Potrebbero piacerti anche
- Lecture 3 Example of Mechatronic SystemDocumento36 pagineLecture 3 Example of Mechatronic SystemIljuha9Nessuna valutazione finora
- Embedded Systems Design Lab4 - ARM Cortex M3Documento2 pagineEmbedded Systems Design Lab4 - ARM Cortex M3RagulANNessuna valutazione finora
- DMS UNIT I QB Answ KeyDocumento31 pagineDMS UNIT I QB Answ KeyRahul Valath100% (1)
- SEC Mechatronics Lab Manual R2013 Shan PDFDocumento93 pagineSEC Mechatronics Lab Manual R2013 Shan PDFMonish KumarNessuna valutazione finora
- Virtual Laboratory: Iit KharagpurDocumento19 pagineVirtual Laboratory: Iit KharagpurSENTHIL RNessuna valutazione finora
- Mechatronics Lab Manual Module 1: Introduction to Mechatronics and CNC MachinesDocumento105 pagineMechatronics Lab Manual Module 1: Introduction to Mechatronics and CNC Machineskbmn2Nessuna valutazione finora
- ESD FullDocumento932 pagineESD FullSlaney AguiarNessuna valutazione finora
- Sensor LabDocumento9 pagineSensor LabPranjal singhNessuna valutazione finora
- BITS Pilani: Reconfigurable Computing Es ZG 554 / Mel ZG 554 Session 1Documento23 pagineBITS Pilani: Reconfigurable Computing Es ZG 554 / Mel ZG 554 Session 1Rahamtulla MohammadNessuna valutazione finora
- Design of Mechatronics SystemsDocumento2 pagineDesign of Mechatronics Systemsmundu mustafa100% (1)
- Reconfigurable Computing Course OverviewDocumento18 pagineReconfigurable Computing Course OverviewroykvincentNessuna valutazione finora
- Hardware Software Co-Design: BITS PilaniDocumento26 pagineHardware Software Co-Design: BITS PilanimadhavNessuna valutazione finora
- DLD Lab Manual 01Documento6 pagineDLD Lab Manual 01Sana gullNessuna valutazione finora
- Unit 1 and 2 PPTsDocumento81 pagineUnit 1 and 2 PPTsKundankumar Saraf100% (2)
- Eesyll PDFDocumento130 pagineEesyll PDFDeepak DeepuNessuna valutazione finora
- EMG Machine AmplifierDocumento12 pagineEMG Machine AmplifierShauki AliNessuna valutazione finora
- Short Intro of MEMSDocumento135 pagineShort Intro of MEMSPrem Prakash SinghNessuna valutazione finora
- DMS QB 2015 RDocumento8 pagineDMS QB 2015 RKeerthe VaasanNessuna valutazione finora
- Control Systems and Instrumentation Lab GuideDocumento3 pagineControl Systems and Instrumentation Lab GuideskrtamilNessuna valutazione finora
- Mod 1.1Documento14 pagineMod 1.1Mr. K.S. Raghul Asst Prof MECHNessuna valutazione finora
- BioMEMS Lecture1-Sp07Documento53 pagineBioMEMS Lecture1-Sp07liang2012Nessuna valutazione finora
- Fuculty of Engineering Department: Instrumentoin and Control IDocumento15 pagineFuculty of Engineering Department: Instrumentoin and Control Ihappy sadNessuna valutazione finora
- Introduction To VLSI DesignDocumento33 pagineIntroduction To VLSI DesignAnonymous P9xMOgEYt1Nessuna valutazione finora
- Chapter 7 Numerical Control and Industrial RoboticsDocumento53 pagineChapter 7 Numerical Control and Industrial RoboticsYousab CreatorNessuna valutazione finora
- PSPICE WorkshopDocumento4 paginePSPICE WorkshopMelissa MillerNessuna valutazione finora
- Automation in Manufacturing 10ME757: Department of Mechanical Engineering, SIRMVIT (Ramesh C G & Hanamantraygouda M B)Documento193 pagineAutomation in Manufacturing 10ME757: Department of Mechanical Engineering, SIRMVIT (Ramesh C G & Hanamantraygouda M B)Wtf rajuNessuna valutazione finora
- Week 3 B 2 Electric MotorsDocumento59 pagineWeek 3 B 2 Electric MotorsCharlton S.InaoNessuna valutazione finora
- Solid State DevicesDocumento42 pagineSolid State Devicesmonirba48Nessuna valutazione finora
- Ch01intro To MechatronicsDocumento6 pagineCh01intro To MechatronicsElizabeth PaulNessuna valutazione finora
- ME 231 Computer Aided Machine DrawingDocumento2 pagineME 231 Computer Aided Machine DrawingDeepakNessuna valutazione finora
- SRM Valliammai Engineering College Question Bank on Sensors and TransducersDocumento12 pagineSRM Valliammai Engineering College Question Bank on Sensors and TransducersRevathy G100% (1)
- Important Questions and Answers - Robot Drive Systems and End Effectors PDFDocumento5 pagineImportant Questions and Answers - Robot Drive Systems and End Effectors PDFvicky tNessuna valutazione finora
- Adsp All ModuleDocumento175 pagineAdsp All Modulemohit bohra100% (1)
- Power Electronics &simulation Lab ManualDocumento51 paginePower Electronics &simulation Lab Manualarshia tabassumNessuna valutazione finora
- Assignment Brief and Feedback - Assignment3 - Unit22 (LO3 Oscillators) RevA - V1.2Documento5 pagineAssignment Brief and Feedback - Assignment3 - Unit22 (LO3 Oscillators) RevA - V1.2Davide JonesNessuna valutazione finora
- Experiment 1 Breadboard ImplementationDocumento3 pagineExperiment 1 Breadboard ImplementationJeremy Lorenzo Teodoro VirataNessuna valutazione finora
- Ec6464-Electronics and MicroprocessorsDocumento17 pagineEc6464-Electronics and MicroprocessorsskarthikmtechNessuna valutazione finora
- M&e 18me51 NotesDocumento156 pagineM&e 18me51 NotesRoman EmpireNessuna valutazione finora
- FAULT DETECTION AND CORRECTION METHODSDocumento8 pagineFAULT DETECTION AND CORRECTION METHODSAvinash BishtNessuna valutazione finora
- ED Module 1Documento41 pagineED Module 1ನಂದನ್ ಎಂ ಗೌಡNessuna valutazione finora
- ME 1402 - Mechatronics PDFDocumento6 pagineME 1402 - Mechatronics PDFnagarajanceNessuna valutazione finora
- Mechatronics - AbstractDocumento1 paginaMechatronics - AbstractPragathi Sundar100% (2)
- Dee3071 Electronic Computer Aided Design (Ecad) - SDocumento6 pagineDee3071 Electronic Computer Aided Design (Ecad) - Skshika meganathanNessuna valutazione finora
- Civsyll 2018 Syllabus PDFDocumento121 pagineCivsyll 2018 Syllabus PDFಗುರು ಪ್ರಶಾಂತ್Nessuna valutazione finora
- Part - A (5x 2 10 MARKS) Answer All Questions: Academic Year 2020-21 ODD OML751 Testing of MaterialsDocumento1 paginaPart - A (5x 2 10 MARKS) Answer All Questions: Academic Year 2020-21 ODD OML751 Testing of Materialsjamunaa83Nessuna valutazione finora
- Oan551 Sensors and Transducers Part B & Part C Questions - Unit WiseDocumento2 pagineOan551 Sensors and Transducers Part B & Part C Questions - Unit WiseSai KrishnaNessuna valutazione finora
- Mechatronics Merged Systems OverviewDocumento88 pagineMechatronics Merged Systems OverviewrajeshkumrmNessuna valutazione finora
- Computer Science and Engineering 1st YearDocumento11 pagineComputer Science and Engineering 1st YearGolamSarwarNessuna valutazione finora
- Ecad & Vlsi LabDocumento98 pagineEcad & Vlsi LabbitseceNessuna valutazione finora
- Mechatronics Lab ManualDocumento82 pagineMechatronics Lab ManualMahesh PatilNessuna valutazione finora
- Course Outline EE 434Documento3 pagineCourse Outline EE 434Ali SafdarNessuna valutazione finora
- MEMS Overview: Microsystems Combining Microelectronics and MicromechanicsDocumento3 pagineMEMS Overview: Microsystems Combining Microelectronics and MicromechanicsAditya Narayan SahooNessuna valutazione finora
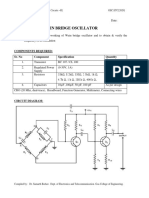
- Expt 5 - Wein Bridge Oscillator (2020)Documento3 pagineExpt 5 - Wein Bridge Oscillator (2020)samarthNessuna valutazione finora
- Hut310 Management For Engineers, June 2022Documento3 pagineHut310 Management For Engineers, June 2022Titus KjNessuna valutazione finora
- Dynamics of Rigid Bodies: Curvilinear Motion of ParticlesDocumento17 pagineDynamics of Rigid Bodies: Curvilinear Motion of ParticlesJoshua AngelesNessuna valutazione finora
- EI6704: UNIT 5 NotesDocumento19 pagineEI6704: UNIT 5 NotesMadhu MithaNessuna valutazione finora
- Ec6601 Notes Rejinpaul Ii PDFDocumento297 pagineEc6601 Notes Rejinpaul Ii PDFBajuNessuna valutazione finora
- SPM Chapter5Documento63 pagineSPM Chapter5KidusNessuna valutazione finora
- Course Title: Industrial Automation & Mechatronics Course Code: 6025 Course Category: E Periods/Week: 5 Periods/Semester: 75 Credits: 5Documento6 pagineCourse Title: Industrial Automation & Mechatronics Course Code: 6025 Course Category: E Periods/Week: 5 Periods/Semester: 75 Credits: 5VaisakVenugopalNessuna valutazione finora
- Form 1 Course OutlineDocumento5 pagineForm 1 Course OutlineMuhammad SumeetNessuna valutazione finora
- Csa CrosbyDocumento1 paginaCsa CrosbyĐường Một ChiềuNessuna valutazione finora
- Laboratory Ventilation Guide Single PageDocumento16 pagineLaboratory Ventilation Guide Single PageAnandababuNessuna valutazione finora
- ANNEX I of Machinery Directive 2006 - 42 - EC - Summary - Machinery Directive 2006 - 42 - CE - Functional Safety & ATEX Directive 2014 - 34 - EUDocumento6 pagineANNEX I of Machinery Directive 2006 - 42 - EC - Summary - Machinery Directive 2006 - 42 - CE - Functional Safety & ATEX Directive 2014 - 34 - EUAnandababuNessuna valutazione finora
- Lifting GuideDocumento59 pagineLifting GuideAnandababuNessuna valutazione finora
- Rapid Assessment For Computer Ergonomics: or Excessive Computer User?Documento1 paginaRapid Assessment For Computer Ergonomics: or Excessive Computer User?AnandababuNessuna valutazione finora
- Work at HeightDocumento2 pagineWork at HeightAnandababuNessuna valutazione finora
- Machine SafeguardingDocumento146 pagineMachine SafeguardingAnandababuNessuna valutazione finora
- Loler Matrix 2017 PDFDocumento1 paginaLoler Matrix 2017 PDFMulatua SiraitNessuna valutazione finora
- Calculation Soil Load Bearing For Crane OutriggersDocumento4 pagineCalculation Soil Load Bearing For Crane OutriggersAnandababuNessuna valutazione finora
- Cartoon - Change ManagementDocumento2 pagineCartoon - Change ManagementAnandababuNessuna valutazione finora
- Lecture 2-Env SamplingDocumento54 pagineLecture 2-Env SamplingAnandababuNessuna valutazione finora
- Beacon EnglishDocumento1 paginaBeacon EnglishHamam SahronieNessuna valutazione finora
- Lecture 3-Env SamplingDocumento48 pagineLecture 3-Env SamplingAnandababuNessuna valutazione finora
- Process Hazard AnalysisDocumento19 pagineProcess Hazard AnalysisAnandababuNessuna valutazione finora
- Simulataneous Operations or Co-ActivitiesDocumento2 pagineSimulataneous Operations or Co-ActivitiesAnandababuNessuna valutazione finora
- Biggest Mistakes Everyone Makes Using Excel Charts by Jay ArthurDocumento6 pagineBiggest Mistakes Everyone Makes Using Excel Charts by Jay ArthurAnandababuNessuna valutazione finora
- Principles of Management Quiz - 1 AnswersDocumento7 paginePrinciples of Management Quiz - 1 AnswersAnandababu100% (1)
- Fans BlowersDocumento143 pagineFans BlowersRoudy J. Mhawas50% (2)
- PPE Guide: (Personal Protective Gear)Documento20 paginePPE Guide: (Personal Protective Gear)Antonio ColonNessuna valutazione finora
- Importance of Managing TechnologyDocumento14 pagineImportance of Managing TechnologyAnandababuNessuna valutazione finora
- Quiz 1-Energy ManagementDocumento9 pagineQuiz 1-Energy ManagementAnandababuNessuna valutazione finora
- Quiz 1-Technical Report WritingDocumento9 pagineQuiz 1-Technical Report WritingAnandababuNessuna valutazione finora
- Thermal comfort standards overviewDocumento32 pagineThermal comfort standards overviewJean Carlos Gonzalez HernandezNessuna valutazione finora
- Construction Safety Webinar-03.04.20Documento23 pagineConstruction Safety Webinar-03.04.20AnandababuNessuna valutazione finora
- Guidelines On Disinfection of Common Public Places Including Offices (COVID 19)Documento6 pagineGuidelines On Disinfection of Common Public Places Including Offices (COVID 19)ManojNessuna valutazione finora
- Lecture 1 ETP Textile - verIIDocumento44 pagineLecture 1 ETP Textile - verIIAshok ThakkarNessuna valutazione finora
- Guia de Desinfecção CDC (EUA)Documento163 pagineGuia de Desinfecção CDC (EUA)Adriano BuenoNessuna valutazione finora
- Lean Supply Chain MGMT-LSCMDocumento45 pagineLean Supply Chain MGMT-LSCMAnandababuNessuna valutazione finora
- Checklist V3-CovidDocumento20 pagineChecklist V3-CovidAnandababuNessuna valutazione finora
- Pre-Employment Medical Examination FormDocumento2 paginePre-Employment Medical Examination FormAnandababu70% (10)
- Proceedings of ICVL 2016 (ISSN 1844-8933, ISI Proceedings)Documento416 pagineProceedings of ICVL 2016 (ISSN 1844-8933, ISI Proceedings)Marin VladaNessuna valutazione finora
- SACC Booklet - Annual Gala 2018Documento28 pagineSACC Booklet - Annual Gala 2018Sikh ChamberNessuna valutazione finora
- Educational Services Post Secondary Education Award Ma000075 Pay GuideDocumento34 pagineEducational Services Post Secondary Education Award Ma000075 Pay Guiderabi1973Nessuna valutazione finora
- Предметно-интегрированное обучение (Clil: Content And Language Integrated Learning) английскому языку на основе применения дистанционных образовательных технологийDocumento45 pagineПредметно-интегрированное обучение (Clil: Content And Language Integrated Learning) английскому языку на основе применения дистанционных образовательных технологийНазерке ЧабденоваNessuna valutazione finora
- CHN Theories and Models ExplainedDocumento75 pagineCHN Theories and Models ExplainedhemihemaNessuna valutazione finora
- TLE Beauty Care (Nail Care) Services: Department of Education - Republic of The PhilippinesDocumento38 pagineTLE Beauty Care (Nail Care) Services: Department of Education - Republic of The PhilippinesREYNOLD MILLONDAGA100% (2)
- Spring 2012Documento16 pagineSpring 2012JoleteNessuna valutazione finora
- WISC-IV Guide Unveils Changes to Intelligence TestDocumento80 pagineWISC-IV Guide Unveils Changes to Intelligence TestCadariu MihaelaNessuna valutazione finora
- Zee Learn Annual Report PDFDocumento122 pagineZee Learn Annual Report PDFPega Sus CpsNessuna valutazione finora
- The Snowy Day - Lesson Plan EditedDocumento5 pagineThe Snowy Day - Lesson Plan Editedapi-242586984Nessuna valutazione finora
- List of PrintersDocumento3 pagineList of Printersfdalapo9985Nessuna valutazione finora
- The Syndetic Paradigm: Robert AzizDocumento334 pagineThe Syndetic Paradigm: Robert AzizBrian S. Danzyger100% (1)
- Luck or Hard Work?Documento3 pagineLuck or Hard Work?bey luNessuna valutazione finora
- 9arts GR 10 LM - Qtr4 (8 Apr 2015)Documento18 pagine9arts GR 10 LM - Qtr4 (8 Apr 2015)John Carlo Benitez100% (2)
- PA Part 1 Market StructureDocumento19 paginePA Part 1 Market Structurealejandro behr100% (1)
- Thank You Letter Thesis CommitteeDocumento8 pagineThank You Letter Thesis Committeenorahernandezpeoria100% (1)
- Resume - CarlyDocumento1 paginaResume - Carlyapi-317491156Nessuna valutazione finora
- Natalie Alwin BMT Resume SusieDocumento1 paginaNatalie Alwin BMT Resume Susieapi-340258456Nessuna valutazione finora
- Letter Regarding Expelled Boulder Fraternity ChaptersDocumento3 pagineLetter Regarding Expelled Boulder Fraternity ChaptersSarah KutaNessuna valutazione finora
- Jacqueline Dattoma - ResumeDocumento2 pagineJacqueline Dattoma - Resumeapi-384691903Nessuna valutazione finora
- Free E Book India 2011Documento414 pagineFree E Book India 2011RameshThangarajNessuna valutazione finora
- University of Asmara Graduation - July 1996Documento80 pagineUniversity of Asmara Graduation - July 1996Ibrahim Ali100% (2)
- Pass4sure 400-101Documento16 paginePass4sure 400-101Emmalee22Nessuna valutazione finora
- 221 Meeting Minutes FinalDocumento157 pagine221 Meeting Minutes FinalKrishna Kumar MishraNessuna valutazione finora
- Affirmative ActionDocumento23 pagineAffirmative ActionUtkarsh Mani TripathiNessuna valutazione finora
- Learning Suite Roadmap 2013-2018 in 40 CharactersDocumento1 paginaLearning Suite Roadmap 2013-2018 in 40 CharactersThirumaleshwara M ShastryNessuna valutazione finora
- UGC Annual Report - 2011-2012Documento484 pagineUGC Annual Report - 2011-2012deepak4evolutionNessuna valutazione finora
- Constructionism Learning by Design and PDocumento18 pagineConstructionism Learning by Design and PKostas BezaitisNessuna valutazione finora
- Investment Strategies and Portfolio ManagementDocumento9 pagineInvestment Strategies and Portfolio ManagementRubi ZimmermanNessuna valutazione finora
- Data Warehousing and Mining Lab ManualDocumento96 pagineData Warehousing and Mining Lab Manuals krishna raoNessuna valutazione finora