Potrebbero piacerti anche
- Robot Manipulators: Modeling, Performance Analysis and ControlDa EverandRobot Manipulators: Modeling, Performance Analysis and ControlNessuna valutazione finora
- GearsDocumento25 pagineGearsDarwin LimNessuna valutazione finora
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisDa EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNessuna valutazione finora
- Spur Gear Fatigue LifeDocumento7 pagineSpur Gear Fatigue LifeGamini SureshNessuna valutazione finora
- 5.0 GearsDocumento9 pagine5.0 GearsMaggy IrunguNessuna valutazione finora
- Chap-6 Gears 1Documento30 pagineChap-6 Gears 1AlysNessuna valutazione finora
- Rajesh Final Book@28!11!16Documento168 pagineRajesh Final Book@28!11!16rajeshNessuna valutazione finora
- Machine Design & Drawing - II - GEARSDocumento12 pagineMachine Design & Drawing - II - GEARSSenthil KumarNessuna valutazione finora
- GearDocumento21 pagineGeardaniel hambissaNessuna valutazione finora
- Gear MeasurementDocumento12 pagineGear MeasurementCobra BabaNessuna valutazione finora
- Load Sharing Based Fillet Stress Analysis of Involute Helical GearsDocumento5 pagineLoad Sharing Based Fillet Stress Analysis of Involute Helical GearsR Prabhu SekarNessuna valutazione finora
- Design Consideration of Transmisson SystemDocumento39 pagineDesign Consideration of Transmisson SystemKaung KhantNessuna valutazione finora
- BevelDocumento20 pagineBevelOmer NadeemNessuna valutazione finora
- University of Hail: Gears - GeneralDocumento51 pagineUniversity of Hail: Gears - GeneralROBINNessuna valutazione finora
- Chapter 3Documento14 pagineChapter 3Kaung KhantNessuna valutazione finora
- Gear Trains: Qassim University Unayzah College of Engineering Mechanical Engineering DeptDocumento42 pagineGear Trains: Qassim University Unayzah College of Engineering Mechanical Engineering DeptDanialNessuna valutazione finora
- Dynamic Simulation of Meshing Force in Broken Tooth Involute Gear Meshing Process Based On ADAMSDocumento4 pagineDynamic Simulation of Meshing Force in Broken Tooth Involute Gear Meshing Process Based On ADAMSAsha VenkataramNessuna valutazione finora
- Research Article Design and Investigation of An Asymmetric Logarithmic Spiral Gear DriveDocumento15 pagineResearch Article Design and Investigation of An Asymmetric Logarithmic Spiral Gear DriveAHMED WALIDNessuna valutazione finora
- Chapter 9 Spur Gear DesignDocumento27 pagineChapter 9 Spur Gear Designagung badoNessuna valutazione finora
- Introduction To Mechanisms: 7 GearsDocumento15 pagineIntroduction To Mechanisms: 7 GearsgauravthamanNessuna valutazione finora
- DVGDocumento53 pagineDVGbalajigandhirajanNessuna valutazione finora
- Hypoid Gears With Involute Teeth: David B. DoonerDocumento6 pagineHypoid Gears With Involute Teeth: David B. DoonerLibardo Cardenas PNessuna valutazione finora
- Helical Gears: (Buckingham) Book)Documento18 pagineHelical Gears: (Buckingham) Book)govindarajan017100% (1)
- Universidad Autónoma de Querétaro.: Facultad de Ingeniería. Ingeniería ElectromecánicaDocumento16 pagineUniversidad Autónoma de Querétaro.: Facultad de Ingeniería. Ingeniería ElectromecánicaSalvador Vega MancillaNessuna valutazione finora
- Bevel GearDocumento28 pagineBevel Gearmahesh kitturNessuna valutazione finora
- TEMERADocumento6 pagineTEMERATahir FadhilNessuna valutazione finora
- ZEIT3700 Notes Gearing 1Documento6 pagineZEIT3700 Notes Gearing 1ghufran015580Nessuna valutazione finora
- Gear TerminologyDocumento42 pagineGear Terminologyyair Enrique Romero OspinoNessuna valutazione finora
- 7 Gears: 7.1 Gear ClassificationDocumento10 pagine7 Gears: 7.1 Gear ClassificationAshish SinglaNessuna valutazione finora
- ME324 Lecture5Documento66 pagineME324 Lecture5Jam Maica TuboNessuna valutazione finora
- Conjugate Tooth-1-2 PDFDocumento8 pagineConjugate Tooth-1-2 PDFHarshavardhan Kutal100% (1)
- UntitledDocumento16 pagineUntitledDavid DjNessuna valutazione finora
- Gear Backlash: 6.1 Types of BacklashesDocumento13 pagineGear Backlash: 6.1 Types of BacklashesRamazan MERALNessuna valutazione finora
- Gear Classification: Page - 1Documento12 pagineGear Classification: Page - 1maloyNessuna valutazione finora
- Gang ADocumento46 pagineGang Aganga6013Nessuna valutazione finora
- GearsDocumento46 pagineGearsNarender NarruNessuna valutazione finora
- Gears: Looking For GATE Preparation Material? Join & Get Here Now!Documento8 pagineGears: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniNessuna valutazione finora
- Introduction To Mechanisms: 7 GearsDocumento15 pagineIntroduction To Mechanisms: 7 GearsDezert EagleNessuna valutazione finora
- Gear ModuleDocumento4 pagineGear ModuleAakash KarkiNessuna valutazione finora
- Design of Differential For Automobile Teaching Aid: © AUG 2019 - IRE Journals - Volume 3 Issue 2 - ISSN: 2456-8880Documento6 pagineDesign of Differential For Automobile Teaching Aid: © AUG 2019 - IRE Journals - Volume 3 Issue 2 - ISSN: 2456-8880Obaida BawezNessuna valutazione finora
- 2 Marks: Q & A Spur Gear Terminology and DefinitionsDocumento71 pagine2 Marks: Q & A Spur Gear Terminology and DefinitionsPrasanna Sekar0% (1)
- Unit 11Documento36 pagineUnit 11Sandeep PrajapatiNessuna valutazione finora
- 7 Gears: 7.1 Gear ClassificationDocumento15 pagine7 Gears: 7.1 Gear ClassificationSimrit Kaur MakanNessuna valutazione finora
- GEARSDocumento46 pagineGEARSsrsoumyankNessuna valutazione finora
- Gears Nomenclature: by Feedback by Comments 1 MahekDocumento20 pagineGears Nomenclature: by Feedback by Comments 1 MahekSujai BaskarNessuna valutazione finora
- Gears Nomenclature: by Feedback by Comments 1 MahekDocumento20 pagineGears Nomenclature: by Feedback by Comments 1 MahekSujai BaskarNessuna valutazione finora
- IN 2020 AkashDocumento12 pagineIN 2020 AkashSriram SundarNessuna valutazione finora
- International Journal of Computational Engineering Research (IJCER)Documento7 pagineInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Nessuna valutazione finora
- Kom May-June 2013Documento8 pagineKom May-June 2013nazeerabiaNessuna valutazione finora
- Theory of Machine: Toothed GearingDocumento14 pagineTheory of Machine: Toothed GearingRs SumitNessuna valutazione finora
- Chapter 9 Spur Gear DesignDocumento122 pagineChapter 9 Spur Gear DesignJimmy Silvera OtañeNessuna valutazione finora
- Design of Helical and Bevel GearDocumento53 pagineDesign of Helical and Bevel GearPRANAY SHRIDHAR100% (1)
- Helical GearsDocumento24 pagineHelical GearsPrakash Joshi88% (8)
- ME 308 Machine Elements Ii: 26.04.2012 Chapter 5 Spur Gears 1Documento31 pagineME 308 Machine Elements Ii: 26.04.2012 Chapter 5 Spur Gears 1Nihat YildirimNessuna valutazione finora
- Toothed Gearing: (Chapter-12 R.S. KHURMI)Documento35 pagineToothed Gearing: (Chapter-12 R.S. KHURMI)Somnath Somadder100% (1)
- Study On The Meshing Force of Misaligned Gear CouplingDocumento7 pagineStudy On The Meshing Force of Misaligned Gear CouplingnilsNessuna valutazione finora
- Chapter 4 Gear DrivesDocumento65 pagineChapter 4 Gear DrivesabebawalemkerNessuna valutazione finora
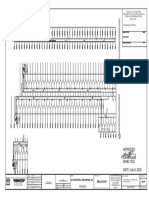
- m2-02 Stair Fireman's Lift Pressurization-1351m2-03-1Documento1 paginam2-02 Stair Fireman's Lift Pressurization-1351m2-03-1Darwin LimNessuna valutazione finora
- Office of The Building Official: Cebu CityDocumento1 paginaOffice of The Building Official: Cebu CityDarwin LimNessuna valutazione finora
- Container Quantities: All Standard Bolts Except Lag ScrewsDocumento1 paginaContainer Quantities: All Standard Bolts Except Lag ScrewsDarwin LimNessuna valutazione finora
- M0 Drawing Index, Abbreviation, Legend and SymbolsDocumento1 paginaM0 Drawing Index, Abbreviation, Legend and SymbolsDarwin LimNessuna valutazione finora
- Riala T4 - Re-Entry & No Re-EntryDocumento37 pagineRiala T4 - Re-Entry & No Re-EntryDarwin LimNessuna valutazione finora
- Behold The Technique1Documento30 pagineBehold The Technique1Darwin LimNessuna valutazione finora
- Health and Safety For The Meat Industry: Guidance NotesDocumento198 pagineHealth and Safety For The Meat Industry: Guidance NotesPredrag AndjelkovicNessuna valutazione finora
- Financial Accounting 1: Chapter 5 Cash and Short Term InvestmentDocumento31 pagineFinancial Accounting 1: Chapter 5 Cash and Short Term InvestmentCabdiraxmaan GeeldoonNessuna valutazione finora
- Ds-Module 5 Lecture NotesDocumento12 pagineDs-Module 5 Lecture NotesLeela Krishna MNessuna valutazione finora
- Lateritic NickelDocumento27 pagineLateritic NickelRAVI1972100% (2)
- UnixDocumento251 pagineUnixAnkush AgarwalNessuna valutazione finora
- Lecture Notes 3A - Basic Concepts of Crystal Structure 2019Documento19 pagineLecture Notes 3A - Basic Concepts of Crystal Structure 2019Lena BacaniNessuna valutazione finora
- Research Paper On Air QualityDocumento4 pagineResearch Paper On Air Qualityluwahudujos3100% (1)
- CSEC SocStud CoverSheetForESBA Fillable Dec2019Documento1 paginaCSEC SocStud CoverSheetForESBA Fillable Dec2019chrissaineNessuna valutazione finora
- Chem Resist ChartDocumento13 pagineChem Resist ChartRC LandaNessuna valutazione finora
- Frequency Response For Control System Analysis - GATE Study Material in PDFDocumento7 pagineFrequency Response For Control System Analysis - GATE Study Material in PDFNarendra AgrawalNessuna valutazione finora
- Usm 1Documento47 pagineUsm 1Abhishek KumarNessuna valutazione finora
- Paramount Healthcare Management Private Limited: First Reminder Letter Without PrejudiceDocumento1 paginaParamount Healthcare Management Private Limited: First Reminder Letter Without PrejudiceSwapnil TiwariNessuna valutazione finora
- Ac221 and Ac211 CourseoutlineDocumento10 pagineAc221 and Ac211 CourseoutlineLouis Maps MapangaNessuna valutazione finora
- Toxemias of PregnancyDocumento3 pagineToxemias of PregnancyJennelyn LumbreNessuna valutazione finora
- 2013 Cases Penned by Justice BernabeDocumento11 pagine2013 Cases Penned by Justice BernabeJoan PabloNessuna valutazione finora
- Jurnal Ekologi TerestrialDocumento6 pagineJurnal Ekologi TerestrialFARIS VERLIANSYAHNessuna valutazione finora
- LM2TB8 2018 (Online)Documento252 pagineLM2TB8 2018 (Online)SandhirNessuna valutazione finora
- IBPS Clerk Pre QUANT Memory Based 2019 QuestionsDocumento8 pagineIBPS Clerk Pre QUANT Memory Based 2019 Questionsk vinayNessuna valutazione finora
- Nestlé CASEDocumento3 pagineNestlé CASEAli Iqbal CheemaNessuna valutazione finora
- Ebops PDFDocumento2 pagineEbops PDFtuan nguyen duyNessuna valutazione finora
- M.Plan SYLLABUS 2022-24Documento54 pagineM.Plan SYLLABUS 2022-24Mili DawsonNessuna valutazione finora
- LKG Math Question Paper: 1. Count and Write The Number in The BoxDocumento6 pagineLKG Math Question Paper: 1. Count and Write The Number in The BoxKunal Naidu60% (5)
- WinCC Control CenterDocumento300 pagineWinCC Control Centerwww.otomasyonegitimi.comNessuna valutazione finora
- Innovativ and Liabl :: Professional Electronic Control Unit Diagnosis From BoschDocumento28 pagineInnovativ and Liabl :: Professional Electronic Control Unit Diagnosis From BoschacairalexNessuna valutazione finora
- Research On Export Trade in BangladeshDocumento7 pagineResearch On Export Trade in BangladeshFarjana AnwarNessuna valutazione finora
- 100 20210811 ICOPH 2021 Abstract BookDocumento186 pagine100 20210811 ICOPH 2021 Abstract Bookwafiq alibabaNessuna valutazione finora
- Technion - Computer Science Department - Technical Report CS0055 - 1975Documento25 pagineTechnion - Computer Science Department - Technical Report CS0055 - 1975MoltKeeNessuna valutazione finora
- Ae - Centuries Before 1400 Are Listed As Browsable DirectoriesDocumento3 pagineAe - Centuries Before 1400 Are Listed As Browsable DirectoriesPolNeimanNessuna valutazione finora
- Advent Wreath Lesson PlanDocumento2 pagineAdvent Wreath Lesson Planapi-359764398100% (1)
- Better Photography - April 2018 PDFDocumento100 pagineBetter Photography - April 2018 PDFPeter100% (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceDa EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNessuna valutazione finora
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDa EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tValutazione: 4.5 su 5 stelle4.5/5 (27)
- Transformed: Moving to the Product Operating ModelDa EverandTransformed: Moving to the Product Operating ModelValutazione: 4 su 5 stelle4/5 (1)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureDa EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureValutazione: 4.5 su 5 stelle4.5/5 (2)
- The Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneDa EverandThe Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneValutazione: 4.5 su 5 stelle4.5/5 (5)
- Laws of UX: Using Psychology to Design Better Products & ServicesDa EverandLaws of UX: Using Psychology to Design Better Products & ServicesValutazione: 5 su 5 stelle5/5 (9)
- 507 Mechanical Movements: Mechanisms and DevicesDa Everand507 Mechanical Movements: Mechanisms and DevicesValutazione: 4 su 5 stelle4/5 (28)
- UX: Simple and Effective Methods for Designing UX Great Products Using UX Programming TheoriesDa EverandUX: Simple and Effective Methods for Designing UX Great Products Using UX Programming TheoriesNessuna valutazione finora
- Articulating Design Decisions: Communicate with Stakeholders, Keep Your Sanity, and Deliver the Best User ExperienceDa EverandArticulating Design Decisions: Communicate with Stakeholders, Keep Your Sanity, and Deliver the Best User ExperienceValutazione: 4 su 5 stelle4/5 (19)
- The Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsDa EverandThe Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsNessuna valutazione finora
- Design for How People Think: Using Brain Science to Build Better ProductsDa EverandDesign for How People Think: Using Brain Science to Build Better ProductsValutazione: 4 su 5 stelle4/5 (8)
- Designing for Behavior Change: Applying Psychology and Behavioral Economics 2nd EditionDa EverandDesigning for Behavior Change: Applying Psychology and Behavioral Economics 2nd EditionNessuna valutazione finora
- The Jobs To Be Done Playbook: Align Your Markets, Organization, and Strategy Around Customer NeedsDa EverandThe Jobs To Be Done Playbook: Align Your Markets, Organization, and Strategy Around Customer NeedsValutazione: 5 su 5 stelle5/5 (1)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchDa EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchValutazione: 4 su 5 stelle4/5 (10)
- Delft Design Guide -Revised edition: Perspectives- Models - Approaches - MethodsDa EverandDelft Design Guide -Revised edition: Perspectives- Models - Approaches - MethodsNessuna valutazione finora
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersDa EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersValutazione: 4 su 5 stelle4/5 (13)
- Design Thinking and Innovation Metrics: Powerful Tools to Manage Creativity, OKRs, Product, and Business SuccessDa EverandDesign Thinking and Innovation Metrics: Powerful Tools to Manage Creativity, OKRs, Product, and Business SuccessNessuna valutazione finora
- Troubleshooting Switching Power Converters: A Hands-on GuideDa EverandTroubleshooting Switching Power Converters: A Hands-on GuideValutazione: 5 su 5 stelle5/5 (2)