Potrebbero piacerti anche
- Chapter 3 Truss ElementsDocumento19 pagineChapter 3 Truss Elementsanoop asokanNessuna valutazione finora
- Fig. 3.2.1 Finite Element Mesh Consisting of Triangular and Rectangular ElementDocumento9 pagineFig. 3.2.1 Finite Element Mesh Consisting of Triangular and Rectangular Elementsrinadh1602Nessuna valutazione finora
- CH7 FEM FOR TWO DIMENSIONAL SOLIDS - v2Documento22 pagineCH7 FEM FOR TWO DIMENSIONAL SOLIDS - v2Eng.Hesham AL-HelaleeNessuna valutazione finora
- CH3 Fundamentals For Finite Element Method - v2Documento8 pagineCH3 Fundamentals For Finite Element Method - v2Eng.Hesham AL-Helalee100% (1)
- Shape FunctionDocumento16 pagineShape FunctionChiheb BEN ABDALLAHNessuna valutazione finora
- FEM For FramesDocumento12 pagineFEM For Framesrohit100% (1)
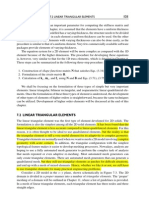
- 2D Triangular ElementsarticleDocumento19 pagine2D Triangular ElementsarticleYasirBashirNessuna valutazione finora
- CH4 FEM FOR TRUSSES - v2Documento13 pagineCH4 FEM FOR TRUSSES - v2Eng.Hesham AL-HelaleeNessuna valutazione finora
- Phantom Node MethodDocumento12 paginePhantom Node MethodRabindraSubediNessuna valutazione finora
- TheFinElementMethodpracticalcourse - Muya 148Documento1 paginaTheFinElementMethodpracticalcourse - Muya 148bagmassNessuna valutazione finora
- Three-Dimensional Orthogonal Vector Basis Functions For Time-Domain Finite Element Solution of Vector Wave EquationsDocumento8 pagineThree-Dimensional Orthogonal Vector Basis Functions For Time-Domain Finite Element Solution of Vector Wave Equationsimranismail08Nessuna valutazione finora
- December 24, 2009 17:17 WSPC/IJCM-j050 00195Documento34 pagineDecember 24, 2009 17:17 WSPC/IJCM-j050 00195Bui Hoang GiangNessuna valutazione finora
- A Generalization Drawing of Algebraic Surface: James F. Blinn Jet Propulsion LaboratoryDocumento22 pagineA Generalization Drawing of Algebraic Surface: James F. Blinn Jet Propulsion Laboratorydgvcchn4766Nessuna valutazione finora
- Fem TextDocumento34 pagineFem TextcreativenggNessuna valutazione finora
- Dynamic Remeshing and Applications: J. Vorsatz, Ch. R Ossl, and H.-P. SeidelDocumento8 pagineDynamic Remeshing and Applications: J. Vorsatz, Ch. R Ossl, and H.-P. SeidelAntonio C. KeithNessuna valutazione finora
- Visual Modeling With A Hand-Held Camera: AbstractDocumento26 pagineVisual Modeling With A Hand-Held Camera: AbstractLucas Thom RamosNessuna valutazione finora
- 2D Triangular ElementsDocumento24 pagine2D Triangular ElementsAmmir SantosaNessuna valutazione finora
- An Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical SimulationDocumento16 pagineAn Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical Simulationaviraj2006Nessuna valutazione finora
- Engineering Analysis With Boundary Elements: Wei Gao, Mengyan ZangDocumento6 pagineEngineering Analysis With Boundary Elements: Wei Gao, Mengyan ZangAbdi MehdiNessuna valutazione finora
- MLESAC: A New Robust Estimator With Application To Estimating Image GeometryDocumento19 pagineMLESAC: A New Robust Estimator With Application To Estimating Image GeometryBoobalan DhanabalanNessuna valutazione finora
- Feu 1Documento42 pagineFeu 1Tesfa TeshomeNessuna valutazione finora
- Module 3: Element Properties Lecture 6: Isoparametric FormulationDocumento8 pagineModule 3: Element Properties Lecture 6: Isoparametric FormulationDaniyal965Nessuna valutazione finora
- Vibration AnalysisDocumento17 pagineVibration AnalysispmagrawalNessuna valutazione finora
- Symmetry and Bandwidth: AE and Bars 3, 4, 5, and 6Documento11 pagineSymmetry and Bandwidth: AE and Bars 3, 4, 5, and 6Hilary WatsonNessuna valutazione finora
- Mechanics CH-5 MarkosDocumento10 pagineMechanics CH-5 MarkosGadisaNessuna valutazione finora
- Full Text 01Documento7 pagineFull Text 01Voskula ShivakrishnaNessuna valutazione finora
- Multi-Frame Alignment of Planes: Lihi Zelnik-Manor Michal IraniDocumento6 pagineMulti-Frame Alignment of Planes: Lihi Zelnik-Manor Michal IraniQuách Thế XuânNessuna valutazione finora
- Introduction To Finite Element Analysis in Solid Mechanics: Home Quick Navigation Problems FEA CodesDocumento25 pagineIntroduction To Finite Element Analysis in Solid Mechanics: Home Quick Navigation Problems FEA CodespalgunahgNessuna valutazione finora
- FEM - Report LUSAS SoftwareDocumento27 pagineFEM - Report LUSAS SoftwareSiti Rohani IsdrisNessuna valutazione finora
- Finite Element Analysis PDFDocumento46 pagineFinite Element Analysis PDFrajani_bala15Nessuna valutazione finora
- Chapter 6Documento18 pagineChapter 6ehmyggasNessuna valutazione finora
- Bayesian Stochastic Mesh Optimisation For 3D Reconstruction: George Vogiatzis Philip Torr Roberto CipollaDocumento12 pagineBayesian Stochastic Mesh Optimisation For 3D Reconstruction: George Vogiatzis Philip Torr Roberto CipollaneilwuNessuna valutazione finora
- 03b Direct Stiffness Method TrussDocumento18 pagine03b Direct Stiffness Method TrussAnamolNessuna valutazione finora
- Axisymmetric Stress Analysis: Z Denote Respectively The Radial and Axial Coordinates of ADocumento15 pagineAxisymmetric Stress Analysis: Z Denote Respectively The Radial and Axial Coordinates of ApnaxdNessuna valutazione finora
- The Direct Stiffness Method IDocumento7 pagineThe Direct Stiffness Method Imiry89Nessuna valutazione finora
- Presentation On Matrix Method For Structure AnalysisDocumento20 paginePresentation On Matrix Method For Structure AnalysisVAIDEHI BEAUTY CARE by DEEPA BHAVSARNessuna valutazione finora
- A Region-Based Model and Binary Level Set Function Applied To Weld Defects Detection in Radiographic ImagesDocumento9 pagineA Region-Based Model and Binary Level Set Function Applied To Weld Defects Detection in Radiographic ImagesInternational Journal of New Computer Architectures and their Applications (IJNCAA)Nessuna valutazione finora
- NozzleproDocumento20 pagineNozzleprossmith2007Nessuna valutazione finora
- Quadratic Tetrahedral ElementDocumento25 pagineQuadratic Tetrahedral ElementAnees KNessuna valutazione finora
- SRM Institute of Science and Technology: 18Mee305T - Finite Element MethodDocumento22 pagineSRM Institute of Science and Technology: 18Mee305T - Finite Element MethodhoseriNessuna valutazione finora
- Foundation Uplift RaftDocumento10 pagineFoundation Uplift RaftAbstruse ConsultnatsNessuna valutazione finora
- Akima InterpolationDocumento14 pagineAkima Interpolationmarcosipa70% (1)
- Comparison of Finite Volume MethodDocumento11 pagineComparison of Finite Volume MethodRozyFHarnasNessuna valutazione finora
- Truss ElementDocumento21 pagineTruss Elementgreen77parkNessuna valutazione finora
- A Novel Image Fusion Algorithm Using Frit and Pca: MIAO Qiguang WANG BaoshuDocumento5 pagineA Novel Image Fusion Algorithm Using Frit and Pca: MIAO Qiguang WANG BaoshuSathya PrakashNessuna valutazione finora
- Cont.: Fluid Mechanics (MR 231) Lecture NotesDocumento9 pagineCont.: Fluid Mechanics (MR 231) Lecture NotesAhmedTahaNessuna valutazione finora
- Fem Nptel Module 1Documento29 pagineFem Nptel Module 1Syed Ahmed KabeerNessuna valutazione finora
- Model Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellDocumento16 pagineModel Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellPhuor TyNessuna valutazione finora
- Vibrations of A Planar Truss Structure - Finite Element ApproachDocumento10 pagineVibrations of A Planar Truss Structure - Finite Element ApproachNIKHIL SHARMANessuna valutazione finora
- Three-Dimensional Beam Element Based On A Cross-Sectional Coordinate System ApproachDocumento17 pagineThree-Dimensional Beam Element Based On A Cross-Sectional Coordinate System Approachtadpole10Nessuna valutazione finora
- Drag On Basic ShapesDocumento6 pagineDrag On Basic ShapesVinoliaEdwinNessuna valutazione finora
- ME 8243 Midterm - AnswersDocumento8 pagineME 8243 Midterm - AnswersCryptic RifatNessuna valutazione finora
- Finite Element Method Isoperametric PDFDocumento16 pagineFinite Element Method Isoperametric PDFasd123456789asdcomNessuna valutazione finora
- Applied RVE Reconstruction and Homogenization of Heterogeneous MaterialsDa EverandApplied RVE Reconstruction and Homogenization of Heterogeneous MaterialsNessuna valutazione finora
- Practical Finite Element Modeling in Earth Science using MatlabDa EverandPractical Finite Element Modeling in Earth Science using MatlabNessuna valutazione finora
- Image Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionDa EverandImage Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionNessuna valutazione finora
- Pinhole Camera Model: Understanding Perspective through Computational OpticsDa EverandPinhole Camera Model: Understanding Perspective through Computational OpticsNessuna valutazione finora
- The Scaled Boundary Finite Element Method: Introduction to Theory and ImplementationDa EverandThe Scaled Boundary Finite Element Method: Introduction to Theory and ImplementationNessuna valutazione finora
- 3D Shape Analysis: Fundamentals, Theory, and ApplicationsDa Everand3D Shape Analysis: Fundamentals, Theory, and ApplicationsNessuna valutazione finora
- Planar Linkage Synthesis: A modern CAD based approachDa EverandPlanar Linkage Synthesis: A modern CAD based approachNessuna valutazione finora
- Qualitrol 900 910Documento6 pagineQualitrol 900 910chennupati999Nessuna valutazione finora
- Aspek Perpajakan Dalam Transfer Pricing: Related PapersDocumento15 pagineAspek Perpajakan Dalam Transfer Pricing: Related PapersHasrawati AzisNessuna valutazione finora
- Case Study To Find Tank Bulging, Radial Growth and Tank Settlement Using API 650Documento15 pagineCase Study To Find Tank Bulging, Radial Growth and Tank Settlement Using API 650Jafer SayedNessuna valutazione finora
- 02 Chapter 2 - Corporate Governance MechanismDocumento19 pagine02 Chapter 2 - Corporate Governance MechanismHanis ZahiraNessuna valutazione finora
- Flowrox Valve Solutions Catalogue E-VersionDocumento16 pagineFlowrox Valve Solutions Catalogue E-Versionjavier alvarezNessuna valutazione finora
- CH 15Documento58 pagineCH 15Chala1989Nessuna valutazione finora
- Sickle Cell DiseaseDocumento10 pagineSickle Cell DiseaseBrooke2014Nessuna valutazione finora
- Profibus Adapter Npba-02 Option/Sp Profibus Adapter Npba-02 Option/SpDocumento3 pagineProfibus Adapter Npba-02 Option/Sp Profibus Adapter Npba-02 Option/Spmelad yousefNessuna valutazione finora
- DN12278 - 5008 - Indicative Cable Way Route - Rev BDocumento9 pagineDN12278 - 5008 - Indicative Cable Way Route - Rev BArtjoms LusenkoNessuna valutazione finora
- ArrowrootDocumento8 pagineArrowrootSevi CameroNessuna valutazione finora
- Model Answer Winter 2015Documento38 pagineModel Answer Winter 2015Vivek MalwadeNessuna valutazione finora
- Assignment RoadDocumento14 pagineAssignment RoadEsya ImanNessuna valutazione finora
- Catalogue of Archaeological Finds FromDocumento67 pagineCatalogue of Archaeological Finds FromAdrinaNessuna valutazione finora
- SahanaDocumento1 paginaSahanamurthyarun1993Nessuna valutazione finora
- D. Das and S. Doniach - Existence of A Bose Metal at T 0Documento15 pagineD. Das and S. Doniach - Existence of A Bose Metal at T 0ImaxSWNessuna valutazione finora
- Nyamango Site Meeting 9 ReportDocumento18 pagineNyamango Site Meeting 9 ReportMbayo David GodfreyNessuna valutazione finora
- Navi-Planner User ManualDocumento331 pagineNavi-Planner User ManualRichard KershawNessuna valutazione finora
- LSL Education Center Final Exam 30 Minutes Full Name - Phone NumberDocumento2 pagineLSL Education Center Final Exam 30 Minutes Full Name - Phone NumberDilzoda Boytumanova.Nessuna valutazione finora
- ICU General Admission Orders: OthersDocumento2 pagineICU General Admission Orders: OthersHANIMNessuna valutazione finora
- Advanced Java SlidesDocumento134 pagineAdvanced Java SlidesDeepa SubramanyamNessuna valutazione finora
- P66 M10 CAT B Forms and Docs 04 10Documento68 pagineP66 M10 CAT B Forms and Docs 04 10VinayNessuna valutazione finora
- Modified Airdrop System Poster - CompressedDocumento1 paginaModified Airdrop System Poster - CompressedThiam HokNessuna valutazione finora
- Ransomware: Prevention and Response ChecklistDocumento5 pagineRansomware: Prevention and Response Checklistcapodelcapo100% (1)
- Ankle Injury EvaluationDocumento7 pagineAnkle Injury EvaluationManiDeep ReddyNessuna valutazione finora
- Shaqlawa Technical College: IT DepartmentDocumento20 pagineShaqlawa Technical College: IT Departmentbilind_mustafaNessuna valutazione finora
- Trading Journal TDA Branded.v3.5 - W - Total - Transaction - Cost - BlankDocumento49 pagineTrading Journal TDA Branded.v3.5 - W - Total - Transaction - Cost - BlankChristyann LojaNessuna valutazione finora
- CUET 2022 General Test 6th October Shift 1Documento23 pagineCUET 2022 General Test 6th October Shift 1Dhruv BhardwajNessuna valutazione finora
- Zambia National FormularlyDocumento188 pagineZambia National FormularlyAngetile Kasanga100% (1)
- List of Olympic MascotsDocumento10 pagineList of Olympic MascotsmukmukkumNessuna valutazione finora
- National Employment Policy, 2008Documento58 pagineNational Employment Policy, 2008Jeremia Mtobesya0% (1)