Potrebbero piacerti anche
- Curran Emmett 1969Documento74 pagineCurran Emmett 1969Aijaz AhmedNessuna valutazione finora
- Areviewonthedesignof Ternary Logic CircuitsDocumento21 pagineAreviewonthedesignof Ternary Logic CircuitshanumeshvburliNessuna valutazione finora
- Chapter 1 Quantum Computing Basics and ConceptsDocumento104 pagineChapter 1 Quantum Computing Basics and Conceptsams1ams1Nessuna valutazione finora
- Course Sheet Template CalDocumento4 pagineCourse Sheet Template CalSoftware EngineerNessuna valutazione finora
- A New Chaotic Map With Dynamic Analysis and Encryption Application in Internet of Health ThingsDocumento14 pagineA New Chaotic Map With Dynamic Analysis and Encryption Application in Internet of Health ThingsTSAFACK NESTORNessuna valutazione finora
- PhysRevMaterials 6 040301Documento22 paginePhysRevMaterials 6 040301CR uangNessuna valutazione finora
- A Versatile Memristor Model With NonlineDocumento7 pagineA Versatile Memristor Model With NonlineAmmuNessuna valutazione finora
- Final FilesDocumento14 pagineFinal FileszirodelfreeNessuna valutazione finora
- Monte Carlo Simulation in Statistical Physics An IDocumento36 pagineMonte Carlo Simulation in Statistical Physics An IMANISHA SHARMANessuna valutazione finora
- Introduction To Fractional Differential EquationsDocumento199 pagineIntroduction To Fractional Differential EquationsAzahel RangelNessuna valutazione finora
- Quantum Machine Learning of Eco-Environmental SurfacesDocumento3 pagineQuantum Machine Learning of Eco-Environmental SurfacesfariNessuna valutazione finora
- Ws Publishing 2016Documento7 pagineWs Publishing 2016beselamuNessuna valutazione finora
- Applications of Complex Analysis in Various FieldsDocumento5 pagineApplications of Complex Analysis in Various FieldsSowjanyaNessuna valutazione finora
- Network Science Meets Circuit Theory: Resistance Distance, Kirchhoff Index, and Foster's Theorems With Generalizations and UnificationDocumento14 pagineNetwork Science Meets Circuit Theory: Resistance Distance, Kirchhoff Index, and Foster's Theorems With Generalizations and UnificationManirajPerumalNessuna valutazione finora
- Annex A (EE)Documento19 pagineAnnex A (EE)Shibing DibingNessuna valutazione finora
- Quantum AlgorithmDocumento13 pagineQuantum Algorithmramzy lekhlifiNessuna valutazione finora
- Dynamic Harmonic Evolution Using The Extended Harmonic DomainDocumento9 pagineDynamic Harmonic Evolution Using The Extended Harmonic DomainRyan John RiveraNessuna valutazione finora
- Xpert: Computer Algebra For Metric Perturbation Theory: Pacs Numbers: 02.70.Wz, 02.40.ky, 04.25.NxDocumento11 pagineXpert: Computer Algebra For Metric Perturbation Theory: Pacs Numbers: 02.70.Wz, 02.40.ky, 04.25.Nxseppi05Nessuna valutazione finora
- Results in Engineering: Shashank Reddy Vadyala, Sai Nethra Betgeri, John C. Matthews, Elizabeth MatthewsDocumento12 pagineResults in Engineering: Shashank Reddy Vadyala, Sai Nethra Betgeri, John C. Matthews, Elizabeth MatthewsAlexandre CabrelNessuna valutazione finora
- Application of Classical and Operational Modal Analysis For Examination of Engineering StructuresDocumento6 pagineApplication of Classical and Operational Modal Analysis For Examination of Engineering StructuresShariq Hassan AwanNessuna valutazione finora
- Time-Delay Systems With Application To Mechanical Engineering Process Dynamics and ControlDocumento10 pagineTime-Delay Systems With Application To Mechanical Engineering Process Dynamics and Controlfelix_cialini9845Nessuna valutazione finora
- Lukac Perkowski Book Introduction and Quantum MechanicsDocumento104 pagineLukac Perkowski Book Introduction and Quantum MechanicsSitalk TeresNessuna valutazione finora
- Symmetry 15 02172Documento15 pagineSymmetry 15 02172niyexahehcxsvkharkNessuna valutazione finora
- Project PresentationDocumento26 pagineProject PresentationmdbabiNessuna valutazione finora
- 1001 2722 PDFDocumento12 pagine1001 2722 PDFIsmael ArceNessuna valutazione finora
- International Journal of Engineering Issues - Vol 2015 - No 1 - Paper3Documento7 pagineInternational Journal of Engineering Issues - Vol 2015 - No 1 - Paper3sophiaNessuna valutazione finora
- A Versatile Memristor Model With Nonlinear Dopant KineticsDocumento7 pagineA Versatile Memristor Model With Nonlinear Dopant KineticsTejendra DixitNessuna valutazione finora
- Modelling and Simulation of A Magnetic LevitationDocumento8 pagineModelling and Simulation of A Magnetic LevitationSkyFaLL-CSNessuna valutazione finora
- Computational PhysicsDocumento4 pagineComputational Physicsmattew657Nessuna valutazione finora
- 1 Mathematical Models: Math 263 - ODE For EngineersDocumento4 pagine1 Mathematical Models: Math 263 - ODE For EngineersChirag SoodNessuna valutazione finora
- история радараDocumento19 pagineистория радараНатали СмитNessuna valutazione finora
- Second-Order Continuous-Time Algorithms For Economic Power Dispatch in Smart GridsDocumento11 pagineSecond-Order Continuous-Time Algorithms For Economic Power Dispatch in Smart GridsHgoglezNessuna valutazione finora
- S. C. Farantos Et Al - Grid Enabled Molecular Dynamics: Classical and Quantum AlgorithmsDocumento16 pagineS. C. Farantos Et Al - Grid Enabled Molecular Dynamics: Classical and Quantum AlgorithmsMaxnamewNessuna valutazione finora
- Harmonic Perturbations: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocumento4 pagineHarmonic Perturbations: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNessuna valutazione finora
- 43 Peng JSTQE Integrated Neuro 2018 PDFDocumento15 pagine43 Peng JSTQE Integrated Neuro 2018 PDFShourya SONI (11C)Nessuna valutazione finora
- TaxonomyDocumento11 pagineTaxonomyiTzSydNessuna valutazione finora
- Applications of Computational ScienceDocumento3 pagineApplications of Computational ScienceADITYA SONINessuna valutazione finora
- Jordan18 Dynamical SymplecticDocumento28 pagineJordan18 Dynamical Symplecticzhugc.univNessuna valutazione finora
- Continuous MathematicsDocumento28 pagineContinuous MathematicsPallab ChakrabortyNessuna valutazione finora
- MEDLala 08Documento8 pagineMEDLala 08Fatiha HAMDINessuna valutazione finora
- Robust Control: Lecture Notes in Control and Information Sciences January 1993Documento15 pagineRobust Control: Lecture Notes in Control and Information Sciences January 1993Isai SanchezNessuna valutazione finora
- GCMS 11 010Documento3 pagineGCMS 11 010cheko1990Nessuna valutazione finora
- Leeetal Cyphysim Emsoft 2015Documento10 pagineLeeetal Cyphysim Emsoft 2015Nandanavanam AnanthNessuna valutazione finora
- A Chatterjee, An Introduction To The Proper Orthogonal DecompositionDocumento11 pagineA Chatterjee, An Introduction To The Proper Orthogonal DecompositionPiyush HotaNessuna valutazione finora
- Deep Learning For The Design of Non-Hermitian Topolectrical CircuitsDocumento24 pagineDeep Learning For The Design of Non-Hermitian Topolectrical CircuitsjaccneeNessuna valutazione finora
- Reduced Order Modeling For Transient Analysis of Carbon Nanotubes InterconnectsDocumento6 pagineReduced Order Modeling For Transient Analysis of Carbon Nanotubes InterconnectsRavi KakaniNessuna valutazione finora
- Diff. Equ. Practical ExamolesDocumento5 pagineDiff. Equ. Practical ExamolesMohammad YusufNessuna valutazione finora
- Simulation and Control Design of An Uniaxial Magnetic Levitation SystemDocumento6 pagineSimulation and Control Design of An Uniaxial Magnetic Levitation SystemElmer Mamani PretelNessuna valutazione finora
- Fractal Calculus PDFDocumento6 pagineFractal Calculus PDFneoalphaNessuna valutazione finora
- BeliefinCFD-2019 10 28Documento55 pagineBeliefinCFD-2019 10 28jiexing ZhangNessuna valutazione finora
- Projects2017-4 12 PDFDocumento54 pagineProjects2017-4 12 PDFRAhul KumarNessuna valutazione finora
- How To Solve A Linear System of Equations Using A Quantum ComputerDocumento35 pagineHow To Solve A Linear System of Equations Using A Quantum ComputerMuhammad Adnan KhalidNessuna valutazione finora
- A CRITICAL STUDY OF COMPLEX ANALYSIS WITH SPECIAL REFERENCE TO MATHEMATICS AS A BRANCH by Shri S H SankanagoudarDocumento4 pagineA CRITICAL STUDY OF COMPLEX ANALYSIS WITH SPECIAL REFERENCE TO MATHEMATICS AS A BRANCH by Shri S H SankanagoudarMild wayNessuna valutazione finora
- A 10-Year Mechatronics Curriculum Development - Part-II - IEEEDocumento7 pagineA 10-Year Mechatronics Curriculum Development - Part-II - IEEEFatima AhsanNessuna valutazione finora
- Introduction To Computational ScienceDocumento9 pagineIntroduction To Computational ScienceChristopher AdvinculaNessuna valutazione finora
- A Framework For Modeling Cyber-Physical Switching Attacks in Smart GridDocumento13 pagineA Framework For Modeling Cyber-Physical Switching Attacks in Smart GridlaeeeqNessuna valutazione finora
- System Identification of Model Steel Chimney With Fuzzy LogicDocumento6 pagineSystem Identification of Model Steel Chimney With Fuzzy LogicJessica JaraNessuna valutazione finora
- Principles of Control Systems Engineering Vincent Del Toro and Sydney R. Parker PDFDocumento715 paginePrinciples of Control Systems Engineering Vincent Del Toro and Sydney R. Parker PDFAlaor Saccomano100% (2)
- Distributed Dynamic Programming: Thar Appl.. Vol. 6, Pp. 213-222. 1978. Oprimization. New York: Van NostrandDocumento7 pagineDistributed Dynamic Programming: Thar Appl.. Vol. 6, Pp. 213-222. 1978. Oprimization. New York: Van Nostrandarun_kejariwalNessuna valutazione finora
- From Dimension-Free Matrix Theory to Cross-Dimensional Dynamic SystemsDa EverandFrom Dimension-Free Matrix Theory to Cross-Dimensional Dynamic SystemsNessuna valutazione finora
- Not Copyedited: Model Predictive Control of Fractional Order SystemsDocumento20 pagineNot Copyedited: Model Predictive Control of Fractional Order SystemsVignesh RamakrishnanNessuna valutazione finora
- BS2017 351Documento10 pagineBS2017 351Vignesh RamakrishnanNessuna valutazione finora
- Ma2011 PDFDocumento14 pagineMa2011 PDFVignesh RamakrishnanNessuna valutazione finora
- E-Receipt For State Bank Collect PaymentDocumento1 paginaE-Receipt For State Bank Collect PaymentVignesh RamakrishnanNessuna valutazione finora
- Podcast 2 Selection of Sensors For Domestic Applications by Vignesh Ramakrishnan Anjana ManojDocumento3 paginePodcast 2 Selection of Sensors For Domestic Applications by Vignesh Ramakrishnan Anjana ManojVignesh RamakrishnanNessuna valutazione finora
- Prezentare OvidiuProdan 2015 PDFDocumento14 paginePrezentare OvidiuProdan 2015 PDFVignesh RamakrishnanNessuna valutazione finora
- 657186Documento313 pagine657186Vignesh RamakrishnanNessuna valutazione finora
- Paper 18 20 2009 PDFDocumento7 paginePaper 18 20 2009 PDFVignesh RamakrishnanNessuna valutazione finora
- Phy Revb PDFDocumento11 paginePhy Revb PDFVignesh RamakrishnanNessuna valutazione finora
- Lazarevic PDFDocumento212 pagineLazarevic PDFVignesh RamakrishnanNessuna valutazione finora
- Fracweyl PDFDocumento219 pagineFracweyl PDFVignesh RamakrishnanNessuna valutazione finora
- Probing Fractal Magnetic Domains On Multiple Length Scales in ND Fe BDocumento4 pagineProbing Fractal Magnetic Domains On Multiple Length Scales in ND Fe BVignesh RamakrishnanNessuna valutazione finora
- J ( ) X (T J O: Modeling of Heat Transfer Process by Using Discrete Fractional-Order Neural NetworksDocumento5 pagineJ ( ) X (T J O: Modeling of Heat Transfer Process by Using Discrete Fractional-Order Neural NetworksVignesh RamakrishnanNessuna valutazione finora
- Variable Order and Distributed Order Fractional Operators: NASA/TM - 2002-211376Documento43 pagineVariable Order and Distributed Order Fractional Operators: NASA/TM - 2002-211376Vignesh RamakrishnanNessuna valutazione finora
- Material & Technology: o o o o o oDocumento5 pagineMaterial & Technology: o o o o o oVignesh RamakrishnanNessuna valutazione finora
- Digital Adaptive Control System Design For A Particular Class of Hydraulic SystemsDocumento10 pagineDigital Adaptive Control System Design For A Particular Class of Hydraulic SystemsVignesh RamakrishnanNessuna valutazione finora
- Dorcak Petras 2007 PDFDocumento7 pagineDorcak Petras 2007 PDFVignesh RamakrishnanNessuna valutazione finora
- Complex gnc05 PDFDocumento17 pagineComplex gnc05 PDFVignesh RamakrishnanNessuna valutazione finora
- Random Variable N N Mean or Expected Value: Number of Ducks Type of Duck AmountDocumento2 pagineRandom Variable N N Mean or Expected Value: Number of Ducks Type of Duck AmountAngie PastorNessuna valutazione finora
- Starkville Dispatch Eedition 12-9-18Documento28 pagineStarkville Dispatch Eedition 12-9-18The DispatchNessuna valutazione finora
- Remuneration Is Defined As Payment or Compensation Received For Services or Employment andDocumento3 pagineRemuneration Is Defined As Payment or Compensation Received For Services or Employment andWitty BlinkzNessuna valutazione finora
- Quality in CRDocumento10 pagineQuality in CRkaushikcrNessuna valutazione finora
- Design of Flyback Transformers and Filter Inductor by Lioyd H.dixon, Jr. Slup076Documento11 pagineDesign of Flyback Transformers and Filter Inductor by Lioyd H.dixon, Jr. Slup076Burlacu AndreiNessuna valutazione finora
- Economies and Diseconomies of ScaleDocumento7 pagineEconomies and Diseconomies of Scale2154 taibakhatunNessuna valutazione finora
- Quantity DiscountDocumento22 pagineQuantity Discountkevin royNessuna valutazione finora
- Fr-E700 Instruction Manual (Basic)Documento155 pagineFr-E700 Instruction Manual (Basic)DeTiEnamoradoNessuna valutazione finora
- Bea Form 7 - Natg6 PMDocumento2 pagineBea Form 7 - Natg6 PMgoeb72100% (1)
- Braga - 2016 - On Standing's A Precariat Charter - Confronting The Precaritisation of Labour in Brazil and PortugalDocumento12 pagineBraga - 2016 - On Standing's A Precariat Charter - Confronting The Precaritisation of Labour in Brazil and PortugalLiam MurciaNessuna valutazione finora
- Go Ask Alice EssayDocumento6 pagineGo Ask Alice Essayafhbexrci100% (2)
- SMK Techno ProjectDocumento36 pagineSMK Techno Projectpraburaj619Nessuna valutazione finora
- Projects: Term ProjectDocumento2 pagineProjects: Term ProjectCoursePinNessuna valutazione finora
- Chapter 2 A Guide To Using UnixDocumento53 pagineChapter 2 A Guide To Using UnixAntwon KellyNessuna valutazione finora
- PovidoneDocumento2 paginePovidoneElizabeth WalshNessuna valutazione finora
- Introduction To Wireless and Mobile Systems 4th Edition Agrawal Solutions ManualDocumento12 pagineIntroduction To Wireless and Mobile Systems 4th Edition Agrawal Solutions Manualethelbertsangffz100% (34)
- Practitioners Guide For Business Development Planning in FPOsDocumento70 paginePractitioners Guide For Business Development Planning in FPOsMythreyi ChichulaNessuna valutazione finora
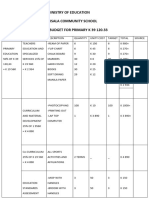
- Ministry of Education Musala SCHDocumento5 pagineMinistry of Education Musala SCHlaonimosesNessuna valutazione finora
- Nat Law 2 - CasesDocumento12 pagineNat Law 2 - CasesLylo BesaresNessuna valutazione finora
- Kicks: This Brochure Reflects The Product Information For The 2020 Kicks. 2021 Kicks Brochure Coming SoonDocumento8 pagineKicks: This Brochure Reflects The Product Information For The 2020 Kicks. 2021 Kicks Brochure Coming SoonYudyChenNessuna valutazione finora
- We Move You. With Passion.: YachtDocumento27 pagineWe Move You. With Passion.: YachthatelNessuna valutazione finora
- In Partial Fulfillment of The Requirements For The Award of The Degree ofDocumento66 pagineIn Partial Fulfillment of The Requirements For The Award of The Degree ofcicil josyNessuna valutazione finora
- LICDocumento82 pagineLICTinu Burmi Anand100% (2)
- Aman 5Documento1 paginaAman 5HamidNessuna valutazione finora
- Safety Data Sheet: Fumaric AcidDocumento9 pagineSafety Data Sheet: Fumaric AcidStephen StantonNessuna valutazione finora
- Bank of AmericaDocumento1 paginaBank of AmericaBethany MangahasNessuna valutazione finora
- Life Cycle Cost Analysis of Hvac System in Office ProjectsDocumento3 pagineLife Cycle Cost Analysis of Hvac System in Office ProjectsVashuka GhritlahreNessuna valutazione finora
- Study of Risk Perception and Potfolio Management of Equity InvestorsDocumento58 pagineStudy of Risk Perception and Potfolio Management of Equity InvestorsAqshay Bachhav100% (1)
- Notice For AsssingmentDocumento21 pagineNotice For AsssingmentViraj HibareNessuna valutazione finora
- 6 AsianregionalismDocumento32 pagine6 AsianregionalismChandria Ford100% (1)