Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Airport and Runway Lighting Systems ExplainedDocumento4 pagineAirport and Runway Lighting Systems ExplainedSabareesh NairNessuna valutazione finora
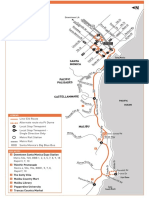
- Route 534 Santa Monica MalibuDocumento3 pagineRoute 534 Santa Monica MalibudazulzulNessuna valutazione finora
- BUSINESS PROJECT Bubble Car WashDocumento62 pagineBUSINESS PROJECT Bubble Car WashNur Husna100% (1)
- Comprehensive Development Plan 2011 20 FullDocumento61 pagineComprehensive Development Plan 2011 20 FullJem SacdalanNessuna valutazione finora
- Brand Audit of DHLDocumento33 pagineBrand Audit of DHLAyesha Khalid100% (1)
- TFMPelayoLopezGRUO PDFDocumento91 pagineTFMPelayoLopezGRUO PDFshivakumar bairojuNessuna valutazione finora
- Suggested Answers: Exercise 8 - 1Documento23 pagineSuggested Answers: Exercise 8 - 1Elsa MendozaNessuna valutazione finora
- Cseries: A Rising Star?: We Put Bombardier'S Narrowbody Contender Through Its PacesDocumento56 pagineCseries: A Rising Star?: We Put Bombardier'S Narrowbody Contender Through Its PaceslukeNessuna valutazione finora
- Case Study Pinto FiresDocumento7 pagineCase Study Pinto FiresdrzeeshanNessuna valutazione finora
- JetstarDocumento40 pagineJetstartuan nguyenNessuna valutazione finora
- Hotels in TirupatiDocumento24 pagineHotels in TirupatimNessuna valutazione finora
- copeland-stream-digital-compressors-4MFD-13x-to-4MKD-35x-6mmd-30x-to-6MKD-50x - DWMDocumento31 paginecopeland-stream-digital-compressors-4MFD-13x-to-4MKD-35x-6mmd-30x-to-6MKD-50x - DWMdenilson carvalho guimaraesNessuna valutazione finora
- C.C Road Estimates ExampleDocumento4 pagineC.C Road Estimates ExampleManiteja Reddy Tatipally100% (1)
- Joint Conference On Lifting Manned Hypervelocity and Reentry Vehicles - Volume IDocumento625 pagineJoint Conference On Lifting Manned Hypervelocity and Reentry Vehicles - Volume Iedu_chemaNessuna valutazione finora
- Resume Kevin BeattieDocumento3 pagineResume Kevin BeattieEric FoxNessuna valutazione finora
- BMTC Final ProjectDocumento117 pagineBMTC Final Projectseema100% (2)
- Contoh Sitac DocumentDocumento17 pagineContoh Sitac DocumentSkripsi DotUs50% (2)
- Manhole Cover Assembly, Bolted, Semi-Flush, Oiltight and WatertightDocumento6 pagineManhole Cover Assembly, Bolted, Semi-Flush, Oiltight and WatertightSaif Ullah KhanNessuna valutazione finora
- BOP Category GuideDocumento29 pagineBOP Category GuidePaul JohnNessuna valutazione finora
- Technical Specification DP SystemDocumento48 pagineTechnical Specification DP SystemAjay SinghNessuna valutazione finora
- January 21, 2015Documento12 pagineJanuary 21, 2015Maple Lake MessengerNessuna valutazione finora
- TBW Transport VocabularyDocumento1 paginaTBW Transport VocabularyZoe78Nessuna valutazione finora
- Pantai Ujung NegoroDocumento2 paginePantai Ujung Negoroaddien_com6570Nessuna valutazione finora
- Bye Laws PuneDocumento20 pagineBye Laws PuneSaurabh BadjateNessuna valutazione finora
- Rekindling Life Into The Urban Fabric A Case Study of The Cheonggyecheon Stream Restoration Project at Seoul, KoreaDocumento3 pagineRekindling Life Into The Urban Fabric A Case Study of The Cheonggyecheon Stream Restoration Project at Seoul, KoreaRashmiNessuna valutazione finora
- Pipelines Leak RepairDocumento6 paginePipelines Leak Repairathar_abbas_1100% (2)
- CN60 10TTDocumento84 pagineCN60 10TTjalage5043Nessuna valutazione finora
- Scientific American Architects and Builders Edition 1890 Jan-JunDocumento240 pagineScientific American Architects and Builders Edition 1890 Jan-JunNickiedeposieNessuna valutazione finora