Potrebbero piacerti anche
- AVR Timers0Documento32 pagineAVR Timers0Muhammad ejaz RamzanNessuna valutazione finora
- Atmega328 Timer/Counter Usage: Sistemas Embebidos Oscar Acevedo, PHDDocumento10 pagineAtmega328 Timer/Counter Usage: Sistemas Embebidos Oscar Acevedo, PHDBrisman Ricardo Palacin VargasNessuna valutazione finora
- ES Exp 10Documento13 pagineES Exp 10Maryam TariqNessuna valutazione finora
- Experiment No.: 6: To Implement Timer and Counter Programming For Avr Atmega32Documento9 pagineExperiment No.: 6: To Implement Timer and Counter Programming For Avr Atmega32Dhrumil ManiyarNessuna valutazione finora
- Timer0 Code ATmega328pDocumento3 pagineTimer0 Code ATmega328pmladen divacNessuna valutazione finora
- MoreTimers PDFDocumento46 pagineMoreTimers PDFGiuseppeNessuna valutazione finora
- 5c AVR Timer (16 Bit)Documento78 pagine5c AVR Timer (16 Bit)Muhammad BilalNessuna valutazione finora
- MPSI Quiz2 SolutionDocumento2 pagineMPSI Quiz2 SolutionIman HayatNessuna valutazione finora
- AVR Timers CTC ModeDocumento11 pagineAVR Timers CTC ModeMohamed AshrafNessuna valutazione finora
- Timers of ATmega328PDocumento26 pagineTimers of ATmega328PZaryab Khalil SiddiqueNessuna valutazione finora
- 12 TimersDocumento21 pagine12 TimersahmetakdoganNessuna valutazione finora
- JamDocumento3 pagineJamteknis kompNessuna valutazione finora
- Timers: Lecture# 12 Microprocessor Systems and InterfacingDocumento20 pagineTimers: Lecture# 12 Microprocessor Systems and InterfacingMahreenNessuna valutazione finora
- 16 Bit Tim.& Coun.Documento22 pagine16 Bit Tim.& Coun.Dileep guptaNessuna valutazione finora
- AVR Timer/Counter: Prof Prabhat Ranjan DA-IICT, GandhinagarDocumento40 pagineAVR Timer/Counter: Prof Prabhat Ranjan DA-IICT, GandhinagardangkhuyenmaiNessuna valutazione finora
- Embedded Systems: Engr. Rashid Farid ChishtiDocumento46 pagineEmbedded Systems: Engr. Rashid Farid Chishtiaamir masoodNessuna valutazione finora
- AVR 133: Long Delay Generation Using The AVR MicrocontrollerDocumento8 pagineAVR 133: Long Delay Generation Using The AVR MicrocontrollernicoletabytaxNessuna valutazione finora
- PWMDocumento17 paginePWMmaintboardNessuna valutazione finora
- 5b AVR Timer (16 Bit) PDFDocumento39 pagine5b AVR Timer (16 Bit) PDFzohaibshabirNessuna valutazione finora
- AUTO3230 Embedded Systems: Staircase Light ProjectDocumento13 pagineAUTO3230 Embedded Systems: Staircase Light ProjectKabinad TeshagerNessuna valutazione finora
- 8 Bit Timer CountorDocumento11 pagine8 Bit Timer CountorDileep guptaNessuna valutazione finora
- 9 TimerCounter v2Documento35 pagine9 TimerCounter v2Ulises RosaNessuna valutazione finora
- PWM Freq Arduino DueDocumento9 paginePWM Freq Arduino DueEdgar Eduardo Medina CastañedaNessuna valutazione finora
- Microcontrollers LabDocumento19 pagineMicrocontrollers LabAMARNATHNAIDU77Nessuna valutazione finora
- Ch09 AVR Timer Programming in Assembly and CDocumento43 pagineCh09 AVR Timer Programming in Assembly and CHina Imtiaz100% (3)
- PWM Atmega8Documento8 paginePWM Atmega8mostafa_s37893Nessuna valutazione finora
- Avr ArchitectureDocumento29 pagineAvr ArchitectureOdoch HerbertNessuna valutazione finora
- 8-Bit Timer/Counter 0: 32Khz CrystalDocumento10 pagine8-Bit Timer/Counter 0: 32Khz CrystalAnasNessuna valutazione finora
- HBridgeMotorControl With PICDocumento11 pagineHBridgeMotorControl With PICcoceicr100% (3)
- Micro Lab 6Documento10 pagineMicro Lab 6Hacker YousafzaiNessuna valutazione finora
- Ard TimersDocumento60 pagineArd TimersMarcio Augusto BerenguelNessuna valutazione finora
- Arduino Timer InterruptsDocumento18 pagineArduino Timer InterruptsJose Luis SabinoNessuna valutazione finora
- EE470 Microcontrollers and Embedded SystemsDocumento16 pagineEE470 Microcontrollers and Embedded SystemsOsama TobasyNessuna valutazione finora
- roject mẫu AVR2Documento58 pagineroject mẫu AVR2luuvuduc81Nessuna valutazione finora
- Chap10 13 tmr2 PWMDocumento38 pagineChap10 13 tmr2 PWMThanh LeNessuna valutazione finora
- MSP430 Timers and PWMDocumento13 pagineMSP430 Timers and PWManhhungkenNessuna valutazione finora
- Lab05 ADCDocumento23 pagineLab05 ADCChoco LocoNessuna valutazione finora
- DOCUMENTOS PARA EXAMENES 2do PARCIALDocumento12 pagineDOCUMENTOS PARA EXAMENES 2do PARCIALPaul Diaz EstradaNessuna valutazione finora
- HCS12 Timer System PDFDocumento15 pagineHCS12 Timer System PDFAbhinav KaranNessuna valutazione finora
- Lec06 SlidesDocumento13 pagineLec06 SlidesHenrique PatriotaNessuna valutazione finora
- 05 AVR Timer-Counter AVRDocumento95 pagine05 AVR Timer-Counter AVRPriscillaNessuna valutazione finora
- Programming 16 Bit Timer On Atmega328Documento9 pagineProgramming 16 Bit Timer On Atmega328VisitOn.T.witte.r100% (1)
- Topic 12 - ATMega32 Timer in C (ISMAIL - FKEUTM 2017)Documento55 pagineTopic 12 - ATMega32 Timer in C (ISMAIL - FKEUTM 2017)Aya Amir100% (1)
- Serial Comm in 8051Documento21 pagineSerial Comm in 8051HarshaNessuna valutazione finora
- PIC18F4550 PWM - PIC ControllersDocumento7 paginePIC18F4550 PWM - PIC ControllersKrishanu Modak100% (2)
- PWM On The ATmega328Documento10 paginePWM On The ATmega328dardosordiNessuna valutazione finora
- Timer Counter AVRDocumento105 pagineTimer Counter AVRفايزميلي الأبد100% (1)
- 5a-AVR-Timers (8 Bit)Documento32 pagine5a-AVR-Timers (8 Bit)Muhammad BilalNessuna valutazione finora
- APSC 1299 Test 2 - Spring 2011 AnswersDocumento7 pagineAPSC 1299 Test 2 - Spring 2011 AnswersJonathan WongNessuna valutazione finora
- IA2 - Scheme & Sol MC - by TauseefDocumento6 pagineIA2 - Scheme & Sol MC - by Tauseefjvgirish74Nessuna valutazione finora
- CSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Documento17 pagineCSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Santosh Kumar GowdaNessuna valutazione finora
- PWM Atmega328Documento30 paginePWM Atmega328JUNIOR700Nessuna valutazione finora
- Timer Interrupts: Arduino, ESP8266 & Raspberry Pi StuffDocumento62 pagineTimer Interrupts: Arduino, ESP8266 & Raspberry Pi StuffMike Thomson100% (1)
- 8051-CH9-TimePmg in Assem & CDocumento101 pagine8051-CH9-TimePmg in Assem & CshivaspyNessuna valutazione finora
- Timers On The ATmega168 - 328 - QEEWikiDocumento9 pagineTimers On The ATmega168 - 328 - QEEWikiRalphEdwardMagoNessuna valutazione finora
- 8051 Microcontroller & Programming in C: Presented By: Rana Das N Abhijit Suman Pal Guided By: BappaditaDocumento21 pagine8051 Microcontroller & Programming in C: Presented By: Rana Das N Abhijit Suman Pal Guided By: BappaditaranaNessuna valutazione finora
- Projects With Microcontrollers And PICCDa EverandProjects With Microcontrollers And PICCValutazione: 5 su 5 stelle5/5 (1)
- Completare Furmulra Erasmus KA1Documento23 pagineCompletare Furmulra Erasmus KA1Mircea TirziuNessuna valutazione finora
- ! Acupunctura, Biopac, Guide-electrodermal-ActivityDocumento42 pagine! Acupunctura, Biopac, Guide-electrodermal-ActivityMircea TirziuNessuna valutazione finora
- Blogging BloguriDocumento2 pagineBlogging BloguriMircea TirziuNessuna valutazione finora
- Proiect Erasmus DetaliatDocumento95 pagineProiect Erasmus DetaliatMircea TirziuNessuna valutazione finora
- Dell Latitude d630 Servisni Manua enDocumento43 pagineDell Latitude d630 Servisni Manua enEnache AlexandruNessuna valutazione finora
- ! Proiect Descris Detaliat 2Documento182 pagine! Proiect Descris Detaliat 2Mircea TirziuNessuna valutazione finora
- Latitude-D630 User Manual 4Documento69 pagineLatitude-D630 User Manual 4ga phNessuna valutazione finora
- Arduino DateDocumento11 pagineArduino DateMircea TirziuNessuna valutazione finora
- Resetare Cartuse Si Imprimanta CanonDocumento3 pagineResetare Cartuse Si Imprimanta CanonMircea TirziuNessuna valutazione finora
- GUI For Raspberry Pi PythonDocumento4 pagineGUI For Raspberry Pi PythonMircea TirziuNessuna valutazione finora
- Raspberry Pi, ReteleDocumento11 pagineRaspberry Pi, ReteleMircea TirziuNessuna valutazione finora
- HELP Muzica Teorie FrecventeDocumento20 pagineHELP Muzica Teorie FrecventeMircea TirziuNessuna valutazione finora
- Resetare Cartuse Si Imprimanta CanonDocumento3 pagineResetare Cartuse Si Imprimanta CanonMircea TirziuNessuna valutazione finora
- Moac Word2013 Exam 77 418Documento524 pagineMoac Word2013 Exam 77 418api-249867251Nessuna valutazione finora
- Centrala Electrica Tabel Excel Calcul CalorifereDocumento23 pagineCentrala Electrica Tabel Excel Calcul CalorifereMircea TirziuNessuna valutazione finora
- Raspberry WiringPiDocumento26 pagineRaspberry WiringPiMircea TirziuNessuna valutazione finora
- Creare Partiţii GPT Pentru Uefi: Easeus Partition MasterDocumento4 pagineCreare Partiţii GPT Pentru Uefi: Easeus Partition MasterMircea TirziuNessuna valutazione finora
- Seriale Nod32Documento2 pagineSeriale Nod32Mircea TirziuNessuna valutazione finora
- Help Foto Si Grafica BuneDocumento45 pagineHelp Foto Si Grafica BuneMircea TirziuNessuna valutazione finora
- Medicatie Pentru SomnDocumento11 pagineMedicatie Pentru SomnMircea TirziuNessuna valutazione finora
- Timer IntreruperiDocumento4 pagineTimer IntreruperiMircea TirziuNessuna valutazione finora
- PIXMA Ip5200 PIXMA iP5200R: Service ManualDocumento64 paginePIXMA Ip5200 PIXMA iP5200R: Service ManualmatmaricNessuna valutazione finora
- Wiz Pocket Neurobiotics Achizitie Biosemnale EEG 4 Canale ManualDocumento24 pagineWiz Pocket Neurobiotics Achizitie Biosemnale EEG 4 Canale ManualMircea TirziuNessuna valutazione finora
- Workshop Alice - Agenda 26 Octombrie PDFDocumento1 paginaWorkshop Alice - Agenda 26 Octombrie PDFMircea TirziuNessuna valutazione finora
- ! HELP Engleza GRAMATICA Mircea TirziuDocumento7 pagine! HELP Engleza GRAMATICA Mircea TirziuMircea TirziuNessuna valutazione finora
- Apex Installation GuideDocumento90 pagineApex Installation GuideAshish KumarNessuna valutazione finora
- ! HELP Engleza GRAMATICA Mircea TirziuDocumento7 pagine! HELP Engleza GRAMATICA Mircea TirziuMircea TirziuNessuna valutazione finora
- ! MPLAB Help 2006 UtilDocumento7 pagine! MPLAB Help 2006 UtilMircea TirziuNessuna valutazione finora
- Behringer FX2000-Product InfoDocumento10 pagineBehringer FX2000-Product Infogotti45Nessuna valutazione finora
- Design of Slab FormsDocumento27 pagineDesign of Slab FormsZevanyaRolandTualaka100% (1)
- Lesson Plan 2Documento3 pagineLesson Plan 2api-260894328Nessuna valutazione finora
- TravelerSafe ReadMe PDFDocumento17 pagineTravelerSafe ReadMe PDFnatadevxNessuna valutazione finora
- Samsung SSD 850 EVO M2 Data Sheet Rev2Documento4 pagineSamsung SSD 850 EVO M2 Data Sheet Rev2Piyush ShrivastavaNessuna valutazione finora
- Jurnal Perancangan Multimedia InteraktifDocumento14 pagineJurnal Perancangan Multimedia InteraktifwilliamNessuna valutazione finora
- What Is A Bioclimatic Chart - EHowDocumento2 pagineWhat Is A Bioclimatic Chart - EHowonkhgfg kjhh jghNessuna valutazione finora
- Collateral Document Management System: User'S ManualDocumento10 pagineCollateral Document Management System: User'S ManualGerard DGNessuna valutazione finora
- Jntu Hyderabad - 2010 Dec - 07a51404 Kinematicsofmachineryfr 3180Documento10 pagineJntu Hyderabad - 2010 Dec - 07a51404 Kinematicsofmachineryfr 3180bbkNessuna valutazione finora
- NCHRP Report 507Documento87 pagineNCHRP Report 507Yoshua YangNessuna valutazione finora
- Accomplishment Report in ESPDocumento7 pagineAccomplishment Report in ESPAldrin Perez85% (39)
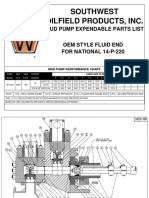
- Oem National 14-P-220 7500psiDocumento9 pagineOem National 14-P-220 7500psiandrew0% (1)
- 9591-102-102-PVM-U-009-02A Nox CalculationsDocumento16 pagine9591-102-102-PVM-U-009-02A Nox CalculationsVijay PalNessuna valutazione finora
- Chapter-2 Keyless MotorcycleDocumento27 pagineChapter-2 Keyless MotorcyclePatrick Jimenez100% (3)
- LabVIEW Project Report Complete HPK Kumar DetailedDocumento62 pagineLabVIEW Project Report Complete HPK Kumar DetailedDanny Vu75% (4)
- C8813 ÇDocumento39 pagineC8813 ÇZawHtet Aung100% (1)
- A Novel Compliant Linear-Motion Mechanism Based On Parasitic MOTION COMPESATIONDocumento14 pagineA Novel Compliant Linear-Motion Mechanism Based On Parasitic MOTION COMPESATIONalfonsoNessuna valutazione finora
- On Phase ChangesDocumento28 pagineOn Phase Changesapi-313517608Nessuna valutazione finora
- 4 Litre Closed SamplersDocumento3 pagine4 Litre Closed Samplerslimhockkin3766Nessuna valutazione finora
- GCCE RaptorDocumento4 pagineGCCE RaptorSayidina PanjaitanNessuna valutazione finora
- Substation Construction MethodologyDocumento23 pagineSubstation Construction Methodologyhusktech67% (15)
- PCBA-WP543HV HW Manual Rev1.05Documento21 paginePCBA-WP543HV HW Manual Rev1.05Surapong Pongchaiprateep100% (1)
- HDPE Pipe InstallationDocumento7 pagineHDPE Pipe InstallationJeferson Binay-an100% (1)
- Welding Machine Project Report FinalDocumento44 pagineWelding Machine Project Report FinalJAYAPRABHAKARAN N NNessuna valutazione finora
- Operating Instructions Back Pressure Regulator Series: BPR: Holter RegelarmaturenDocumento19 pagineOperating Instructions Back Pressure Regulator Series: BPR: Holter Regelarmaturenamin100% (2)
- ABB Surge Arrester MWK - Data Sheet 1HC0075865 E01 ABDocumento5 pagineABB Surge Arrester MWK - Data Sheet 1HC0075865 E01 ABsriniNessuna valutazione finora
- IEEE Conf 2018 TrackNet - A - Deep - Learning - Based - Fault - Detection - For - Railway - Track - InspectionDocumento5 pagineIEEE Conf 2018 TrackNet - A - Deep - Learning - Based - Fault - Detection - For - Railway - Track - InspectionkaruldeepaNessuna valutazione finora
- PCD 2 MarksDocumento23 paginePCD 2 MarksVignesh VickyNessuna valutazione finora
- OZONE 70W Programmable LED Drivers :: ROAL Living EnergyDocumento12 pagineOZONE 70W Programmable LED Drivers :: ROAL Living EnergyroalscribdNessuna valutazione finora