasNessuna valutazione finora
- ABP-campo MagneticoDocumento26 pagineABP-campo MagneticoRodrigo Leonardo Ortiz FerrelNessuna valutazione finora
- P01 Hazen 3 Reservorios Mejor SoluciónDocumento2 pagineP01 Hazen 3 Reservorios Mejor SoluciónMARK ALDAIR QUIROZ TRUJILLONessuna valutazione finora
- Grupo Electrogeno para Un DatacenterDocumento40 pagineGrupo Electrogeno para Un DatacenterDavid Cruz Torres100% (2)
- Ir 01Documento75 pagineIr 01Dereck JVNessuna valutazione finora
- Circuitos y LaplaceDocumento9 pagineCircuitos y LaplaceZareth ChargoyNessuna valutazione finora
- Actividad Integradora Etapa 4 QUIMICA 1Documento6 pagineActividad Integradora Etapa 4 QUIMICA 1Kevin VS50% (2)
- DestilaspenDocumento11 pagineDestilaspenvane212Nessuna valutazione finora
- 7 CompactaciónDocumento36 pagine7 CompactaciónLenin MazaquizaNessuna valutazione finora
- BPMDocumento8 pagineBPMElyy ZmbrnoNessuna valutazione finora